
| Transcriber’s note: |
A few typographical errors have been corrected. They
appear in the text like this, and the
explanation will appear when the mouse pointer is moved over the marked
passage. Sections in Greek will yield a transliteration
when the pointer is moved over them, and words using diacritic characters in the
Latin Extended Additional block, which may not display in some fonts or browsers, will
display an unaccented version. Links to other EB articles: Links to articles residing in other EB volumes will be made available when the respective volumes are introduced online. |
Articles in This Slice
MATTER. Our conceptions of the nature and structure of matter have been profoundly influenced in recent years by investigations on the Conduction of Electricity through Gases (see Conduction, Electric) and on Radio-activity (q.v.). These researches and the ideas which they have suggested have already thrown much light on some of the most fundamental questions connected with matter; they have, too, furnished us with far more powerful methods for investigating many problems connected with the structure of matter than those hitherto available. There is thus every reason to believe that our knowledge of the structure of matter will soon become far more precise and complete than it is at present, for now we have the means of settling by testing directly many points which are still doubtful, but which formerly seemed far beyond the reach of experiment.
The Molecular Theory of Matter—the only theory ever seriously advocated—supposes that all visible forms of matter are collocations of simpler and smaller portions. There has been a continuous tendency as science has advanced to reduce further and further the number of the different kinds of things of which all matter is supposed to be built up. First came the molecular theory teaching us to regard matter as made up of an enormous number of small particles, each kind of matter having its characteristic particle, thus the particles of water were supposed to be different from those of air and indeed from those of any other substance. Then came Dalton’s Atomic Theory which taught that these molecules, in spite of their almost infinite variety, were all built up of still smaller bodies, the atoms of the chemical elements, and that the number of different types of these smaller bodies was limited to the sixty or seventy types which represent the atoms of the substance regarded by chemists as elements.
In 1815 Prout suggested that the atoms of the heavier chemical elements were themselves composite and that they were all built up of atoms of the lightest element, hydrogen, so that all the different forms of matter are edifices built of the same material—the atom of hydrogen. If the atoms of hydrogen do not alter in weight when they combine to form atoms of other elements the atomic weights of all elements would be multiples of that of hydrogen; though the number of elements whose atomic weights are multiples or very nearly so of hydrogen is very striking, there are several which are universally admitted to have atomic weights differing largely from whole numbers. We do not know enough about gravity to say whether this is due to the change of weight of the hydrogen atoms when they combine to form other atoms, or whether the primordial form from which all matter is built up is something other than the hydrogen atom. Whatever may be the nature of this primordial form, the tendency of all recent discoveries has been to emphasize the truth of the conception of a common basis of matter of all kinds. That the atoms of the different elements have a common basis, that they behave as if they consisted of different numbers of small particles of the same kind, is proved to most minds by the Periodic Law of Mendeléeff and Newlands (see Element). This law shows that the physical and chemical properties of the different elements are determined by their atomic weights, or to use the language of mathematics, the properties of an element are functions of its atomic weight. Now if we constructed models of the atoms out of different materials, the atomic weight would be but one factor out of many which would influence the physical and chemical properties of the model, we should require to know more than the atomic weight to fix its behaviour. If we were to plot a curve representing the variation of some property of the substance with the atomic weight we should not expect the curve to be a smooth one, for instance two atoms might have the same atomic weight and yet if they were made of different materials have no other property in common. The influence of the atomic weight on the properties of the elements is nowhere more strikingly shown than in the recent developments of physics connected with the discharge of electricity through gases and with radio-activity. The transparency of bodies to Röntgen rays, to cathode rays, to the rays emitted by radio-active substances, the quality of the secondary radiation emitted by the different elements are all determined by the atomic weight of the element. So much is this the case that the behaviour of the element with respect to these rays has been used to determine its atomic weight, when as in the case of Indium, uncertainty as to the valency of the element makes the result of ordinary chemical methods ambiguous.
The radio-active elements indeed furnish us with direct evidence of this unity of composition of matter, for not only does one element uranium, produce another, radium, but all the radio-active substances give rise to helium, so that the substance of the atoms of this gas must be contained in the atoms of the radio-active elements.
It is not radio-active atoms alone that contain a common constituent, for it has been found that all bodies can by suitable treatment, such as raising them to incandescence or exposing them to ultra-violet light, be made to emit negatively electrified particles, and that these particles are the same from whatever source they may be derived. These particles all carry the same charge of negative electricity and all have the same mass, this mass is exceedingly small even when compared with the mass of an atom of hydrogen, which until the discovery of these particles was the smallest mass known to science. These 892 particles are called corpuscles or electrons; their mass according to the most recent determinations is only about 1⁄1700 of that of an atom of hydrogen, and their radius is only about one hundred-thousandth part of the radius of the hydrogen atom. As corpuscles of this kind can be obtained from all substances, we infer that they form a constituent of the atoms of all bodies. The atoms of the different elements do not all contain the same number of corpuscles—there are more corpuscles in the atoms of the heavier elements than in the atoms of the lighter ones; in fact, many different considerations point to the conclusion that the number of corpuscles in the atom of any element is proportional to the atomic weight of the element. Different methods of estimating the exact number of corpuscles in the atom have all led to the conclusion that this number is of the same order as the atomic weight; that, for instance, the number of corpuscles in the atom of oxygen is not a large multiple of 16. Some methods indicate that the number of corpuscles in the atom is equal to the atomic weight, while the maximum value obtained by any method is only about four times the atomic weight. This is one of the points on which further experiments will enable us to speak with greater precision. Thus one of the constituents of all atoms is the negatively charged corpuscle; since the atoms are electrically neutral, this negative charge must be accompanied by an equal positive one, so that on this view the atoms must contain a charge of positive electricity proportional to the atomic weight; the way in which this positive electricity is arranged is a matter of great importance in the consideration of the constitution of matter. The question naturally arises, is the positive electricity done up into definite units like the negative, or does it merely indicate a property acquired by an atom when one or more corpuscles leave it? It is very remarkable that we have up to the present (1910), in spite of many investigations on this point, no direct evidence of the existence of positively charged particles with a mass comparable with that of a corpuscle; the smallest positive particle of which we have any direct indication has a mass equal to the mass of an atom of hydrogen, and it is a most remarkable fact that we get positively charged particles having this mass when we send the electric discharge through gases at low pressures, whatever be the kind of gas. It is no doubt exceedingly difficult to get rid of traces of hydrogen in vessels containing gases at low pressures through which an electric discharge is passing, but the circumstances under which the positively electrified particles just alluded to appear, and the way in which they remain unaltered in spite of all efforts to clear out any traces of hydrogen, all seem to indicate that these positively electrified particles, whose mass is equal to that of an atom of hydrogen, do not come from minute traces of hydrogen present as an impurity but from the oxygen, nitrogen, or helium, or whatever may be the gas through which the discharge passes. If this is so, then the most natural conclusion we can come to is that these positively electrified particles with the mass of the atom of hydrogen are the natural units of positive electricity, just as the corpuscles are those of negative, and that these positive particles form a part of all atoms.
Thus in this way we are led to an electrical view of the constitution of the atom. We regard the atom as built up of units of negative electricity and of an equal number of units of positive electricity; these two units are of very different mass, the mass of the negative unit being only 1⁄1700 of that of the positive. The number of units of either kind is proportional to the atomic weight of the element and of the same order as this quantity. Whether this is anything besides the positive and negative electricity in the atom we do not know. In the present state of our knowledge of the properties of matter it is unnecessary to postulate the existence of anything besides these positive and negative units.
The atom of a chemical element on this view of the constitution of matter is a system formed by n corpuscles and n units of positive electricity which is in equilibrium or in a state of steady motion under the electrical forces which the charged 2n constituents exert upon each other. Sir J. J. Thomson (Phil. Mag., March 1904, “Corpuscular Theory of Matter”) has investigated the systems in steady motion which can be formed by various numbers of negatively electrified particles immersed in a sphere of uniform positive electrification, a case, which in consequence of the enormous volume of the units of positive electricity in comparison with that of the negative has much in common with the problem under consideration, and has shown that some of the properties of n systems of corpuscles vary in a periodic way suggestive of the Periodic Law in Chemistry as n is continually increased.
Mass on the Electrical Theory of Matter.—One of the most characteristic things about matter is the possession of mass. When we take the electrical theory of matter the idea of mass takes new and interesting forms. This point may be illustrated by the case of a single electrified particle; when this moves it produces in the region around it a magnetic field, the magnetic force being proportional to the velocity of the electrified particle.1 In a magnetic field, however, there is energy, and the amount of energy per unit volume at any place is proportional to the square of the magnetic force at that place. Thus there will be energy distributed through the space around the moving particle, and when the velocity of the particle is small compared with that of light we can easily show that the energy in the region around the charged particle is μe2/3a, when v is the velocity of the particle, e its charge, a its radius, and μ the magnetic permeability of the region round the particle. If m is the ordinary mass of the particle, the part of the kinetic energy due to the motion of this mass is 1⁄2 mv2, thus the total kinetic energy is 1⁄2 (m + 2⁄3μe2/a). Thus the electric charge on the particle makes it behave as if its mass were increased by 2⁄3μe2/a. Since this increase in mass is due to the energy in the region outside the charged particle, it is natural to look to that region for this additional mass. This region is traversed by the tubes of force which start from the electrified body and move with it, and a very simple calculation shows that we should get the increase in the mass which is due to the electrification if we suppose that these tubes of force as they move carry with them a certain amount of the ether, and that this ether had mass. The mass of ether thus carried along must be such that the amount of it in unit volume at any part of the field is such that if this were to move with the velocity of light its kinetic energy would be equal to the potential energy of the electric field in the unit volume under consideration. When a tube moves this mass of ether only participates in the motion at right angles to the tube, it is not set in motion by a movement of the tube along its length. We may compare the mass which a charged body acquires in virtue of its charge with the additional mass which a ball apparently acquires when it is placed in water; a ball placed in water behaves as if its mass were greater than its mass when moving in vacuo; we can easily understand why this should be the case, because when the ball in the water moves the water around it must move as well; so that when a force acting on the ball sets it in motion it has to move some of the water as well as the ball, and thus the ball behaves as if its mass were increased. Similarly in the case of the electrified particle, which when it moves carries with it its lines of force, which grip the ether and carry some of it along with them. When the electrified particle is moved a mass of ether has to be moved too, and thus the apparent mass of the particle is increased. The mass of the electrified particle is thus resident in every part of space reached by its lines of force; in this sense an electrified body may be said to extend to an infinite distance; the amount of the mass of the ether attached to the particle diminishes so rapidly as we recede from it that the contributions of regions remote from the particle 893 are quite insignificant, and in the case of a particle as small as a corpuscle not one millionth part of its mass will be farther away from it than the radius of an atom.
The increase in the mass of a particle due to given charges varies as we have seen inversely as the radius of the particle; thus the smaller the particle the greater the increase in the mass. For bodies of appreciable size or even for those as small as ordinary atoms the effect of any realizable electric charge is quite insignificant, on the other hand for the smallest bodies known, the corpuscle, there is evidence that the whole of the mass is due to the electric charge. This result has been deduced by the help of an extremely interesting property of the mass due to a charge of electricity, which is that this mass is not constant but varies with the velocity. This comes about in the following way. When the charged particle, which for simplicity we shall suppose to be spherical, is at rest or moving very slowly the lines of electric force are distributed uniformly around it in all directions; when the sphere moves, however, magnetic forces are produced in the region around it, while these, in consequence of electro-magnetic induction in a moving magnetic field, give rise to electric forces which displace the tubes of electric force in such a way as to make them set themselves so as to be more at right angles to the direction in which they are moving than they were before. Thus if the charged sphere were moving along the line AB, the tubes of force would, when the sphere was in motion, tend to leave the region near AB and crowd towards a plane through the centre of the sphere and at right angles to AB, where they would be moving more nearly at right angles to themselves. This crowding of the lines of force increases, however, the potential energy of the electric field, and since the mass of the ether carried along by the lines of force is proportional to the potential energy, the mass of the charged particle will also be increased. The amount of variation of the mass with the velocity depends to some extent on the assumptions we make as to the shape of the corpuscle and the way in which it is electrified. The simplest expression connecting the mass with the velocity is that when the velocity is v the mass is equal to 2⁄3μe2/a [1/(1 − v2/c2)1/2] where c is the velocity of light. We see from this that the variation of mass with velocity is very small unless the velocity of the body approaches that of light, but when, as in the case of the β particles emitted by radium, the velocity is only a few per cent less than that of light, the effect of velocity on the mass becomes very considerable; the formula indicates that if the particles were moving with a velocity equal to that of light they would behave as if their mass were infinite. By observing the variation in the mass of a corpuscle as its velocity changes we can determine how much of the mass depends upon the electric charge and how much is independent of it. For since the latter part of the mass is independent of the velocity, if it predominates the variation with velocity of the mass of a corpuscle will be small; if on the other hand it is negligible the variation in mass with velocity will be that indicated by theory given above. The experiment of Kaufmann (Göttingen Nach., Nov. 8, 1901), Bucherer (Ann. der Physik., xxviii. 513, 1909) on the masses of the β particles shot out by radium, as well as those by Hupka (Berichte der deutsch. physik. Gesell., 1909, p. 249) on the masses of the corpuscle in cathode rays are in agreement with the view that the whole of the mass of these particles is due to their electric charge.
The alteration in the mass of a moving charge with its velocity is primarily due to the increase in the potential energy which accompanies the increase in velocity. The connexion between potential energy and mass is general and holds for any arrangement of electrified particles; thus if we assume the electrical constitution of matter, there will be a part of the mass of any system dependent upon the potential energy and in fact proportional to it. Thus every change in potential energy, such for example as occurs when two elements combine with evolution or absorption of heat, must be attended by a change in mass. The amount of this change can be calculated by the rule that if a mass equal to the change in mass were to move with the velocity of light its kinetic energy would equal the change in the potential energy. If we apply this result to the case of the combination of hydrogen and oxygen, where the evolution of heat, about 1.6 × 1011 ergs per gramme of water, is greater than in any other known case of chemical combination, we see that the change in mass would only amount to one part in 3000 million, which is far beyond the reach of experiment. The evolution of energy by radio-active substances is enormously larger than in ordinary chemical transformations; thus one gramme of radium emits per day about as much energy as is evolved in the formation of one gramme of water, and goes on doing this for thousands of years. We see, however, that even in this case it would require hundreds of years before the changes in mass became appreciable.
The evolution of energy from the gaseous emanation given off by radium is more rapid than that from radium itself, since according to the experiments of Rutherford (Rutherford, Radio-activity, p. 432) a gramme of the emanation would evolve about 2.1 × 1016 ergs in four days; this by the rule given above would diminish the mass by about one part in 20,000; but since only very small quantities of the emanation could be used the detection of the change of mass does not seem feasible even in this case.
On the view we have been discussing the existence of potential energy due to an electric field is always associated with mass; wherever there is potential energy there is mass. On the electro-magnetic theory of light, however, a wave of light is accompanied by electric forces, and therefore by potential energy; thus waves of light must behave as if they possessed mass. It may be shown that it follows from the same principles that they must also possess momentum, the direction of the momentum being the direction along which the light is travelling; when the light is absorbed by an opaque substance the momentum in the light is communicated to the substance, which therefore behaves as if the light pressed upon it. The pressure exerted by light was shown by Maxwell (Electricity and Magnetism, 3rd ed., p. 440) to be a consequence of his electro-magnetic theory, its existence has been established by the experiment of Lebedew, of Nichols and Hull, and of Poynting.
We have hitherto been considering mass from the point of view that the constitution of matter is electrical; we shall proceed to consider the question of weight from the same point of view. The relation between mass and weight Weight. is, while the simplest in expression, perhaps the most fundamental and mysterious property possessed by matter. The weight of a body is proportional to its mass, that is if the weights of a number of substances are equal the masses will be equal, whatever the substances may be. This result was verified to a considerable degree of approximation by Newton by means of experiments with pendulums; later, in 1830 Bessel by a very extensive and accurate series of experiments, also made on pendulums, showed that the ratio of mass to weight was certainly to one part in 60,000 the same for all the substances examined by him, these included brass, silver, iron, lead, copper, ivory, water.
The constancy of this ratio acquires new interest when looked at from the point of view of the electrical constitution of matter. We have seen that the atoms of all bodies contain corpuscles, that the mass of a corpuscle is only 1⁄1700 of the mass of an atom of hydrogen, that it carries a constant charge of negative electricity, and that its mass is entirely due to this charge, and can be regarded as arising from ether gripped by the lines of force starting from the electrical charge. The question at once suggests itself, Is this kind of mass ponderable? does it add to the weight of the body? and, if so, is the proportion between mass and weight the same as for ordinary bodies? Let us suppose for a moment that this mass is not ponderable, so that the corpuscles increase the mass but not the weight of an atom. Then, since the mass of a corpuscle is 1⁄1700 that of an atom of hydrogen, the addition or removal of one corpuscle would in the case of an atom of atomic weight x alter the mass by one part in 1700 x, without altering the weight, this would produce an effect of the 894 same magnitude on the ratio of mass to weight and would in the case of the atoms of the lighter elements be easily measurable in experiments of the same order of accuracy as those made by Bessel. If the number of corpuscles in the atom were proportional to the atomic weight, then the ratio of mass to weight would be constant whether the corpuscles were ponderable or not. If the number were not proportional there would be greater discrepancies in the ratio of mass to weight than is consistent with Bessel’s experiments if the corpuscles had no weight. We have seen there are other grounds for concluding that the number of corpuscles in an atom is proportional to the atom weight, so that the constancy of the ratio of mass to weight for a large number of substances does not enable us to determine whether or not mass due to charges of electricity is ponderable or not.
There seems some hope that the determination of this ratio for radio-active substances may throw some light on this point. The enormous amount of heat evolved by these bodies may indicate that they possess much greater stores of potential energy than other substances. If we suppose that the heat developed by one gramme of a radio-active substance in the transformations which it undergoes before it reaches the non-radio-active stage is a measure of the excess of the potential energy in a gramme of this substance above that in a gramme of non-radio-active substance, it would follow that a larger part of the mass was due to electric charges in radio-active than in non-radio-active substances; in the case of uranium this difference would amount to at least one part in 20,000 of the total mass. If this extra mass had no weight the ratio of mass to weight for uranium would differ from the normal amount by more than one part in 20,000, a quantity quite within the range of pendulum experiments. It thus appears very desirable to make experiments on the ratio of mass to weight for radio-active substances. Sir J. J. Thomson, by swinging a small pendulum whose bob was made of radium bromide, has shown that this ratio for radium does not differ from the normal by one part in 2000. The small quantity of radium available prevented the attainment of greater accuracy. Experiments just completed (1910) by Southerns at the Cavendish Laboratory on this ratio for uranium show that it is normal to an accuracy of one part in 200,000; indicating that in non-radio-active, as in radio-active, substances the electrical mass is proportional to the atomic weight.
Though but few experiments have been made in recent years on the value of the ratio of mass to weight, many important investigations have been made on the effect of alterations in the chemical and physical conditions on the weight of bodies. These have all led to the conclusion that no change which can be detected by our present means of investigation occurs in the weight of a body in consequence of any physical or chemical changes yet investigated. Thus Landolt, who devoted a great number of years to the question whether any change in weight occurs during chemical combination, came finally to the conclusion that in no case out of the many he investigated did any measurable change of weight occur during chemical combination. Poynting and Phillips (Proc. Roy. Soc., 76, p. 445), as well as Southerns (78, p. 392), have shown that change in temperature produces no change in the weight of a body; and Poynting has also shown that neither the weight of a crystal nor the attraction between two crystals depends at all upon the direction in which the axis of the crystal points. The result of these laborious and very carefully made experiments has been to strengthen the conviction that the weight of a given portion of matter is absolutely independent of its physical condition or state of chemical combinations. It should, however, be noticed that we have as yet no accurate investigation as to whether or not any changes of weight occur during radio-active transformations, such for example as the emanation from radium undergoes when the atoms themselves of the substance are disrupted.
It is a matter of some interest in connexion with a discussion of any views of the constitution of matter to consider the theories of gravitation which have been put forward to explain that apparently invariable property of matter—its weight. It would be impossible to consider in detail the numerous theories which have been put forward to account for gravitation; a concise summary of many of these has been given by Drude (Wied. Ann. 62, p. 1);2 there is no dearth of theories as to the cause of gravitation, what is lacking is the means of putting any of them to a decisive test.
There are, however, two theories of gravitation, both old, which seem to be especially closely connected with the idea of the electrical constitution of matter. The first of these is the theory, associated with the two fluid theory of electricity, that gravity is a kind of residual electrical effect, due to the attraction between the units of positive and negative electricity being a little greater than the repulsion between the units of electricity of the same kind. Thus on this view two charges of equal magnitude, but of opposite sign, would exert an attraction varying inversely as the square of the distance on a charge of electricity of either sign, and therefore an attraction on a system consisting of two charges equal in magnitude but opposite in sign forming an electrically neutral system. Thus if we had two neutral systems, A and B, A consisting of m positive units of electricity and an equal number of negative, while B has n units of each kind, then the gravitational attraction between A and B would be inversely proportional to the square of the distance and proportional to n m. The connexion between this view of gravity and that of the electrical constitution of matter is evidently very close, for if gravity arose in this way the weight of a body would only depend upon the number of units of electricity in the body. On the view that the constitution of matter is electrical, the fundamental units which build up matter are the units of electric charge, and as the magnitude of these charges does not change, whatever chemical or physical vicissitudes matter, the weight of matter ought not to be affected by such changes. There is one result of this theory which might possibly afford a means of testing it: since the charge on a corpuscle is equal to that on a positive unit, the weights of the two are equal; but the mass of the corpuscle is only 1⁄1700 of that of the positive unit, so that the acceleration of the corpuscle under gravity will be 1700 times that of the positive unit, which we should expect to be the same as that for ponderable matter or 981.
The acceleration of the corpuscle under gravity on this view would be 1.6 × 106. It does not seem altogether impossible that with methods slightly more powerful than those we now possess we might measure the effect of gravity on a corpuscle if the acceleration were as large as this.
The other theory of gravitation to which we call attention is that due to Le Sage of Geneva and published in 1818. Le Sage supposed that the universe was thronged with exceedingly small particles moving with very great velocities. These particles he called ultra-mundane corpuscles, because they came to us from regions far beyond the solar system. He assumed that these were so penetrating that they could pass through masses as large as the sun or the earth without being absorbed to more than a very small extent. There is, however, some absorption, and if bodies are made up of the same kind of atoms, whose dimensions are small compared with the distances between them, the absorption will be proportional to the mass of the body. So that as the ultra-mundane corpuscles stream through the body a small fraction, proportional to the mass of the body, of their momentum is communicated to it. If the direction of the ultra-mundane corpuscles passing through the body were uniformly distributed, the momentum communicated by them to the body would not tend to move it in one direction rather than in another, so that a body, A, alone in the universe and exposed to bombardment by the ultra-mundane corpuscles would remain at rest. If, however, there were a second body, B, in the neighbourhood of A, B will shield A from some of the corpuscles moving in the direction BA; thus A will not receive as much momentum in this direction as when it was alone; but in this case it only received just enough to 895 keep it in equilibrium, so that when B is present the momentum in the opposite direction will get the upper hand and A will move in the direction AB, and will thus be attracted by B. Similarly, we see that B will be attracted by A. Le Sage proved that the rate at which momentum was being communicated to A or B by the passage through them of his corpuscles was proportional to the product of the masses of A and B, and if the distance between A and B was large compared with their dimensions, inversely proportional to the square of the distance between them; in fact, that the forces acting on them would obey the same laws as the gravitational attraction between them. Clerk Maxwell (article “Atom,” Ency. Brit., 9th ed.) pointed out that this transference of momentum from the ultra-mundane corpuscles to the body through which they passed involved the loss of kinetic energy by the corpuscles, and if the loss of momentum were large enough to account for the gravitational attraction, the loss of kinetic energy would be so large that if converted into heat it would be sufficient to keep the body white hot. We need not, however, suppose that this energy is converted into heat; it might, as in the case where Röntgen rays are produced by the passage of electrified corpuscles through matter, be transformed into the energy of a still more penetrating form of radiation, which might escape from the gravitating body without heating it. It is a very interesting result of recent discoveries that the machinery which Le Sage introduced for the purpose of his theory has a very close analogy with things for which we have now direct experimental evidence. We know that small particles moving with very high speeds do exist, that they possess considerable powers of penetrating solids, though not, as far as we know at present, to an extent comparable with that postulated by Le Sage; and we know that the energy lost by them as they pass through a solid is to a large extent converted into a still more penetrating form of radiation, Röntgen rays. In Le Sage’s theory the only function of the corpuscles is to act as carriers of momentum, any systems which possessed momentum, moved with a high velocity and had the power of penetrating solids, might be substituted for them; now waves of electric and magnetic force, such as light waves or Röntgen rays, possess momentum, move with a high velocity, and the latter at any rate possess considerable powers of penetration; so that we might formulate a theory in which penetrating Röntgen rays replaced Le Sage’s corpuscles. Röntgen rays, however, when absorbed do not, as far as we know, give rise to more penetrating Röntgen rays as they should to explain attraction, but either to less penetrating rays or to rays of the same kind.
We have confined our attention in this article to the view that the constitution of matter is electrical; we have done so because this view is more closely in touch with experiment than any other yet advanced. The units of which matter is built up on this theory have been isolated and detected in the laboratory, and we may hope to discover more and more of their properties. By seeing whether the properties of matter are or are not such as would arise from a collection of units having these properties, we can apply to this theory tests of a much more definite and rigorous character than we can apply to any other theory of matter.
1 We may measure this velocity with reference to any axes, provided we refer the motion of all the bodies which come into consideration to the same axes.
2 A theory published after Drude’s paper in that of Professor Osborne Reynolds, given in his Rede lecture “On an Inversion of Ideas as to the Structure of the Universe.”
MATTERHORN, one of the best known mountains (14,782 ft.) in the Alps. It rises S.W. of the village of Zermatt, and on the frontier between Switzerland (canton of the Valais) and Italy. Though on the Swiss side it appears to be an isolated obelisk, it is really but the butt end of a ridge, while the Swiss slope is not nearly as steep or difficult as the grand terraced walls of the Italian slope. It was first conquered, after a number of attempts chiefly on the Italian side, on the 14th of July 1865, by Mr E. Whymper’s party, three members of which (Lord Francis Douglas, the Rev. C. Hudson and Mr Hadow) with the guide, Michel Croz, perished by a slip on the descent. Three days later it was scaled from the Italian side by a party of men from Val Tournanche. Nowadays it is frequently ascended in summer, especially from Zermatt.
MATTEUCCI, CARLO (1811-1868), Italian physicist, was born at Forlì on the 20th of June 1811. After attending the École Polytechnique at Paris, he became professor of physics successively at Bologna (1832), Ravenna (1837) and Pisa (1840). From 1847 he took an active part in politics, and in 1860 was chosen an Italian senator, at the same time becoming inspector-general of the Italian telegraph lines. Two years later he was minister of education. He died near Leghorn on the 25th of June 1868.
He was the author of four scientific treatises: Lezioni di fisica (2 vols., Pisa, 1841), Lezioni sui fenomeni fisicochimici dei corpi viventi (Pisa, 1844), Manuale di telegrafia elettrica (Pisa, 1850) and Cours spécial sur l’induction, le magnetisme de rotation, &c. (Paris, 1854). His numerous papers were published in the Annales de chimie et de physique (1829-1858); and most of them also appeared at the time in the Italian scientific journals. They relate almost entirely to electrical phenomena, such as the magnetic rotation of light, the action of gas batteries, the effects of torsion on magnetism, the polarization of electrodes, &c., sufficiently complete accounts of which are given in Wiedemann’s Galvanismus. Nine memoirs, entitled “Electro-Physiological Researches,” were published in the Philosophical Transactions, 1845-1860. See Bianchi’s Carlo Matteucci e l’Italia del suo tempo (Rome, 1874).
MATTHEW, ST (Μαθθαῖος or Ματθαῖος, probably a shortened form of the Hebrew equivalent to Theodorus), one of the twelve apostles, and the traditional author of the First Gospel, where he is described as having been a tax-gatherer or customs-officer (τελώνης, x. 3), in the service of the tetrarch Herod. The circumstances of his call to become a follower of Jesus, received as he sat in the “customs house” in one of the towns by the Sea of Galilee—apparently Capernaum (Mark ii. 1, 13), are briefly related in ix. 9. We should gather from the parallel narrative in Mark ii. 14, Luke v. 27, that he was at the time known as “Levi the son of Alphaeus” (compare Simon Cephas, Joseph Barnabas): if so, “James the son of Alphaeus” may have been his brother. Possibly “Matthew” (Yahweh’s gift) was his Christian surname, since two native names, neither being a patronymic, is contrary to Jewish usage. It must be noted, however, that Matthew and Levi were sometimes distinguished in early times, as by Heracleon (c. 170 A.D.), and more dubiously by Origen (c. Celsum, i. 62), also apparently in the Syriac Didascalia (sec. iii.), V. xiv. 14. It has generally been supposed, on the strength of Luke’s account (v. 29), that Matthew gave a feast in Jesus’ honour (like Zacchaeus, Luke xix. 6 seq.). But Mark (ii. 15), followed by Matthew (ix. 10), may mean that the meal in question was one in Jesus’ own home at Capernaum (cf. v. 1). In the lists of the Apostles given in the Synoptic Gospels and in Acts, Matthew ranks third or fourth in the second group of four—a fair index of his relative importance in the apostolic age. The only other facts related of Matthew on good authority concern him as Evangelist. Eusebius (H.E. iii. 24) says that he, like John, wrote only at the spur of necessity. “For Matthew, after preaching to Hebrews, when about to go also to others, committed to writing in his native tongue the Gospel that bears his name; and so by his writing supplied, for those whom he was leaving, the loss of his presence.” The value of this tradition, which may be based on Papias, who certainly reported that “Matthew compiled the Oracles (of the Lord) in Hebrew,” can be estimated only in connexion with the study of the Gospel itself (see below). No historical use can be made of the artificial story, in Sanhedrin 43a, that Matthew was condemned to death by a Jewish court (see Laihle, Christ in the Talmud, 71 seq.). According to the Gnostic Heracleon, quoted by Clement of Alexandria (Strom. iv. 9), Matthew died a natural death. The tradition as to his ascetic diet (in Clem. Alex. Paedag. ii. 16) maybe due to confusion with Matthias (cf. Mart. Matthaei, i.). The earliest legend as to his later labours, one of Syrian origin, places them in the Parthian kingdom, where it represents him as dying a natural death at Hierapolis (= Mabog on the Euphrates). This agrees with his legend as known to Ambrose and Paulinus of Nola, and is the most probable in itself. The legends which make him work with Andrew among the Anthropophagi near the Black Sea, or again in Ethiopia (Rufinus, and Socrates, H.E. i. 19), are due to confusion with Matthias, who from the first was associated in his Acts with Andrew (see M. Bonnet, Acta Apost. apocr., 1808, II. i. 65). Another 896 legend, his Martyrium, makes him labour and suffer in Mysore. He is commemorated as a martyr by the Greek Church on the 16th of November, and by the Roman on the 21st of September, the scene of his martyrdom being placed in Ethiopia. The Latin Breviary also affirms that his body was afterwards translated to Salerno, where it is said to lie in the church built by Robert Guiscard. In Christian art (following Jerome) the Evangelist Matthew is generally symbolized by the “man” in the imagery of Ezek. i. 10, Rev. iv. 7.
For the historical Matthew, see Ency. Bibl. and Zahn, Introd. to New Test., ii. 506 seq., 522 seq. For his legends, as under Mark.
MATTHEW, TOBIAS, or Tobie (1546-1628), archbishop of York, was the son of Sir John Matthew of Ross in Herefordshire, and of his wife Eleanor Crofton of Ludlow. He was born at Bristol in 1546. He was educated at Wells, and then in succession at University College and Christ Church, Oxford. He proceeded B.A. in 1564, and M.A. in 1566. He attracted the favourable notice of Queen Elizabeth, and his rise was steady though not very rapid. He was public orator in 1569, president of St John’s College, Oxford, in 1572, dean of Christ Church in 1576, vice-chancellor of the university in 1579, dean of Durham in 1583, bishop of Durham in 1595, and archbishop of York in 1606. In 1581 he had a controversy with the Jesuit Edmund Campion, and published at Oxford his arguments in 1638 under the title, Piissimi et eminentissimi viri Tobiae Matthew, archiepiscopi olim Eboracencis concio apologetica adversus Campianam. While in the north he was active in forcing the recusants to conform to the Church of England, preaching hundreds of sermons and carrying out thorough visitations. During his later years he was to some extent in opposition to the administration of James I. He was exempted from attendance in the parliament of 1625 on the ground of age and infirmities, and died on the 29th of March 1628. His wife, Frances, was the daughter of William Barlow, bishop of Chichester.
His son, Sir Tobias, or Tobie, Matthew (1577-1655), is remembered as the correspondent and friend of Francis Bacon. He was educated at Christ Church, and was early attached to the court, serving in the embassy at Paris. His debts and dissipations were a great source of sorrow to his father, from whom he is known to have received at different times £14,000, the modern equivalent of which is much larger. He was chosen member for Newport in Cornwall in the parliament of 1601, and member for St Albans in 1604. Before this time he had become the intimate friend of Bacon, whom he replaced as member for St Albans. When peace was made with Spain, on the accession of James I., he wished to travel abroad. His family, who feared his conversion to Roman Catholicism, opposed his wish, but he promised not to go beyond France. When once safe out of England he broke his word and went to Italy. The persuasion of some of his countrymen in Florence, one of whom is said to have been the Jesuit Robert Parsons, and a story he heard of the miraculous liquefaction of the blood of San Januarius at Naples, led to his conversion in 1606. When he returned to England he was imprisoned, and many efforts were made to obtain his reconversion without success. He would not take the oath of allegiance to the king. In 1608 he was exiled, and remained out of England for ten years, mostly in Flanders and Spain. He returned in 1617, but went abroad again in 1619. His friends obtained his leave to return in 1621. At home he was known as the intimate friend of Gondomar, the Spanish ambassador. In 1623 he was sent to join Prince Charles, afterwards Charles I., at Madrid, and was knighted on the 23rd of October of that year. He remained in England till 1640, when he was finally driven abroad by the parliament, which looked upon him as an agent of the pope. He died in the English college in Ghent on the 13th of October 1655. In 1618 he published an Italian translation of Bacon’s essays. The “Essay on Friendship” was written for him. He was also the author of a translation of The Confessions of the Incomparable Doctor St Augustine, which led him into controversy. His correspondence was published in London in 1660.
For the father, see John Le Neve’s Fasti ecclesiae anglicanae (London, 1716), and Anthony Wood’s Athenae oxonienses. For the son, the notice in Athenae oxonienses, an abridgment of his autobiographical Historical Relation of his own life, published by Alban Butler in 1795, and A. H. Matthew and A. Calthrop, Life of Sir Tobie Matthew (London, 1907).
MATTHEW, GOSPEL OF ST, the first of the four canonical Gospels of the Christian Church. The indications of the use of this Gospel in the two or three generations following the Apostolic Age (see Gospel) are more plentiful than of any of the others. Throughout the history of the Church, also, it has held a place second to none of the Gospels alike in public instruction and in the private reading of Christians. The reasons for its having impressed itself in this way and become thus familiar are in large part to be found in the characteristics noticed below. But in addition there has been from an early time the belief that it was the work of one of those publicans whose heart Jesus touched and of whose call to follow Him the three Synoptics contain an interesting account, but who is identified as Matthew (q.v.) only in this one (Matt. ix. 9-13 = Mark ii. 13-17 = Luke v. 27-32).
1. The Connexion of our Greek Gospel of Matthew with the Apostle whose name it bears.—The earliest reference to a writing by Matthew occurs in a fragment taken by Eusebius from the same work of Papias from which he has given an account of the composition of a record by Mark (Euseb. Hist. Eccl. iii. 39; see Mark, Gospel of St). The statement about Matthew is much briefer and is harder to interpret. In spite of much controversy, the same measure of agreement as to its meaning cannot be said to have been attained. This is the fragment: “Matthew, however, put together and wrote down the Oracles (τὰ λόγια συνέγραψεν) in the Hebrew language, and each man interpreted them as he was able.” Whether “the elder” referred to in the passage on Mark, or some other like authority, was the source of this statement also does not appear; but it is probable that this was the case from the context in which Eusebius gives it. Conservative writers on the Gospels have frequently maintained that the writing here referred to was virtually the Hebrew original of our Greek Gospel which bears his name. And it is indeed likely that Papias himself closely associated the latter with the Hebrew (or Aramaic) work by Matthew, of which he had been told, since the traditional connexion of this Greek Gospel with Matthew can hardly have begun later than this time. It is reasonable also to suppose that there was some ground for it. The description, however, of what Matthew did suits better the making of a collection of Christ’s discourses and sayings than the composition of a work corresponding in form and character to our Gospel of Matthew.
The next reference in Christian literature to a Gospel-record by Matthew is that of Irenaeus in his famous passage on the four Gospels (Adv. haer. iii. i. r). He says that it was written in Hebrew; but in all probability he regarded the Greek Gospel, which stood first in his, as it does in our, enumeration, as in the strict sense a translation of the Apostle’s work; and this was the view of it universally taken till the 16th century, when some of the scholars of the Reformation maintained that the Greek Gospel itself was by Matthew.
The actual phenomena, however, of this Gospel, and of its relation to sources that have been used in it, cannot be explained consistently with either of the two views just mentioned. It is a composite work in which two chief sources, known in Greek to the author of our present Gospel, have, together with some other matter, been combined. It is inconceivable that one of the Twelve should have proceeded in this way in giving an account of Christ’s ministry. One of the chief documents, however, here referred to seems to correspond in character with the description given in Papias’ fragment of a record of the compilation of “the divine utterances” made by Matthew; and the use made of it in our first Gospel may explain the connexion of this Apostle’s name with it. In the Gospel of Luke also, it is true, this same source has been used for the teaching of Jesus. But the original Aramaic Logian document may have been more largely reproduced in our Greek Matthew. Indeed, in the case of one important passage (v. 17-48) this is suggested by a comparison with 897 Luke itself, and there are one or two others where from the character of the matter it seems not improbable, especially vi. 1-18 and xxiii. 1-5, 7b-10, 15-22. On the whole, as will be seen below, what appears to be a Palestinian form of the Gospel-tradition is most fully represented in this Gospel; but in many instances at least this may well be due to some other cause than the use of the original Logian document.
2. The Plan on which the Contents is arranged.—In two respects the arrangement of the book itself is significant.
(a) As to the general outline in the first half of the account of the Galilean ministry (iv. 23-xi. 30). Immediately after relating the call of the first four disciples (iv. 18-22) the evangelist gives in iv. 23 a comprehensive summary of Christ’s work in Galilee under its two chief aspects, teaching and healing. In the sequel both these are illustrated. First, he gives in the Sermon on the Mount (v.-vii.) a considerable body of teaching, of the kind required by the disciples of Jesus generally, and a large portion of which probably also stood not far from the beginning of the Logian document. After this he turns to the other aspect. Up to this point he has mentioned no miracle. He now describes a number in succession, introducing all but the first of those told between Mark i. 23 and ii. 12, and also four specially remarkable ones, which occurred a good deal later according to Mark’s order (Matt. viii. 23-34 = Mark iv. 35-v. 20; Matt. ix. 18-26 = Mark v. 21-43); and he also adds some derived from another source, or other sources (viii. 5-13; ix. 27-34). Then, after another general description at ix. 35, similar to that at iv. 23, he brings strikingly before us the needs of the masses of the people and Christ’s compassion for them, and so introduces the mission of the Twelve (which again occurs later according to Mark’s order, viz. at vi. 7 seq.), whereby the ministry both of teaching and of healing was further extended (ix. 36-x. 42). Finally, the message of John the Baptist, and the reply of Jesus, and the reflections that follow (xi.), bring out the significance of the preceding narrative. It should be observed that examples have been given of every kind of mighty work referred to in the reply of Jesus to the messengers of the Baptist; and that in the discourse which follows their departure the perversity and unbelief of the people generally are condemned, and the faith of the humble-minded is contrasted therewith. The greater part of the matter from ix. 37 to end of xi. is taken from the Logian document. After this point, i.e. from xii. 1 onwards, the first evangelist follows Mark almost step by step down to the point (Mark xvi. 8), after which Mark’s Gospel breaks off, and another ending has been supplied; and gives in substance almost the whole of Mark’s contents, with the exception that he passes over the few narratives that he has (as we have seen) placed earlier. At the same time he brings in additional matter in connexion with most of the Marcan sections.
(b) With the accounts of the words of Jesus spoken on certain occasions, which our first evangelist found given in one or another of his sources, he has combined other pieces, taken from other parts of the same source or from different sources, which seemed to him connected in subject, e.g. into the discourse spoken on a mountain, when crowds from all parts were present, given in the Logian document, he has introduced some pieces which, as we infer from Luke, stood separately in that document (cf. Matt. vi. 19-21 with Luke xii. 33, 34; Matt. vi. 22, 23 with Luke xi. 34-36; Matt. vi. 24 with Luke xvi. 13; Matt. vi. 25-34 with Luke xii. 22-32; Matt. vii. 7-11 with Luke xi. 9-13). Again, the address to the Twelve in Mark vi. 7-11, which in Matthew is combined with an address to disciples, from the Logian document, is connected by Luke with the sending out of seventy disciples (Luke x. 1-16). Our first evangelist has also added here various other sayings (Matt. x. 17-39, 42). Again, with the Marcan account of the charge of collusion with Satan and Christ’s reply (Mark iii. 22-30), the first evangelist (xii. 24-45) combines the parallel account in the Logian document and adds Christ’s reply to another attack (Luke xi. 14-16, 17-26, 29-32). These are some examples. He has in all in this manner constructed eight discourses or collections of sayings, into which the greater part of Christ’s teaching is gathered: (1) On the character of the heirs of the kingdom (v.-vii.); (2) The Mission address (x.); (3) Teaching suggested by the message of John the Baptist (xi.); (4) The reply to an accusation and a challenge (xii. 22-45); (5) The teaching by parables (xiii.); (6) On offences (xviii.); (7) Concerning the Scribes and Pharisees (xxiii.); (8) On the Last Things (xxiv., xxv.). In this arrangement of his material the writer has in many instances disregarded chronological considerations. But his documents also gave only very imperfect indications of the occasions of many of the utterances; and the result of his method of procedure has been to give us an exceedingly effective representation of the teaching of Jesus.
In the concluding verses of the Gospel, where the original Marcan parallel is wanting, the evangelist may still have followed in part that document while making additions as before. The account of the silencing of the Roman guard by the chief priests is the sequel to the setting of this guard and their presence at the Resurrection, which at an earlier point arc peculiar to Matthew (xxvii. 62-66, xxviii. 4). And, further, this matter seems to belong to the same cycle of tradition as the story of Pilate’s wife and his throwing the guilt of the Crucifixion of Jesus upon the Jews, and the testimony borne by the Roman guard (as well as the centurion) who kept watch by the cross (xxvii. 15-26, 54), all which also are peculiar to this Gospel. It cannot but seem probable that these are legendary additions which had arisen through the desire to commend the Gospel to the Romans.
On the other hand, the meeting of Jesus with the disciples in Galilee (Matt. xxviii. 16 seq.) is the natural sequel to the message to them related in Mark xvi. 7, as well as in Matt, xxviii. 7. Again, the commission to them to preach throughout the world is supported by Luke xxiv. 47, and by the present ending of Mark (xvi. 15), though neither of these mention Galilee as the place where it was given. The baptismal formula in Matt. xxviii. 19, is, however, peculiar, and in view of its non-occurrence in the Acts and Epistles of the New Testament must be regarded as probably an addition in accordance with Church usage at the time the Gospel was written.
3. The Palestinian Element.—Teaching is preserved in this Gospel which would have peculiar interest and be specially required in the home of Judaism. The best examples of this are the passages already referred to near end of § 1, as probably derived from the Logian document. There are, besides, a good many turns of expression and sayings peculiar to this Gospel which have a Semitic cast, or which suggest a point of view that would be natural to Palestinian Christians, e.g. “kingdom of heaven” frequently for “kingdom of God”; xiii. 52 (“every scribe”); xxiv. 20 (“neither on a Sabbath”). See also v. 35 and xix. 9; x. 5, 23. Again, several of the quotations which are peculiar to this Gospel are not taken from the LXX., as those in the other Gospels and in the corresponding contexts in this Gospel commonly are, but are wholly or partly independent renderings from the Hebrew (ii. 6, 15, 18; viii. 17, xii. 17-21, &c.). Once more, there is somewhat more parallelism between the fragments of the Gospel according to the Hebrews and this Gospel than is the case with Luke, not to say Mark.
4. Doctrinal Character.—In this Gospel, more decidedly than in either of the other two Synoptics, there is a doctrinal point of view from which the whole history is regarded. Certain aspects which are of profound significance are dwelt upon, and this without there being any great difference between this Gospel and the two other Synoptics in respect to the facts recorded or the beliefs implied. The effect is produced partly by the comments of the evangelist, which especially take the form of citations from the Old Testament; partly by the frequency with which certain expressions are used, and the prominence that is given in this and other ways to particular traits and topics.
He sets forth the restriction of the mission of Jesus during His life on earth to the people of Israel in a way which suggests at first sight a spirit of Jewish exclusiveness. But there are various indications that this is not the true explanation. In particular the evangelist brings out more strongly than either Mark or Luke the national rejection of Jesus, while the Gospel ends with the commission of Jesus to His disciples after His resurrection to “make disciples of all the peoples.” One may divine in all this an intention to “justify the ways of God” to the Jew, by proving that God in His faithfulness to His ancient people had given them the first opportunity of salvation through Christ, but that now their national privilege had been rightly forfeited. He was also specially concerned to show that prophecy is fulfilled in the life and work of Jesus, but the conception of this fulfilment which is presented to us is a large one; it is to be seen not merely in particular events or features of Christ’s ministry, but in the whole new dispensation, new relations between God and men, and new rules of conduct which Christ has introduced. The divine meaning of the work of Jesus is thus made apparent, while of the majesty and glory of His person a peculiarly strong impression is conveyed.
Some illustrations in detail of these points are subjoined. Where there are parallels in the other Gospels they should be compared and the words in Matthew noted which in many instances serve to emphasize the points in question.
(a) The Ministry of Jesus among the Jewish People as their promised Messiah, their rejection of Him, and the extension of the Gospel to the Gentiles. The mission to Israel: Matt. i. 21; iv. 23 (note in these passages the use of ὁ λαός, which here, as generally in Matthew, denotes the chosen nation), ix. 33, 35, xv. 31. For the rule limiting 898 the work of Jesus while on earth see xv. 24 (and note ἰξελθοῦσα in verse 22, which implies that Jesus had not himself entered the heathen borders), and for a similar rule prescribed to the disciples, x. 5, 6 and 23.
The rejection of Jesus by the people in Galilee, xi. 21; xiii. 13-15, and by the heads of “the nation,” xxvi. 3, 47 and by “the whole nation,” xxvii. 25; their condemnation xxiii. 38.
Mercy to the Gentiles and the punishment of “the sons of the kingdom” is foretold viii. 11, 12. The commission to go and convert Gentile peoples (ἔθνη) is given after Christ’s resurrection (xxviii. 19).
(b) The Fulfilment of Prophecy.—In the birth and childhood of Jesus, i. 23; ii. 6, 15, 18, 23. By these citations attention is drawn to the lowliness of the beginnings of the Saviour’s life, the unexpected and secret manner of His appearing, the dangers to which from the first He was exposed and from which He escaped.
The ministry of Christ’s forerunner, iii. 3. (The same prophecy, Isa. xl. 3, is also quoted in the other Gospels.)
The ministry of Jesus. The quotations serve to bring out the significance of important events, especially such as were turning-points, and also to mark the broad features of Christ’s life and work, iv. 15, 16; viii. 17; xii. 18 seq.; xiii. 35; xxi. 5; xxvii. 9.
(c) The Teaching on the Kingdom of God.—Note the collection of parables “of the Kingdom” in xiii.; also the use of ἡ βασιλεία (“the Kingdom”) without further definition as a term the reference of which could not be misunderstood, especially in the following phrases peculiar to this Gospel: τὁ εὐαγγέλιον τῆς βασιλείας (“the Gospel of the Kingdom”) iv. 23, ix. 35, xxiv. 14; and ὁ λόγος τῆς βασιλείας (“the word of the kingdom”) xiii. 19. The following descriptions of the kingdom, peculiar to this Gospel, are also interesting ἡ βασιλεία τοῦ πατρὁς αὐτῶν (“the kingdom of their father”) xiii. 43 and τοῦ πατρός μου(“of my father”) xxvi. 29.
(d) The Relation of the New Law to the Old.—Verses 17-48, cf. also, addition at xxii. 40 and xix. 19b. Further, his use of δικαιοσύνη (“righteousness”) and δίκαιος(“righteous”) (specially frequent in this Gospel) is such as to connect the New with the Old; the standard in mind is the law which “fulfilled” that previously given.
(e) The Christian Ecclesia.—Chap. xvi. 18, xviii. 17.
(f) The Messianic Dignity and Glory of Jesus.—The narrative in i. and ii. show the royalty of the new-born child. The title “Son of David” occurs with special frequency in this Gospel. The following instances are without parallels in the other Gospels: ix. 27; xii. 23; xv. 22; xxi. 9; xxi. 15. The title “Son of God” is also used with somewhat greater frequency than in Mark and Luke: ii. 15; xiv. 33; xvi. 16; xxii. 2 seq. (where it is implied); xxvii. 40, 43.
The thought of the future coming of Christ, and in particular of the judgment to be executed by Him then, is much more prominent in this Gospel than in the others. Some of the following predictions are peculiar to it, while in several others there are additional touches: vii. 22, 23; x. 23, 32, 33; xiii. 39-43; xvi. 27, 28; xix. 28; xxiv. 3, 27, 30, 31, 37, 39; xxv. 31-46; xxvi. 64.
The majesty of Christ is also impressed upon us by the signs at His crucifixion, some of which are related only in this Gospel, xxvii. 51-53, and by the sublime vision of the Risen Christ at the close, xxviii. 16-20.
(5) Time of Composition and Readers addressed.—The signs of dogmatic reflection in this Gospel point to its having been composed somewhat late in the 1st century, probably after Luke’s Gospel, and this is in accord with the conclusion that some insertions had been made in the Marcan document used by this evangelist which were not in that used by Luke (see Luke, Gospel of St). We may assign A.D. 80-100 as a probable time for the composition.
The author was in all probability a Jew by race, and he would seem to have addressed himself especially to Jewish readers; but they were Jews of the Dispersion. For although he was in specially close touch with Palestine, either personally or through the sources at his command, or both, his book was composed in Greek by the aid of Greek documents.
See commentaries by Th. Zahn (1903) and W. C. Allen (in the series of International Critical Commentaries, 1907); also books on the Four Gospels or the Synoptic Gospels cited at the end of Gospel.
MATTHEW CANTACUZENUS, Byzantine emperor, was the son of John VI. Cantacuzenus (q.v.). In return for the support he gave to his father during his struggle with John V. he was allowed to annex part of Thrace under his own dominion and in 1353 was proclaimed joint emperor. From his Thracian principality he levied several wars against the Servians. An attack which he prepared in 1350 was frustrated by the defection of his Turkish auxiliaries. In 1357 he was captured by his enemies, who delivered him to the rival emperor, John V. Compelled to abdicate, he withdrew to a monastery, where he busied himself with writing commentaries on the Scriptures.
MATTHEW OF PARIS (d. 1259), English monk and chronicler known to us only through his voluminous writings. In spite of his surname, and of his knowledge of the French language, his attitude towards foreigners attests that he was of English birth. He may have studied at Paris in his youth, but the earliest fact which he records of himself is his admission as a monk at St Albans in the year 1217. His life was mainly spent in this religious house. In 1248, however, he was sent to Norway as the bearer of a message from Louis IX. of France to Haakon VI.; he made himself so agreeable to the Norwegian sovereign that he was invited, a little later, to superintend the reformation of the Benedictine monastery of St Benet Holme at Trondhjem. Apart from these missions, his activities were devoted to the composition of history, a pursuit for which the monks of St Albans had long been famous. Matthew edited anew the works of Abbot John de Cella and Roger of Wendover, which in their altered form constitute the first part of his most important work, the Chronica majora. From 1235, the point at which Wendover dropped his pen, Matthew continued the history on the plan which his predecessors had followed. He derived much of his information from the letters of important personages, which he sometimes inserts, but much more from conversation with the eye-witnesses of events. Among his informants were Earl Richard of Cornwall and Henry III. With the latter he appears to have been on terms of intimacy. The king knew that Matthew was writing a history, and showed some anxiety that it should be as exact as possible. In 1257, in the course of a week’s visit to St Albans, Henry kept the chronicler beside him night and day, “and guided my pen,” says Paris, “with much good will and diligence.” It is therefore curious that the Chronica majora should give so unfavourable an account of the king’s policy. Luard supposes that Matthew never intended his work to see the light in its present form, and many passages of the autograph have against them the note offendiculum, which shows that the writer understood the danger which he ran. On the other hand, unexpurgated copies were made in Matthew’s lifetime; though the offending passages are duly omitted or softened in his abridgment of his longer work, the Historia Anglorum (written about 1253), the real sentiments of the author must have been an open secret. In any case there is no ground for the old theory that he was an official historiographer.
Matthew Paris was unfortunate in living at a time when English politics were peculiarly involved and tedious. His talent is for narrative and description. Though he took a keen interest in the personal side of politics he has no claim to be considered a judge of character. His appreciations of his contemporaries throw more light on his own prejudices than on their aims and ideas. His work is always vigorous, but he imputes motives in the spirit of a partisan who never pauses to weigh the evidence or to take a comprehensive view of the situation. His redeeming feature is his generous admiration for strength of character, even when it goes along with a policy of which he disapproves. Thus he praises Grosseteste, while he denounces Grosseteste’s scheme of monastic reform. Matthew is a vehement supporter of the monastic orders against their rivals, the secular clergy and the mendicant friars. He is violently opposed to the court and the foreign favourites. He despises the king as a statesman, though for the man he has some kindly feeling. The frankness with which he attacks the court of Rome for its exactions is remarkable; so, too, is the intense nationalism which he displays in dealing with this topic. His faults of presentment are more often due to carelessness and narrow views than to deliberate purpose. But he is sometimes guilty of inserting rhetorical speeches which are not only fictitious, but also misleading as an account of the speaker’s sentiments. In other cases he tampers with the documents which he inserts (as, for instance, with the text of Magna Carta). His chronology is, for a contemporary, inexact; and he occasionally inserts duplicate versions of the same incident in different places. Hence he must always be rigorously checked where other authorities exist and used with caution where he is our sole informant. None the less, he gives a more vivid impression of his age than any other English chronicler; and it is a matter for regret that his great history breaks off in 1259, on the eve of the crowning struggle between Henry III and the baronage.
Authorities.—The relation of Matthew Paris’s work to those of John de Cella and Roger of Wendover may best be studied in H. R. Luard’s edition of the Chronica majora (7 vols., Rolls series, 1872-1883), which contains valuable prefaces. The Historia 899 Anglorum sive historia minor (1067-1253) has been edited by F. Madden (3 vols., Rolls series, 1866-1869). Matthew Paris is often confused with “Matthew of Westminster,” the reputed author of the Flores historiarum edited by H. R. Luard (3 vols., Rolls series, 1890). This work, compiled by various hands, is an edition of Matthew Paris, with continuations extending to 1326. Matthew Paris also wrote a life of Edmund Rich (q.v.), which is probably the work printed in W. Wallace’s St Edmund of Canterbury (London, 1893) pp. 543-588, though this is attributed by the editor to the monk Eustace; Vitae abbatum S Albani (up to 1225) which have been edited by W. Watts (1640, &c.); and (possibly) the Abbreviatio chronicorum (1000-1255), edited by F. Madden, in the third volume of the Historia Anglorum. On the value of Matthew as an historian see F. Liebermann in G. H. Pertz’s Scriptores xxviii. pp. 74-106; A. Jessopp’s Studies by a Recluse (London, 1893); H. Plehn’s Politische Character Matheus Parisiensis (Leipzig, 1897).
MATTHEW OF WESTMINSTER, the name of an imaginary person who was long regarded as the author of the Flores Historiarum. The error was first discovered in 1826 by Sir F. Palgrave, who said that Matthew was “a phantom who never existed,” and later the truth of this statement was completely proved by H. R. Luard. The name appears to have been taken from that of Matthew of Paris, from whose Chronica majora the earlier part of the work was mainly copied, and from Westminster, the abbey in which the work was partially written.
The Flores historiarum is a Latin chronicle dealing with English history from the creation to 1326, although some of the earlier manuscripts end at 1306; it was compiled by various persons, and written partly at St Albans and partly at Westminster. The part from 1306 to 1326 was written by Robert of Reading (d. 1325) and another Westminster monk. Except for parts dealing with the reign of Edward I. its value is not great. It was first printed by Matthew Parker, archbishop of Canterbury, in 1567, and the best edition is the one edited with introduction by H. R. Luard for the Rolls series (London, 1890). It has been translated into English by C. D. Yonge (London, 1853). See Luard’s introduction, and C. Bémont in the Revue critique d’histoire (Paris, 1891).
MATTHEWS, STANLEY (1824-1889), American jurist, was born in Cincinnati, Ohio, on the 21st of July 1824. He graduated from Kenyon College in 1840, studied law, and in 1842 was admitted to the bar of Maury county, Tennessee. In 1844 he became assistant prosecuting attorney of Hamilton county, Ohio; and in 1846-1849 edited a short-lived anti-slavery paper, the Cincinnati Herald. He was clerk of the Ohio House of Representatives in 1848-1849, a judge of common pleas of Hamilton county in 1850-1853, state senator in 1856-1858, and U.S. district-attorney for the southern district of Ohio in 1858-1861. First a Whig and then a Free-Soiler, he joined the Republican party in 1861. After the outbreak of the Civil War he was commissioned a lieutenant of the 23rd Ohio, of which Rutherford B. Hayes was major; but saw service only with the 57th Ohio, of which he was colonel, and with a brigade which he commanded in the Army of the Cumberland. He resigned from the army in 1863, and was judge of the Cincinnati superior court in 1863-1864. He was a Republican presidential elector in 1864 and 1868. In 1872 he joined the Liberal Republican movement, and was temporary chairman of the Cincinnati convention which nominated Horace Greeley for the presidency, but in the campaign he supported Grant. In 1877, as counsel before the Electoral Commission, he opened the argument for the Republican electors of Florida and made the principal argument for the Republican electors of Oregon. In March of the same year he succeeded John Sherman as senator from Ohio, and served until March 1879. In 1881 President Hayes nominated him as associate justice of the Supreme Court, to succeed Noah H. Swayne; there was much opposition, especially in the press, to this appointment, because Matthews had been a prominent railway and corporation lawyer and had been one of the Republican “visiting statesmen” who witnessed the canvass of the vote of Louisiana1 in 1876; and the nomination had not been approved when the session of Congress expired. Matthews was renominated by President Garfield on the 15th of March, and the nomination was confirmed by the Senate (22 for, 21 against) on the 12th of May. He was an honest, impartial and conscientious judge. He died in Washington, on the 22nd of March 1889.
1 It seems certain that Matthews and Charles Foster of Ohio gave their written promise that Hayes, if elected, would recognize the Democratic governors in Louisiana and South Carolina.
MATTHIAE, AUGUST HEINRICH (1769-1835), German classical scholar, was born at Göttingen, on the 25th of December 1769, and educated at the university. He then spent some years as a tutor in Amsterdam. In 1798 he returned to Germany, and in 1802 was appointed director of the Friedrichsgymnasium at Altenburg, which post he held till his death, on the 6th of January 1835. Of his numerous important works the best-known are his Greek Grammar (3rd ed., 1835), translated into English by E. V. Blomfield (5th ed., by J. Kenrick, 1832), his edition of Euripides (9 vols., 1813-1829), Grundriss der Geschichte der griechischen und römischen Litteratur (3rd ed., 1834, Eng. trans., Oxford, 1841) Lehrbuch für den ersten Unterricht in der Philosophie (3rd ed., 1833), Encyklopädie und Methodologie der Philologie (1835). His Life was written by his son Constantin (1845).
His brother, Friedrich Christian Matthiae (1763-1822), rector of the Frankfort gymnasium, published valuable editions of Seneca’s Letters, Aratus, and Dionysius Periegetes.
MATTHIAS, the disciple elected by the primitive Christian community to fill the place in the Twelve vacated by Judas Iscariot (Acts i. 21-26). Nothing further is recorded of him in the New Testament. Eusebius (Hist. Eccl., I. xii.) says he was, like his competitor, Barsabas Justus, one of the seventy, and the Syriac version of Eusebius calls him throughout not Matthias but Tolmai, i.e. Bartholomew, without confusing him with the Bartholomew who was originally one of the Twelve, and is often identified with the Nathanael mentioned in the Fourth Gospel (Expository Times, ix. 566). Clement of Alexandria says some identified him with Zacchaeus, the Clementine Recognitions identify him with Barnabas, Hilgenfeld thinks he is the same as Nathanael.
Various works—a Gospel, Traditions and Apocryphal Words—were ascribed to him; and there is also extant The Acts of Andrew and Matthias, which places his activity in “the city of the cannibals” in Ethiopia. Clement of Alexandria quotes two sayings from the Traditions: (1) Wonder at the things before you (suggesting, like Plato, that wonder is the first step to new knowledge); (2) If an elect man’s neighbour sin, the elect man has sinned.
MATTHIAS (1557-1619), Roman emperor, son of the emperor Maximilian II. and Maria, daughter of the emperor Charles V., was born in Vienna, on the 24th of February 1557. Educated by the diplomatist O. G. de Busbecq, he began his public life in 1577, soon after his father’s death, when he was invited to assume the governorship of the Netherlands, then in the midst of the long struggle with Spain. He eagerly accepted this invitation, although it involved a definite breach with his Spanish kinsman, Philip II., and entering Brussels in January 1578 was named governor-general; but he was merely a cipher, and only held the position for about three years, returning to Germany in October 1581. Matthias was appointed governor of Austria in 1593 by his brother, the emperor Rudolph II.; and two years later, when another brother, the archduke Ernest, died, he became a person of more importance as the eldest surviving brother of the unmarried emperor. As governor of Austria Matthias continued the policy of crushing the Protestants, although personally he appears to have been inclined to religious tolerance; and he dealt with the rising of the peasants in 1595, in addition to representing Rudolph at the imperial diets, and gaining some fame as a soldier during the Turkish War. A few years later the discontent felt by the members of the Habsburg family at the incompetence of the emperor became very acute, and the lead was taken by Matthias. Obtaining in May 1605 a reluctant consent from his brother, he took over the conduct of affairs in Hungary, where a revolt had broken out, and was formally recognized by the Habsburgs as their head in April 1606, and was promised the succession to the Empire. In June 1606 he concluded the peace of Vienna with the rebellious Hungarians, and was thus in a better position to treat with the sultan, with whom peace was made in November. This pacific policy was displeasing to Rudolph, who prepared to renew the Turkish War; but having secured the support of the national party in Hungary and gathered an army, Matthias forced his brother to cede to him this 900 kingdom, together with Austria and Moravia, both of which had thrown in their lot with Hungary (1608). The king of Hungary, as Matthias now became, was reluctantly compelled to grant religious liberty to the inhabitants of Austria. The strained relations which had arisen between Rudolph and Matthias as a result of these proceedings were temporarily improved, and a formal reconciliation took place in 1610; but affairs in Bohemia soon destroyed this fraternal peace. In spite of the letter of majesty (Majestätsbrief) which the Bohemians had extorted from Rudolph, they were very dissatisfied with their ruler, whose troops were ravaging their land; and in 1611 they invited Matthias to come to their aid. Accepting this invitation, he inflicted another humiliation upon his brother, and was crowned king of Bohemia in May 1611. Rudolph, however, was successful in preventing the election of Matthias as German king, or king of the Romans, and when he died, in January 1612, no provision had been made for a successor. Already king of Hungary and Bohemia, however, Matthias obtained the remaining hereditary dominions of the Habsburgs, and in June 1612 was crowned emperor, although the ecclesiastical electors favoured his younger brother, the archduke Albert (1559-1621).
The short reign of the new emperor was troubled by the religious dissensions of Germany. His health became impaired and his indolence increased, and he fell completely under the influence of Melchior Klesl (q.v.), who practically conducted the imperial business. By Klesl’s advice he took up an attitude of moderation and sought to reconcile the contending religious parties; but the proceedings at the diet of Regensburg in 1613 proved the hopelessness of these attempts, while their author was regarded with general distrust. Meanwhile the younger Habsburgs, led by the emperor’s brother, the archduke Maximilian, and his cousin, Ferdinand, archduke of Styria, afterwards the emperor Ferdinand II., disliking the peaceful policy of Klesl, had allied themselves with the unyielding Roman Catholics, while the question of the imperial succession was forcing its way to the front. In 1611 Matthias had married his cousin Anna (d. 1618), daughter of the archduke Ferdinand (d. 1595), but he was old and childless and the Habsburgs were anxious to retain his extensive possessions in the family. Klesl, on the one hand, wished the settlement of the religious difficulties to precede any arrangement about the imperial succession; the Habsburgs, on the other, regarded the question of the succession as urgent and vital. Meanwhile the disputed succession to the duchies of Cleves and Jülich again threatened a European war; the imperial commands were flouted in Cologne and Aix-la-Chapelle, and the Bohemians were again becoming troublesome. Having decided that Ferdinand should succeed Matthias as emperor, the Habsburgs had secured his election as king of Bohemia in June 1617, but were unable to stem the rising tide of disorder in that country. Matthias and Klesl were in favour of concessions, but Ferdinand and Maximilian met this move by seizing and imprisoning Klesl. Ferdinand had just secured his coronation as king of Hungary when there broke out in Bohemia those struggles which heralded the Thirty Years’ War; and on the 20th of March 1619 the emperor died at Vienna.
For the life and reign of Matthias the following works may be consulted: J. Heling, Die Wahl des römischen Königs Matthias (Belgrade, 1892); A. Gindely, Rudolf II. und seine Zeit (Prague, 1862-1868); F. Stieve, Die Verhandlungen über die Nachfolge Kaisers Rudolf II. (Munich, 1880); P. von Chlumecky, Karl von Zierotin und seine Zeit (Brünn, 1862-1879); A. Kerschbaumer, Kardinal Klesel (Vienna, 1865); M. Ritter, Quellenbeiträge zur Geschichte des Kaisers Rudolf II. (Munich, 1872); Deutsche Geschichte im Zeitalter der Gegenreformation und des dreissigjährigen Krieges (Stuttgart, 1887, seq.); and the article on Matthias in the Allgemeine deutsche Biographie, Bd. XX. (Leipzig, 1884); L. von Ranke, Zur deutschen Geschichte vom Religionsfrieden bis zum 30-jährigen Kriege (Leipzig, 1888); and J. Janssen, Geschichte des deutschen Volks seit dem Ausgang des Mittelalters (Freiburg, 1878 seq.), Eng. trans. by M. A. Mitchell and A. M. Christie (London, 1896, seq.).
MATTHIAS I., HUNYADI (1440-1490), king of Hungary, also known as Matthias Corvinus, a surname which he received from the raven (corvus) on his escutcheon, second son of János Hunyadi and Elizabeth Szilágyi, was born at Kolozsvár, probably on
the 23rd of February 1440. His tutors were the learned János Vitéz, bishop of Nagyvárad, whom he subsequently raised to the primacy, and the Polish humanist Gregory Sanocki. The precocious lad quickly mastered the German, Latin and principal Slavonic languages, frequently acting as his father’s interpreter at the reception of ambassadors. His military training proceeded under the eye of his father, whom he began to follow on his campaigns when only twelve years of age. In 1453 he was created count of Bistercze, and was knighted at the siege of Belgrade in 1454. The same care for his welfare led his father to choose him a bride in the powerful Cilli family, but the young Elizabeth died before the marriage was consummated, leaving Matthias a widower at the age of fifteen. On the death of his father he was inveigled to Buda by the enemies of his house, and, on the pretext of being concerned in a purely imaginary conspiracy against Ladislaus V., was condemned to decapitation, but was spared on account of his youth, and on the king’s death fell into the hands of George Poděbrad, governor of Bohemia, the friend of the Hunyadis, in whose interests it was that a national king should sit on the Magyar throne. Poděbrad treated Matthias hospitably and affianced him with his daughter Catherine, but still detained him, for safety’s sake, in Prague, even after a Magyar deputation had hastened thither to offer the youth the crown. Matthias was the elect of the Hungarian people, gratefully mindful of his father’s services to the state and inimical to all foreign candidates; and though an influential section of the magnates, headed by the palatine László Garai and the voivode of Transylvania, Miklós Ujlaki, who had been concerned in the judicial murder of Matthias’s brother László, and hated the Hunyadis as semi-foreign upstarts, were fiercely opposed to Matthias’s election, they were not strong enough to resist the manifest wish of the nation, supported as it was by Matthias’s uncle Mihály Szilágyi at the head of 15,000 veterans. On the 24th of January 1458, 40,000 Hungarian noblemen, assembled on the ice of the frozen Danube, unanimously elected Matthias Hunyadi king of Hungary, and on the 14th of February the new king made his state entry into Buda.
The realm at this time was environed by perils. The Turks and the Venetians threatened it from the south, the emperor Frederick III. from the west, and Casimir IV. of Poland from the north, both Frederick and Casimir claiming the throne. The Czech mercenaries under Giszkra held the northern counties and from thence plundered those in the centre. Meanwhile Matthias’s friends had only pacified the hostile dignitaries by engaging to marry the daughter of the palatine Garai to their nominee, whereas Matthias not unnaturally refused to marry into the family of one of his brother’s murderers, and on the 9th of February confirmed his previous nuptial contract with the daughter of George Poděbrad, who shortly afterwards was elected king of Bohemia (March 2, 1458). Throughout 1458 the struggle between the young king and the magnates, reinforced by Matthias’s own uncle and guardian Szilágyi, was acute. But Matthias, who began by deposing Garai and dismissing Szilágyi, and then proceeded to levy a tax, without the consent of the Diet, in order to hire mercenaries, easily prevailed. Nor did these complications prevent him from recovering the fortress of Galamboc from the Turks, successfully invading Servia, and reasserting the suzerainty of the Hungarian crown over Bosnia. In the following year there was a fresh rebellion, when the emperor Frederick was actually crowned king by the malcontents at Vienna-Neustadt (March 4, 1459); but Matthias drove him out, and Pope Pius II. intervened so as to leave Matthias free to engage in a projected crusade against the Turks, which subsequent political complications, however, rendered impossible. From 1461 to 1465 the career of Matthias was a perpetual struggle punctuated by truces. Having come to an understanding with his father-in-law Poděbrad, he was able to turn his arms against the emperor Frederick, and in April 1462 Frederick restored the holy crown for 60,000 ducats and was allowed to retain certain Hungarian counties with the title of king; in return for which concessions, extorted from Matthias by the necessity of coping with a simultaneous rebellion of the Magyar noble 901 in league with Poděbrad’s son Victorinus, the emperor recognized Matthias as the actual sovereign of Hungary. Only now was Matthias able to turn against the Turks, who were again threatening the southern provinces. He began by defeating Ali Pasha, and then penetrated into Bosnia, and captured the newly built fortress of Jajce after a long and obstinate defence (Dec. 1463). On returning home he was crowned with the holy crown on the 29th of March 1464, and, after driving the Czechs out of his northern counties, turned southwards again, this time recovering all the parts of Bosnia which still remained in Turkish hands.
A political event of the first importance now riveted his attention upon the north. Poděbrad, who had gained the throne of Bohemia with the aid of the Hussites and Utraquists, had long been in ill odour at Rome, and in 1465 Pope Paul II. determined to depose the semi-Catholic monarch. All the neighbouring princes, the emperor, Casimir IV. of Poland and Matthias, were commanded in turn to execute the papal decree of deposition, and Matthias gladly placed his army at the disposal of the Holy See. The war began on the 31st of May 1468, but, as early as the 27th of February 1469, Matthias anticipated an alliance between George and Frederick by himself concluding an armistice with the former. On the 3rd of May the Czech Catholics elected Matthias king of Bohemia, but this was contrary to the wishes of both pope and emperor, who preferred to partition Bohemia. But now George discomfited all his enemies by suddenly excluding his own son from the throne in favour of Ladislaus, the eldest son of Casimir IV., thus skilfully enlisting Poland on his side. The sudden death of Poděbrad on the 22nd of March 1471 led to fresh complications. At the very moment when Matthias was about to profit by the disappearance of his most capable rival, another dangerous rebellion, headed by the primate and the chief dignitaries of the state, with the object of placing Casimir, son of Casimir IV., on the throne, paralysed Matthias’s foreign policy during the critical years 1470-1471. He suppressed this domestic rebellion indeed, but in the meantime the Poles had invaded the Bohemian domains with 60,000 men, and when in 1474 Matthias was at last able to take the field against them in order to raise the siege of Breslau, he was obliged to fortify himself in an entrenched camp, whence he so skilfully harried the enemy that the Poles, impatient to return to their own country, made peace at Breslau (Feb. 1475) on an uti possidetis basis, a peace subsequently confirmed by the congress of Olmütz (July 1479). During the interval between these peaces, Matthias, in self-defence, again made war on the emperor, reducing Frederick to such extremities that he was glad to accept peace on any terms. By the final arrangement made between the contending princes, Matthias recognized Ladislaus as king of Bohemia proper in return for the surrender of Moravia, Silesia and Upper and Lower Lusatia, hitherto component parts of the Czech monarchy, till he should have redeemed them for 400,000 florins. The emperor promised to pay Matthias 100,000 florins as a war indemnity, and recognized him as the legitimate king of Hungary on the understanding that he should succeed him if he died without male issue, a contingency at this time somewhat improbable, as Matthias, only three years previously (Dec. 15, 1476), had married his third wife, Beatrice of Naples, daughter of Ferdinand of Aragon.
The endless tergiversations and depredations of the emperor speedily induced Matthias to declare war against him for the third time (1481), the Magyar king conquering all the fortresses in Frederick’s hereditary domains. Finally, on the 1st of June 1485, at the head of 8000 veterans, he made his triumphal entry into Vienna, which he henceforth made his capital. Styria, Carinthia and Carniola were next subdued, and Trieste was only saved by the intervention of the Venetians. Matthias consolidated his position by alliances with the dukes of Saxony and Bavaria, with the Swiss Confederation, and the archbishop of Salzburg, and was henceforth the greatest potentate in central Europe. His far-reaching hand even extended to Italy. Thus, in 1480, when a Turkish fleet seized Otranto, Matthias, at the earnest solicitation of the pope, sent Balasz Magyar to recover the fortress, which surrendered to him on the 10th of May 1481. Again in 1488, Matthias took Ancona under his protection for a time and occupied it with a Hungarian garrison.
Though Matthias’s policy was so predominantly occidental that he soon abandoned his youthful idea of driving the Turks out of Europe, he at least succeeded in making them respect Hungarian territory. Thus in 1479 a huge Turkish army, on its return home from ravaging Transylvania, was annihilated at Szászváros (Oct. 13), and in 1480 Matthias recaptured Jajce, drove the Turks from Servia and erected two new military banates, Jajce and Srebernik, out of reconquered Bosnian territory. On the death of Mahommed II. in 1481, a unique opportunity for the intervention of Europe in Turkish affairs presented itself. A civil war ensued in Turkey between his sons Bayezid and Jem, and the latter, being worsted, fled to the knights of Rhodes, by whom he was kept in custody in France (see Bayezid II.). Matthias, as the next-door neighbour of the Turks, claimed the custody of so valuable a hostage, and would have used him as a means of extorting concessions from Bayezid. But neither the pope nor the Venetians would hear of such a transfer, and the negotiations on this subject greatly embittered Matthias against the Curia. The last days of Matthias were occupied in endeavouring to secure the succession to the throne for his illegitimate son János (see Corvinus, János); but Queen Beatrice, though childless, fiercely and openly opposed the idea and the matter was still pending when Matthias, who had long been crippled by gout, expired very suddenly on Palm Sunday, the 4th of April 1490.
Matthias Hunyadi was indisputably the greatest man of his day, and one of the greatest monarchs who ever reigned. The precocity and universality of his genius impress one the most. Like Napoleon, with whom he has often been compared, he was equally illustrious as a soldier, a statesman, an orator, a legislator and an administrator. But in all moral qualities the brilliant adventurer of the 15th was infinitely superior to the brilliant adventurer of the 19th century. Though naturally passionate, Matthias’s self-control was almost superhuman, and throughout his stormy life, with his innumerable experiences of ingratitude and treachery, he never was guilty of a single cruel or vindictive action. His capacity for work was inexhaustible. Frequently half his nights were spent in reading, after the labour of his most strenuous days. There was no branch of knowledge in which he did not take an absorbing interest, no polite art which he did not cultivate and encourage. His camp was a school of chivalry, his court a nursery of poets and artists. Matthias was a middle-sized, broad-shouldered man of martial bearing, with a large fleshy nose, hair reaching to his heels, and the clean-shaven, heavy chinned face of an early Roman emperor.
See Vilmós Fraknói, King Matthias Hunyadi (Hung., Budapest, 1890, German ed., Freiburg, 1891); Ignácz Acsády, History of the Hungarian Realm (Hung. vol. i., Budapest, 1904); József Teleki, The Age of the Hunyadis in Hungary (Hung., vols. 3-5, Budapest, 1852-1890); V. Fraknói, Life of János Vitéz (Hung. Budapest 1879); Karl Schober, Die Eroberung Niederösterreichs durch Matthias Corvinus (Vienna, 1879); János Huszár, Matthias’s Black Army (Hung. Budapest, 1890); Antonio Bonfini, Rerum hungaricarum decades (7th ed., Leipzig, 1771); Aeneas Sylvius, Opera (Frankfort, 1707); The Correspondence of King Matthias (Hung. and Lat., Budapest, 1893); V. Fraknói, The Embassies of Cardinal Carvajal to Hungary (Hung., Budapest, 1889); Marzio Galeotti, De egregie sapienter et jocose, dictis ac factis Matthiae regis (Script. reg. hung. I.) (Vienna, 1746). Of the above the first is the best general sketch and is rich in notes; the second somewhat chauvinistic but excellently written; the third the best work for scholars; the seventh, eighth and eleventh are valuable as being by contemporaries.
MATTHISSON, FRIEDRICH VON (1761-1831), German poet, was born at Hohendodeleben near Magdeburg, the son of the village pastor, on the 23rd of January 1761. After studying theology and philology at the university of Halle, he was appointed in 1781 master at the classical school Philanthropin in Dessau. This once famous seminary was, however, then rapidly decaying in public favour, and in 1784 Matthisson was glad to accept a travelling tutorship. He lived for two years with the Swiss author Bonstetten at Nyon on the lake of Geneva. 902 In 1794 he was appointed reader and travelling companion to the princess Louisa of Anhalt-Dessau. In 1812 he entered the service of the king of Württemberg, was ennobled, created counsellor of legation, appointed intendant of the court theatre and chief librarian of the royal library at Stuttgart. In 1828 he retired and settled at Wörlitz near Dessau, where he died on the 12th of March 1831. Matthisson enjoyed for a time a great popularity on account of his poems, Gedichte (1787; 15th ed., 1851; new ed., 1876), which Schiller extravagantly praised for their melancholy sweetness and their fine descriptions of scenery. The verse is melodious and the language musical, but the thought and sentiments they express are too often artificial and insincere. His Adelaide has been rendered famous owing to Beethoven’s setting of the song. Of his elegies, Die Elegie in den Ruinen eines alten Bergschlosses is still a favourite. His reminiscences, Erinnerungen (5 vols., 1810-1816), contain interesting accounts of his travels.
Matthisson’s Schriften appeared in eight volumes (1825-1829), of which the first contains his poems, the remainder his Erinnerungen; a ninth volume was added in 1833 containing his biography by H. Döring. His Literarischer Nachlass, with a selection from his correspondence, was published in four volumes by F. R. Schoch in 1832.
MATTING, a general term embracing many coarse woven or plaited fibrous materials used for covering floors or furniture, for hanging as screens, for wrapping up heavy merchandise and for other miscellaneous purposes. In the United Kingdom, under the name of “coir” matting, a large amount of a coarse kind of carpet is made from coco-nut fibre; and the same material, as well as strips of cane, Manila hemp, various grasses and rushes, is largely employed in various forms for making door mats. Large quantities of the coco-nut fibre are woven in heavy looms, then cut up into various sizes, and finally bound round the edges by a kind of rope made from the same material. The mats may be of one colour only, or they may be made of different colours and in different designs. Sometimes the names of institutions are introduced into the mats. Another type of mat is made exclusively from the above-mentioned rope by arranging alternate layers in sinuous and straight paths, and then stitching the parts together. It is also largely used for the outer covering of ships’ fenders. Perforated and otherwise prepared rubber, as well as wire-woven material, are also largely utilized for door and floor mats. Matting of various kinds is very extensively employed throughout India for floor coverings, the bottoms of bedsteads, fans and fly-flaps, &c.; and a considerable export trade in such manufactures is carried on. The materials used are numerous; but the principal substances are straw, the bulrushes Typha elephantina and T. angustifolia, leaves of the date palm (Phoenix sylvestris), of the dwarf palm (Chamaerops Ritchiana), of the Palmyra palm (Borassus flabelliformis), of the coco-nut palm (Cocos nucifera) and of the screw pine (Pandanus odoratissimus), the munja or munj grass (Saccharum Munja) and allied grasses, and the mat grasses Cyperus textilis and C. Pangorei, from the last of which the well-known Palghat mats of the Madras Presidency are made. Many of these Indian grass-mats are admirable examples of elegant design, and the colours in which they are woven are rich, harmonious and effective in the highest degree. Several useful household articles are made from the different kinds of grasses. The grasses are dyed in all shades and plaited to form attractive designs suitable for the purposes to which they are to be applied. This class of work obtains in India, Japan and other Eastern countries. Vast quantities of coarse matting used for packing furniture, heavy and coarse goods, flax and other plants, &c., are made in Russia from the bast or inner bark of the lime tree. This industry centres in the great forest governments of Viatka, Nizhniy-Novgorod, Kostroma, Kazan, Perm and Simbirsk.
MATTOCK (O.E. mattuc, of uncertain origin), a tool having a double iron head, of which one end is shaped like an adze, and the other like a pickaxe. The head has a socket in the centre in which the handle is inserted transversely to the blades. It is used chiefly for grubbing and rooting among tree stumps in plantations and copses, where the roots are too close for the use of a spade, or for loosening hard soil.
MATTO GROSSO, an inland state of Brazil, bounded N. by Amazonas and Pará, E. by Goyaz, Minas Geraes, São Paulo and Paraná, S. by Paraguay and S.W. and W. by Bolivia. It ranks next to Amazonas in size, its area, which is largely unsettled and unexplored, being 532,370 sq. m., and its population only 92,827 in 1890 and 118,025 in 1900. No satisfactory estimate of its Indian population can be made. The greater part of the state belongs to the western extension of the Brazilian plateau, across which, between the 14th and 16th parallels, runs the watershed which separates the drainage basins of the Amazon and La Plata. This elevated region is known as the plateau of Matto Grosso, and its elevations so far as known rarely exceed 3000 ft. The northern slope of this great plateau is drained by the Araguaya-Tocantins, Xingú, Tapajos and Guaporé-Mamoré-Madeira, which flow northward, and, except the first, empty into the Amazon; the southern slope drains southward through a multitude of streams flowing into the Paraná and Paraguay. The general elevation in the south part of the state is much lower, and large areas bordering the Paraguay are swampy, partially submerged plains which the sluggish rivers are unable to drain. The lowland elevations in this part of the state range from 300 to 400 ft. above sea-level, the climate is hot, humid and unhealthy, and the conditions for permanent settlement are apparently unfavourable. On the highlands, however, which contain extensive open campos, the climate, though dry and hot, is considered healthy. The basins of the Paraná and Paraguay are separated by low mountain ranges extending north from the sierras of Paraguay. In the north, however, the ranges which separate the river valleys are apparently the remains of the table-land through which deep valleys have been eroded. The resources of Matto Grosso are practically undeveloped, owing to the isolated situation of the state, the costs of transportation and the small population.
The first industry was that of mining, gold having been discovered in the river valleys on the southern slopes of the plateau, and diamonds on the head-waters of the Paraguay, about Diamantino and in two or three other districts. Gold is found chiefly in placers, and in colonial times the output was large, but the deposits were long ago exhausted and the industry is now comparatively unimportant. As to other minerals little is definitely known. Agriculture exists only for the supply of local needs, though tobacco of a superior quality is grown. Cattle-raising, however, has received some attention and is the principal industry of the landowners. The forest products of the state include fine woods, rubber, ipecacuanha, sarsaparilla, jaborandi, vanilla and copaiba. There is little export, however, the only means of communication being down the Paraguay and Paraná rivers by means of subsidized steamers. The capital of the state is Cuyabá, and the chief commercial town is Corumbá at the head of navigation for the larger river boats, and 1986 m. from the mouth of the La Plata. Communication between these two towns is maintained by a line of smaller boats, the distance being 517 m.
The first permanent settlements in Matto Grosso seem to have been made in 1718 and 1719, in the first year at Forquilha and in the second at or near the site of Cuyabá, where rich placer mines had been found. At this time all this inland region was considered a part of São Paulo, but in 1748 it was made a separate capitania and was named Matto Grosso (“great woods”). In 1752 its capital was situated on the right bank of the Guaporé river and was named Villa Bella da Santissima Trindade de Matto Grosso, but in 1820 the seat of government was removed to Cuyabá and Villa Bella has fallen into decay. In 1822 Matto Grosso became a province of the empire and in 1889 a republican state. It was invaded by the Paraguayans in the war of 1860-65.
MATTOON, a city of Coles county, Illinois, U.S.A., in the east central part of the state, about 12 m. south-east of Peoria. Pop. (1890), 6833; (1900), 9622, of whom 430 were foreign-born; (1910 census) 11,456. It is served by the Illinois Central and Cleveland, Cincinnati, Chicago & St Louis railways, which have repair shops here, and by inter-urban electric lines. The 903 city has a public library, a Methodist Episcopal Hospital, and an Old Folks’ Home, the last supported by the Independent Order of Odd Fellows. Mattoon is an important shipping point for Indian corn and broom corn, extensively grown in the vicinity, and for fruit and livestock. Among its manufactures are foundry and machine shop products, stoves and bricks; in 1905 the factory product was valued at $1,308,781, an increase of 71.2% over that in 1900. The municipality owns the waterworks and an electric lighting plant. Mattoon was first settled about 1855, was named in honour of William Mattoon, an early landowner, was first chartered as a city in 1857, and was reorganized under a general state law in 1879.
MATTRESS (O.Fr. materas, mod. matelas; the origin is the Arab. al-materah, cushion, whence Span. and Port. almadraque, Ital. materasso), the padded foundation of a bed, formed of canvas or other stout material stuffed with wool, hair, flock or straw; in the last case it is properly known as a “palliasse” (Fr. paille, straw; Lat. palea); but this term is often applied to an under-mattress stuffed with substances other than straw. The padded mattress on which lay the feather-bed has been replaced by the “wire-mattress,” a network of wire stretched on a light wooden or iron frame, which is either a separate structure or a component part of the bedstead itself. The “wire-mattress” has taken the place of the “spring mattress,” in which spiral springs support the stuffing. The term “mattress” is used in engineering for a mat of brushwood, faggots, &c., corded together and used as a foundation or as surface in the construction of dams, jetties, dikes, &c.
MATURIN, CHARLES ROBERT (1782-1824), Irish novelist and dramatist, was born in Dublin in 1782. His grandfather, Gabriel Jasper Maturin, had been Swift’s successor in the deanery of St Patrick. Charles Maturin was educated at Trinity College, Dublin, and became curate of Loughrea and then of St Peter’s, Dublin. His first novels, The Fatal Revenge; or, the Family of Montorio (1807), The Wild Irish Boy (1808), The Milesian Chief (1812), were issued under the pseudonym of “Dennis Jasper Murphy.” All these were mercilessly ridiculed, but the irregular power displayed in them attracted the notice of Sir Walter Scott, who recommended the author to Byron. Through their influence Maturin’s tragedy of Bertram was produced at Drury Lane in 1816, with Kean and Miss Kelly in the leading parts. A French version by Charles Nodier and Baron Taylor was produced in Paris at the Théâtre Favart. Two more tragedies, Manuel (1817) and Fredolfo (1819), were failures, and his poem The Universe (1821) fell flat. He wrote three more novels, Women (1818), Melmoth, the Wanderer (1820), and The Albigenses (1824). Melmoth, which forms its author’s title to remembrance, is the best of them, and has for hero a kind of “Wandering Jew.” Honoré de Balzac wrote a sequel to it under the title of Melmoth réconcilié à l’église (1835). Maturin died in Dublin on the 30th of October 1824.
MATVYEEV, ARTAMON SERGYEEVICH ( -1682), Russian statesman and reformer, was one of the greatest of the precursors of Peter the Great. His parentage and the date of his birth are uncertain. Apparently his birth was humble, but when the obscure figure of the young Artamon emerges into the light of history we find him equipped at all points with the newest ideas, absolutely free from the worst prejudices of his age, a ripe scholar, and even an author of some distinction. In 1671 the tsar Alexius and Artamon were already on intimate terms, and on the retirement of Orduin-Nashchokin Matvyeev became the tsar’s chief counsellor. It was at his house, full of all the wondrous, half-forbidden novelties of the west, that Alexius, after the death of his first consort, Martha, met Matvyeev’s favourite pupil, the beautiful Natalia Naruishkina, whom he married on the 21st of January 1672. At the end of the year Matvyeev was raised to the rank of okolnichy, and on the 1st of September 1674 attained the still higher dignity of boyar. Matvyeev remained paramount to the end of the reign and introduced play-acting and all sorts of refining western novelties into Muscovy. The deplorable physical condition of Alexius’s immediate successor, Theodore III. suggested to Matvyeev the desirability of elevating to the throne the sturdy little tsarevich Peter, then in his fourth year. He purchased the allegiance of the stryeltsi, or musketeers, and then, summoning the boyars of the council, earnestly represented to them that Theodore, scarce able to live, was surely unable to reign, and urged the substitution of little Peter. But the reactionary boyars, among whom were the near kinsmen of Theodore, proclaimed him tsar and Matvyeev was banished to Pustozersk, in northern Russia, where he remained till Theodore’s death (April 27, 1682). Immediately afterwards Peter was proclaimed tsar by the patriarch, and the first ukaz issued in Peter’s name summoned Matvyeev to return to the capital and act as chief adviser to the tsaritsa Natalia. He reached Moscow on the 15th of May, prepared “to lay down his life for the tsar,” and at once proceeded to the head of the Red Staircase to meet and argue with the assembled stryeltsi, who had been instigated to rebel by the anti-Petrine faction. He had already succeeded in partially pacifying them, when one of their colonels began to abuse the still hesitating and suspicious musketeers. Infuriated, they seized and flung Matvyeev into the square below, where he was hacked to pieces by their comrades.
See R. Nisbet Bain, The First Romanovs (London, 1905); M. P. Pogodin, The First Seventeen Years of the Life of Peter the Great (Rus.), (Moscow, 1875); S. M. Solovev, History of Russia (Rus.), (vols. 12, 13, (St Petersburg, 1895, &c.); L. Shehepotev, A. S. Matvyeev as an Educational and Political Reformer (Rus.), (St Petersburg, 1906).
MAUBEUGE, a town of northern France, in the department of Nord, situated on both banks of the Sambre, here canalized, 231⁄2 m. by rail E. by S. of Valenciennes, and about 2 m. from the Belgian frontier. Pop. (1906), town 13,569, commune 21,520. As a fortress Maubeuge has an old enceinte of bastion trace which serves as the centre of an important entrenched camp of 18 m. perimeter, constructed for the most part after the war of 1870, but since modernized and augmented. The town has a board of trade arbitration, a communal college, a commercial and industrial school; and there are important foundries, forges and blast-furnaces, together with manufactures of machine-tools, porcelain, &c. It is united by electric tramway with Hautmont (pop. 12,473), also an important metallurgical centre.
Maubeuge (Malbodium) owes its origin to a double monastery, for men and women, founded in the 7th century by St Aldegonde relics of whom are preserved in the church. It subsequently belonged to the territory of Hainault. It was burnt by Louis XI., by Francis I., and by Henry II., and was finally assigned to France by the Treaty of Nijmwegen. It was fortified at Vauban by the command of Louis XIV., who under Turenne first saw military service there. Besieged in 1793 by Prince Josias of Coburg, it was relieved by the victory of Wattignies, which is commemorated by a monument in the town. It was unsuccessfully besieged in 1814, but was compelled to capitulate, after a vigorous resistance, in the Hundred Days.
MAUCH CHUNK, a borough and the county-seat of Carbon county, Pennsylvania, U.S.A., on the W. bank of the Lehigh river and on the Lehigh Coal and Navigation Company’s Canal, 46 m. by rail W.N.W. of Easton. Pop. (1800), 4101; (1900), 4029 (571 foreign-born); (1910), 3952. Mauch Chunk is served by the Central of New Jersey railway and, at East Mauch Chunk, across the river, connected by electric railway, by the Lehigh Valley railway. The borough lies in the valley of the Lehigh river, along which runs one of its few streets and in another deeply cut valley at right angles to the river; through this second valley east and west runs the main street, on which is an electric railway; parallel to it on the south is High Street, formerly an Irish settlement; half way up the steep hill, and on the north at the top of the opposite hill is the ward of Upper Mauch Chunk, reached by the electric railway. An incline railway, originally used to transport coal from the mines to the river and named the “Switch-Back,” now carries tourists up the steep slopes of Mount Pisgah and Mount Jefferson, to Summit Hill, a rich anthracite coal region, with a famous “burning mine,” which has been on fire since 1832, and then back. An electric railway to the top of Flagstaff Mountain, built in 1900, was completed in 1901 to Lehighton, 4 m. south-east 904 of Mauch Chunk, where coal is mined and silk and stoves are manufactured, and which had a population in 1900 of 4629, and in 1910 of 5316. Immediately above Mauch Chunk the river forms a horseshoe; on the opposite side, connected by a bridge, is the borough of East Mauch Chunk (pop. 1900, 3458; 1910, 3548); and 2 m. up the river is Glen Onoko, with fine falls and cascades. The principal buildings in Mauch Chunk are the county court house, a county gaol, a Young Men’s Christian Association building, and the Dimmick Memorial Library (1890). The borough was long a famous shipping point for coal. It now has ironworks and foundries, and in East Mauch Chunk there are silk mills. The name is Indian and means “Bear Mountain,” this English name being used for a mountain on the east side of the river. The borough was founded by the Lehigh Coal and Navigation Company in 1818. This company began in 1827 the operation of the “Switch-Back,” probably the first railway in the country to be used for transporting coal. In 1831 the town was opened to individual enterprise, and in 1850 it was incorporated as a borough. Mauch Chunk was for many years the home of Asa Packer, the projector and builder of the Lehigh Valley railroad from Mauch Chunk to Easton.
MAUCHLINE, a town in the division of Kyle, Ayrshire, Scotland. Pop. (1901), 1767. It lies 8 m. E.S.E. of Kilmarnock and 11 m. E. by N. of Ayr by the Glasgow and South-Western railway. It is situated on a gentle slope about 1 m. from the river Ayr, which flows through the south of the parish of Mauchline. It is noted for its manufacture of snuff-boxes and knick-knacks in wood, and of curling-stones. There is also some cabinet-making, besides spinning and weaving, and its horse fairs and cattle markets have more than local celebrity. The parish church, dating from 1829, stands in the middle of the village, and on the green a monument, erected in 1830, marks the spot where five Covenanters were killed in 1685. Robert Burns lived with his brother Gilbert on the farm of Mossgiel, about a mile to the north, from 1784 to 1788. Mauchline kirkyard was the scene of the “Holy Fair”; at “Poosie Nansie’s” (Agnes Gibson’s)—still, though much altered, a popular inn—the “Jolly Beggars” held their high jinks; near the church (in the poet’s day an old, barn-like structure) was the Whiteford Arms inn, where on a pane of glass Burns wrote the epitaph on John Dove, the landlord; “auld Nanse Tinnock’s” house, with the date of 1744 above the door, nearly faces the entrance to the churchyard; the Rev. William Auld was minister of Mauchline, and “Holy Willie,” whom the poet scourged in the celebrated “Prayer,” was one of “Daddy Auld’s” elders; behind the kirkyard stands the house of Gavin Hamilton, the lawyer and firm friend of Burns, in which the poet was married. The braes of Ballochmyle, where he met the heroine of his song, “The Lass o’ Ballochmyle,” lie about a mile to the south-east. Adjoining them is the considerable manufacturing town of Catrine (pop. 2340), with cotton factories, bleach fields and brewery, where Dr Matthew Stewart (1717-1785), the father of Dugald Stewart—had a mansion, and where there is a big water-wheel said to be inferior in size only to that of Laxey in the Isle of Man. Barskimming House, 2 m. south by west of Mauchline, the seat of Lord-President Miller (1717-1789), was burned down in 1882. Near the confluence of the Fail and the Ayr was the scene of Burns’s parting with Highland Mary.
MAUDE, CYRIL (1862- ), English actor, was born in London and educated at Charterhouse. He began his career as an actor in 1883 in America, and from 1896 to 1905 was co-manager with F. Harrison of the Haymarket Theatre, London. There he became distinguished for his quietly humorous acting in many parts. In 1906 he went into management on his own account, and in 1907 opened his new theatre The Playhouse. In 1888 he married the actress Winifred Emery (b. 1862), who had made her London début as a child in 1875, and acted with Irving at the Lyceum between 1881 and 1887. She was a daughter of Samuel Anderson Emery (1817-1881) and granddaughter of John Emery (1777-1822), both well-known actors in their day.
MAULE, a coast province of central Chile, bounded N. by Talea, E. by Linares and Nuble, and S. by Concepción, and lying between the rivers Maule and Itata, which form its northern and southern boundaries. Pop. (1895), 119,791; area, 2475 sq. m. Maule is traversed from north to south by the coast range and its surfaces are much broken. The Buchupureo river flows westward across the province. The climate is mild and healthy. Agriculture and stock-raising are the principal occupations, and hides, cattle, wheat and timber are exported. Transport facilities are afforded by the Maule and the Itata, which are navigable, and by a branch of the government railway from Cauquenes to Parral, an important town of southern Linares. The provincial capital, Cauquenes (pop., in 1895, 8574; 1902 estimate, 9895), is centrally situated on the Buchupureo river, on the eastern slopes of the coast cordilleras. The town and port of Constitución (pop., in 1900, about 7000) on the south bank of the Maule, one mile above its mouth, was formerly the capital of the province. The port suffers from a dangerous bar at the mouth of the river, but is connected with Talca by rail and has a considerable trade.
The Maule river, from which the province takes its name, is of historic interest because it is said to have marked the southern limits of the Inca Empire. It rises in the Laguna del Maule, an Andean lake near the Argentine frontier, 7218 ft. above sea-level, and flows westward about 140 m. to the Pacific, into which it discharges in 35° 18′ S. The upper part of its drainage basin, to which the Anuario Hydrografico gives an area of 8000 sq. m., contains the volcanoes of San Pedro (11,800 ft.), the Descabezado (12,795 ft.), and others of the same group of lower elevations. The upper course and tributaries of the Maule, principally in the province of Linares, are largely used for irrigation.
MAULÉON, SAVARI DE (d. 1236), French soldier, was the son of Raoul de Mauléon, vicomte de Thouars and lord of Mauléon (now Châtillon-sur-Sèvre). Having espoused the cause of Arthur of Brittany, he was captured at Mirebeau (1202), and imprisoned in the château of Corfe. But John set him at liberty in 1204, gained him to his side and named him seneschal of Poitou (1205). In 1211 Savari de Mauléon assisted Raymond VI. count of Toulouse, and with him besieged Simon de Montfort in Castelnaudary. Philip Augustus bought his services in 1212 and gave him command of a fleet which was destroyed in the Flemish port of Damme. Then Mauléon returned to John, whom he aided in his struggle with the barons in 1215. He was one of those whom John designated on his deathbed for a council of regency (1216). Then he went to Egypt (1219), and was present at the taking of Damietta. Returning to Poitou he was a second time seneschal for the king of England. He defended Saintonge against Louis VIII. in 1224, but was accused of having given La Rochelle up to the king of France, and the suspicions of the English again threw him back upon the French. Louis VIII. then turned over to him the defence of La Rochelle and the coast of Saintonge. In 1227 he took part in the rising of the barons of Poitiers and Anjou against the young Louis IX. He enjoyed a certain reputation for his poems in the langue d’oc.
See Chilhaud-Dumaine, “Savari de Mauléon,” in Positions des Thèses des élèves de l’École des Chartes (1877); Histoire littéraire de la France, xviii. 671-682.
MAULSTICK, or Mahlstick, a stick with a soft leather or padded head, used by painters to support the hand that holds the brush. The word is an adaptation of the Dutch maalstok, i.e. the painter’s stick, from malen, to paint.
MAUNDY THURSDAY (through O.Fr. mandé from Lat. mandatum, commandment, in allusion to Christ’s words: “A new commandment give I unto you,” after he had washed the disciples’ feet at the Last Supper), the Thursday before Easter. Maundy Thursday is sometimes known as Sheer or Chare Thursday, either in allusion, it is thought, to the “shearing” of heads and beards in preparation for Easter, or more probably in the word’s Middle English sense of “pure,” in allusion to the ablutions of the day. The chief ceremony, as kept from the early middle ages onwards—the washing of the feet of twelve or more poor men or beggars—was in the early Church almost unknown. Of Chrysostom and St Augustine, who both speak of Maundy Thursday 905 as being marked by a solemn celebration of the Sacrament, the former does not mention the foot-washing, and the latter merely alludes to it. Perhaps an indication of it may be discerned as early as the 4th century in a custom, current in Spain, northern Italy and elsewhere, of washing the feet of the catechumens towards the end of Lent before their baptism. It was not, however, universal, and in the 48th canon of the synod of Elvira (A.D. 306) it is expressly prohibited (cf. Corp. Jur. Can., c. 104, caus. i. qu. 1). From the 4th century ceremonial foot-washing became yearly more common, till it was regarded as a necessary rite, to be performed by the pope, all Catholic sovereigns, prelates, priests and nobles. In England the king washed the feet of as many poor men as he was years old, and then distributed to them meat, money and clothes. At Durham Cathedral, until the 16th century, every charity-boy had a monk to wash his feet. At Peterborough Abbey, in 1530, Wolsey made “his maund in Our Lady’s Chapel, having fifty-nine poor men whose feet he washed and kissed; and after he had wiped them he gave every of the said poor men twelve pence in money, three ells of good canvas to make them shirts, a pair of new shoes, a cast of red herrings and three white herrings.” Queen Elizabeth performed the ceremony, the paupers’ feet, however, being first washed by the yeomen of the laundry with warm water and sweet herbs. James II. was the last English monarch to perform the rite. William III. delegated the washing to his almoner, and this was usual until the middle of the 18th century. Since 1754 the foot-washing has been abandoned, and the ceremony now consists of the presentation of Maundy money, officially called Maundy Pennies. These were first coined in the reign of Charles II. They come straight from the Mint, and have their edges unmilled. The service which formerly took place in the Chapel Royal, Whitehall, is now held in Westminster Abbey. A procession is formed in the nave, consisting of the lord high almoner representing the sovereign, the clergy and the yeomen of the guard, the latter carrying white and red purses in baskets. The clothes formerly given are now commuted for in cash. The full ritual is gone through by the Roman Catholic archbishop of Westminster, and abroad it survives in all Catholic countries, a notable example being that of the Austrian emperor. In the Greek Church the rite survives notably at Moscow, St Petersburg and Constantinople. It is on Maundy Thursday that in the Church of Rome the sacred oil is blessed, and the chrism prepared according to an elaborate ritual which is given in the Pontificale.
MAUPASSANT, HENRI RENÉ ALBERT GUY DE (1850-1893), French novelist and poet, was born at the Château of Miromesnil in the department of Seine-Inférieure on the 5th August 1850. His grandfather, a landed proprietor of a good Lorraine family, owned an estate at Neuville-Champ-d’Oisel near Rouen, and bequeathed a moderate fortune to his son, a Paris stockbroker, who married Mademoiselle Laure Lepoitevin. Maupassant was educated at Yvetot and at the Rouen lycée. A copy of verses entitled Le Dieu créateur, written during his year of philosophy, has been preserved and printed. He entered the ministry of marine, and was promoted by M. Bardoux to the Cabinet de l’Instruction publique. A pleasant legend says that, in a report by his official chief, Maupassant is mentioned as not reaching the standard of the department in the matter of style. He may very well have been an unsatisfactory clerk, as he divided his time between rowing expeditions and attending the literary gatherings at the house of Gustave Flaubert, who was not, as he is often alleged to be, connected with Maupassant by any blood tie. Flaubert was not his uncle, nor his cousin, nor even his godfather, but merely an old friend of Madame de Maupassant, whom he had known from childhood. At the literary meetings Maupassant seldom shared in the conversation. Upon those who met him—Tourgenieff, Alphonse Daudet, Catulle Mendès, José-Maria de Heredia and Émile Zola—he left the impression of a simple young athlete. Even Flaubert, to whom Maupassant submitted some sketches, was not greatly struck by their talent, though he encouraged the youth to persevere. Maupassant’s first essay was a dramatic piece twice given at Étretat in 1873 before an audience which included Tourgenieff, Flaubert and Meilhac. In this indecorous performance, of which nothing more is heard, Maupassant played the part of a woman. During the next seven years he served a severe apprenticeship to Flaubert, who by this time realized his pupil’s exceptional gifts. In 1880 Maupassant published a volume of poems, Des Vers, against which the public prosecutor of Etampes took proceedings that were finally withdrawn through the influence of the senator Cordier. From Flaubert, who had himself been prosecuted for his first book, Madame Bovary, there came a letter congratulating the poet on the similarity between their first literary experiences. Des Vers is an extremely interesting experiment, which shows Maupassant to us still hesitating in his choice of a medium; but he recognized that it was not wholly satisfactory, and that its chief deficiency—the absence of verbal melody—was fatal. Later in the same year he contributed to the Soirées de Médan, a collection of short stories by MM. Zola, J.-K. Huysmans, Henry Céard, Léon Hennique and Paul Alexis; and in Boule de suif the young unknown author revealed himself to his amazed collaborators and to the public as an admirable writer of prose and a consummate master of the conte. There is perhaps no other instance in modern literary history of a writer beginning, as a fully equipped artist, with a genuine masterpiece. This early success was quickly followed by another. The volume entitled La Maison Tellier (1881) confirmed the first impression, and vanquished even those who were repelled by the author’s choice of subjects. In Mademoiselle Fifi (1883) he repeated his previous triumphs as a conteur, and in this same year he, for the first time, attempted to write on a larger scale. Choosing to portray the life of a blameless girl, unfortunate in her marriage, unfortunate in her son, consistently unfortunate in every circumstance of existence, he leaves her, ruined and prematurely old, clinging to the tragic hope, which time, as one feels, will belie, that she may find happiness in her grandson. This picture of an average woman undergoing the constant agony of disillusion Maupassant calls Une Vie (1883), and as in modern literature there is no finer example of cruel observation, so there is no sadder book than this, while the effect of extreme truthfulness which it conveys justifies its sub-title—L’Humble vérité. Certain passages of Une Vie are of such a character that the sale of the volume at railway bookstalls was forbidden throughout France. The matter was brought before the chamber of deputies, with the result of drawing still more attention to the book, and of advertising the Contes de la bécasse (1883), a collection of stories as improper as they are clever. Au soleil (1884), a book of travels which has the eminent qualities of lucid observation and exact description, was less read than Clair de lune, Miss Harriet, Les Sœurs Rondoli and Yvette, all published in 1883-1884 when Maupassant’s powers were at their highest level. Three further collections of short tales, entitled Contes et nouvelles, Monsieur Parent, and Contes du jour et de la nuit, issued in 1885, proved that while the author’s vision was as incomparable as ever, his fecundity had not improved his impeccable form. To 1885 also belongs an elaborate novel, Bel-ami, the cynical history of a particularly detestable, brutal scoundrel who makes his way in the world by means of his handsome face. Maupassant is here no less vivid in realizing his literary men, financiers and frivolous women than in dealing with his favourite peasants, boors and servants, to whom he returned in Toine (1886) and in La Petite roque (1886). About this time appeared the first symptoms of the malady which destroyed him; he wrote less, and though the novel Mont-Oriol (1887) shows him apparently in undiminished possession of his faculty, Le Horla (1887) suggests that he was already subject to alarming hallucinations. Restored to some extent by a sea-voyage, recorded in Sur l’eau (1888), he went back to short stories in Le Rosier de Madame Husson (1888), a burst of Rabelaisian humour equal to anything he had ever written. His novels Pierre et Jean (1888), Fort comme la mort (1889), and Notre cœur (1890) are penetrating studies touched with a profounder sympathy than had hitherto distinguished him; and this softening into pity for the tragedy of life is deepened in some of the tales included in Inutile beauté (1890). One of these, Le Champ d’Oliviers, is an unsurpassable example of 906 poignant, emotional narrative. With La Vie errante (1890), a volume of travels, Maupassant’s career practically closed. Musotte, a theatrical piece written in collaboration with M. Jacques Normand, was published in 1891. By this time inherited nervous maladies, aggravated by excessive physical exercises and by the imprudent use of drugs, had undermined his constitution. He began to take an interest in religious problems, and for a while made the Imitation his handbook; but his misanthropy deepened, and he suffered from curious delusions as to his wealth and rank. A victim of general paralysis, of which La Folie des grandeurs was one of the symptoms, he drank the waters at Aix-les-Bains during the summer of 1891, and retired to Cannes, where he purposed passing the winter. The singularities of conduct which had been observed at Aix-les-Bains grew more and more marked. Maupassant’s reason slowly gave way. On the 6th of January 1892 he attempted suicide, and was removed to Paris, where he died in the most painful circumstances on the 6th of July 1893. He is buried in the cemetery of Montparnasse. The opening chapters of two projected novels, L’Angélus and L’Ame étrangère, were found among his papers; these, with La Paix du ménage, a comedy in two acts, and two collections of tales, Le Père Milon (1898) and Le Colporteur (1899), have been published posthumously. A correspondence, called Amitié amoureuse (1897), and dedicated to his mother, is probably unauthentic. Among the prefaces which he wrote for the works of others, only one—an introduction to a French prose version of Mr Swinburne’s Poems and Ballads—is likely to interest English readers.
Maupassant began as a follower of Flaubert and of M. Zola, but, whatever the masters may have called themselves, they both remained essentially romantiques. The pupil is the last of the “naturalists”: he even destroyed naturalism, since he did all that can be done in that direction. He had no psychology, no theories of art, no moral or strong social prejudices, no disturbing imagination, no wealth of perplexing ideas. It is no paradox to say that his marked limitations made him the incomparable artist that he was. Undisturbed by any external influence, his marvellous vision enabled him to become a supreme observer, and, given his literary sense, the rest was simple. He prided himself in having no invention; he described nothing that he had not seen. The peasants whom he had known as a boy figure in a score of tales; what he saw in Government offices is set down in L’Héritage; from Algiers he gathers the material for Maroca; he drinks the waters and builds up Mont-Oriol; he enters journalism, constructs Bel-ami, and, for the sake of precision, makes his brother, Hervé de Maupassant, sit for the infamous hero’s portrait; he sees fashionable society, and, though it wearied him intensely, he transcribes its life in Fort comme la mort and Notre cœur. Fundamentally he finds all men alike. In every grade he finds the same ferocious, cunning, animal instincts at work: it is not a gay world, but he knows no other; he is possessed by the dread of growing old, of ceasing to enjoy; the horror of death haunts him like a spectre. It is an extremely simple outlook. Maupassant does not prefer good to bad, one man to another; he never pauses to argue about the meaning of life, a senseless thing which has the one advantage of yielding materials for art; his one aim is to discover the hidden aspect of visible things, to relate what he has observed, to give an objective rendering of it, and he has seen so intensely and so serenely that he is the most exact transcriber in literature. And as the substance is, so is the form: his style is exceedingly simple and exceedingly strong; he uses no rare or superfluous word, and is content to use the humblest word if only it conveys the exact picture of the thing seen. In ten years he produced some thirty volumes. With the exception of Pierre et Jean, his novels, excellent as they are, scarcely represent him at his best, and of over two hundred contes a proportion must be rejected. But enough will remain to vindicate his claim to a permanent place in literature as an unmatched observer and the most perfect master of the short story.
See also F. Brunetière, Le Roman naturaliste (1883); T. Lemaître, Les Contemporains (vols. i. v. vi.); R. Doumic, Ecrivains d’aujourd’hui (1894); an introduction by Henry James to The Odd Number ... (1891); a critical preface by the earl of Crewe to Pierre and Jean (1902); A. Symons, Studies in Prose and Verse (1904). There are many references to Maupassant in the Journal des Goncourt, and some correspondence with Marie Bashkirtseff was printed with Further Memoirs of that lady in 1901.
MAUPEOU, RENÉ NICOLAS CHARLES AUGUSTIN (1714-1792), chancellor of France, was born on the 25th of February 1714, being the eldest son of René Charles de Maupeou (1688-1775), who was president of the parlement of Paris from 1743 to 1757. He married in 1744 a rich heiress, Anne de Roncherolles, a cousin of Madame d’Épinay. Entering public life, he was his father’s right hand in the conflicts between the parlement and Christophe de Beaumont, archbishop of Paris, who was supported by the court. Between 1763 and 1768, dates which cover the revision of the case of Jean Calas and the trial of the comte de Lally, Maupeou was himself president of the parlement. In 1768, through the protection of Choiseul, whose fall two years later was in large measure his work, he became chancellor in succession to his father, who had held the office for a few days only. He determined to support the royal authority against the parlement, which in league with the provincial magistratures was seeking to arrogate to itself the functions of the states-general. He allied himself with the duc d’Aiguillon and Madame du Barry, and secured for a creature of his own, the Abbé Terrai, the office of comptroller-general. The struggle came over the trial of the case of the duc d’Aiguillon, ex-governor of Brittany, and of La Chalotais, procureur-général of the province, who had been imprisoned by the governor for accusations against his administration. When the parlement showed signs of hostility against Aiguillon, Maupeou read letters patent from Louis XV. annulling the proceedings. Louis replied to remonstrances from the parlement by a lit de justice, in which he demanded the surrender of the minutes of procedure. On the 27th of November 1770 appeared the Édit de règlement et de discipline, which was promulgated by the chancellor, forbidding the union of the various branches of the parlement and correspondence with the provincial magistratures. It also made a strike on the part of the parlement punishable by confiscation of goods, and forbade further obstruction to the registration of royal decrees after the royal reply had been given to a first remonstrance. This edict the magistrates refused to register, and it was registered in a lit de justice held at Versailles on the 7th of December, whereupon the parlement suspended its functions. After five summonses to return to their duties, the magistrates were surprised individually on the night of the 19th of January 1771 by musketeers, who required them to sign yes or no to a further request to return. Thirty-eight magistrates gave an affirmative answer, but on the exile of their former colleagues by lettres de cachet they retracted, and were also exiled. Maupeou installed the council of state to administer justice pending the establishment of six superior courts in the provinces, and of a new parlement in Paris. The cour des aides was next suppressed.
Voltaire praised this revolution, applauding the suppression of the old hereditary magistrature, but in general Maupeou’s policy was regarded as the triumph of tyranny. The remonstrances of the princes, of the nobles, and of the minor courts, were met by exile and suppression, but by the end of 1771 the new system was established, and the Bar, which had offered a passive resistance, recommenced to plead. But the death of Louis XV. in May 1774 ruined the chancellor. The restoration of the parlements was followed by a renewal of the quarrels between the new king and the magistrature. Maupeou and Terrai were replaced by Malesherbes and Turgot. Maupeou lived in retreat until his death at Thuit on the 29th of July 1792, having lived to see the overthrow of the ancien régime. His work, in so far as it was directed towards the separation of the judicial and political functions and to the reform of the abuses attaching to a hereditary magistrature, was subsequently endorsed by the Revolution; but no justification of his violent methods or defence of his intriguing and avaricious character is possible. He aimed at securing absolute power for Louis XV., but his action was in reality a serious blow to the monarchy.
The chief authority for the administration of Maupeou is the compte rendu in his own justification presented by him to Louis XVI. in 1789, which included a dossier of his speeches and edicts, and is preserved in the Bibliothèque nationale. These documents, in the hands of his former secretary, C. F. Lebrun, duc de Plaisance, formed the basis of the judicial system of France as established under the consulate (cf. C. F. Lebrun, Opinions, rapports et choix d’écrits politiques, published posthumously in 1829). See further Maupeouana (6 vols., Paris, 1775), which contains the pamphlets directed against him; Journal hist. de la révolution opérée ... par M. de Maupeou (7 vols., 1775); the official correspondence of Mercy-Argenteau, the letters of Mme d’Épinay; and Jules Flammermont, Le Chancelier Maupeou et les parlements (1883).
MAUPERTUIS, PIERRE LOUIS MOREAU DE (1698-1759), French mathematician and astronomer, was born at St Malo on the 17th of July 1698. When twenty years of age he entered the army, becoming lieutenant in a regiment of cavalry, and employing his leisure on mathematical studies. After five years he quitted the army and was admitted in 1723 a member of the Academy of Sciences. In 1728 he visited London, and was elected a fellow of the Royal Society. In 1736 he acted as chief of the expedition sent by Louis XV. into Lapland to measure the length of a degree of the meridian (see Earth, Figure of), and on his return home he became a member of almost all the scientific societies of Europe. In 1740 Maupertuis went to Berlin on the invitation of the king of Prussia, and took part in the battle of Mollwitz, where he was taken prisoner by the Austrians. On his release he returned to Berlin, and thence to Paris, where he was elected director of the Academy of Sciences in 1742, and in the following year was admitted into the Academy. Returning to Berlin in 1744, at the desire of Frederick II., he was chosen president of the Royal Academy of Sciences in 1746. Finding his health declining, he repaired in 1757 to the south of France, but went in 1758 to Basel, where he died on the 27th of July 1759. Maupertuis was unquestionably a man of considerable ability as a mathematician, but his restless, gloomy disposition involved him in constant quarrels, of which his controversies with König and Voltaire during the latter part of his life furnish examples.
The following are his most important works: Sur la figure de la terre (Paris, 1738); Discours sur la parallaxe de la lune (Paris, 1741); Discours sur la figure des astres (Paris, 1742); Éléments de la géographie (Paris, 1742); Lettre sur la comète de 1742 (Paris, 1742); Astronomie nautique (Paris, 1745 and 1746); Vénus physique (Paris, 1745); Essai de cosmologie (Amsterdam, 1750). His Œuvres were published in 1752 at Dresden and in 1756 at Lyons.
MAU RANIPUR, a town of British India in Jahnsi district, in the United Provinces. Pop. (1901), 17,231. It contains a large community of wealthy merchants and bankers. A special variety of red cotton cloth, known as kharua, is manufactured and exported to all parts of India. Trees line many of the streets, and handsome temples ornament the town.
MAUREL, ABDIAS (d. 1705), Camisard leader, became a cavalry officer in the French army and gained distinction in Italy; here he served under Marshal Catinat, and on this account he himself is sometimes known as Catinat. In 1702, when the revolt in the Cévennes broke out, he became one of the Camisard leaders, and in this capacity his name was soon known and feared. He refused to accept the peace made by Jean Cavalier in 1704, and after passing a few weeks in Switzerland he returned to France and became one of the chiefs of those Camisards who were still in arms. He was deeply concerned in a plot to capture some French towns, a scheme which, it was hoped, would be helped by England and Holland. But it failed; Maurel was betrayed, and with three other leaders of the movement was burned to death at Nîmes on the 22nd of April 1705. He was a man of great physical strength; but he was very cruel, and boasted he had killed 200 Roman Catholics with his own hands.
MAUREL, VICTOR (1848- ), French singer, was born at Marseilles, and educated in music at the Paris Conservatoire. He made his début in opera at Paris in 1868, and in London in 1873, and from that time onwards his admirable acting and vocal method established his reputation as one of the finest of operatic baritones. He created the leading part in Verdi’s Otello, and was equally fine in Wagnerian and Italian opera.
MAURENBRECHER, KARL PETER WILHELM (1838-1892), German historian, was born at Bonn on the 21st of December, 1838, and studied in Berlin and Munich under Ranke and Von Sybel, being especially influenced by the latter historian. After doing some research work at Simancas in Spain, he became professor of history at the university of Dorpat in 1867; and was then in turn professor at Königsberg, Bonn and Leipzig. He died at Leipzig on the 6th of November, 1892.
Many of Maurenbrecher’s works are concerned with the Reformation, among them being England im Reformationszeitalter (Düsseldorf, 1866); Karl V. und die deutschen Protestanten (Düsseldorf, 1865); Studien und Skizzen zur Geschichte der Reformationszeit (Leipzig, 1874); and the incomplete Geschichte der Katholischen Reformation (Nördlingen, 1880). He also wrote Don Karlos (Berlin, 1876); Gründung des deutschen Reiches 1859-1871 (Leipzig, 1892, and again 1902); and Geschichte der deutschen Königswahlen (Leipzig, 1889). See G. Wolf, Wilhelm Maurenbrecher (Berlin, 1893).
MAUREPAS, JEAN FRÉDÉRIC PHÉLYPEAUX, Comte de (1701-1781), French statesman, was born on the 9th of July 1701 at Versailles, being the son of Jérôme de Pontchartrain, secretary of state for the marine and the royal household. Maurepas succeeded to his father’s charge at fourteen, and began his functions in the royal household at seventeen, while in 1725 he undertook the actual administration of the navy. Although essentially light and frivolous in character, Maurepas was seriously interested in scientific matters, and he used the best brains of France to apply science to questions of navigation and of naval construction. He was disgraced in 1749, and exiled from Paris for an epigram against Madame de Pompadour. On the accession of Louis XVI., twenty-five years later, he became a minister of state and Louis XVI.’s chief adviser. He gave Turgot the direction of finance, placed Lamoignon-Malesherbes over the royal household and made Vergennes minister for foreign affairs. At the outset of his new career he showed his weakness by recalling to their functions, in deference to popular clamour, the members of the old parlement ousted by Maupeou, thus reconstituting the most dangerous enemy of the royal power. This step, and his intervention on behalf of the American states, helped to pave the way for the French revolution. Jealous of his personal ascendancy over Louis XVI., he intrigued against Turgot, whose disgrace in 1776 was followed after six months of disorder by the appointment of Necker. In 1781 Maurepas deserted Necker as he had done Turgot, and he died at Versailles on the 21st of November 1781.
Maurepas is credited with contributions to the collection of facetiae known as the Étrennes de la Saint Jean (2nd ed., 1742). Four volumes of Mémoires de Maurepas, purporting to be collected by his secretary and edited by J. L. G. Soulavie in 1792, must be regarded as apocryphal. Some of his letters were published in 1896 by the Soc. de l’hist. de Paris. His éloge in the Academy of Sciences was pronounced by Condorcet.
MAURER, GEORG LUDWIG VON (1790-1872), German statesman and historian, son of a Protestant pastor, was born at Erpolzheim, near Dürkheim, in the Rhenish Palatinate, on the 2nd of November 1790. Educated at Heidelberg, he went in 1812 to reside in Paris, where he entered upon a systematic study of the ancient legal institutions of the Germans. Returning to Germany in 1814, he received an appointment under the Bavarian government, and afterwards filled several important official positions. In 1824 he published at Heidelberg his Geschichte des altgermanischen und namentlich altbayrischen öffentlich-mündlichen Gerichtsverfahrens, which obtained the first prize of the academy of Munich, and in 1826 he became professor in the university of Munich. In 1829 he returned to official life, and was soon offered an important post. In 1832, when Otto (Otho), son of Louis I., king of Bavaria, was chosen to fill the throne of Greece, a council of regency was nominated during his minority, and Maurer was appointed a member. He applied himself energetically to the task of creating institutions adapted to the requirements of a modern civilized community; but grave difficulties soon arose and Maurer was recalled in 1834, when he returned to Munich. This loss was a serious one for Greece. Maurer was the ablest, most energetic and most liberal-minded member of the council, and it was through his enlightened 908 efforts that Greece obtained a revised penal code, regular tribunals and an improved system of civil procedure. Soon after his recall he published Das griechische Volk in öffentlicher, kirchlicher, und privatrechtlicher Beziehung vor und nach dem Freiheitskampfe bis zum 31 Juli 1834 (Heidelberg, 1835-1836), a useful source of information for the history of Greece before Otto ascended the throne, and also for the labours of the council of regency to the time of the author’s recall. After the fall of the ministry of Karl von Abel (1788-1859) in 1847, he became chief Bavarian minister and head of the departments of foreign affairs and of justice, but was overthrown in the same year. He died at Munich on the 9th of May 1872. His only son, Conrad von Maurer (1823-1902), was a Scandinavian scholar of some repute, and like his father was a professor at the university of Munich.
Maurer’s most important contribution to history is a series of books on the early institutions of the Germans. These are: Einleitung zur Geschichte der Mark-, Hof-, Dorf-, und Stadtverfassung und der öffentlichen Gewalt (Munich, 1854); Geschichte der Markenverfassung in Deutschland (Erlangen, 1856); Geschichte der Fronhöfe, der Bauernhöfe, und der Hofverfassung in Deutschland (Erlangen, 1862-1863); Geschichte der Dorfverfassung in Deutschland (Erlangen, 1865-1866); and Geschichte der Slädteverfassung in Deutschland (Erlangen, 1869-1871). These works are still important authorities for the early history of the Germans. Among other works are, Das Stadt- und Landrechtsbuch Ruprechts von Freising, ein Beitrag zur Geschichte des Schwabenspiegels (Stuttgart, 1839); Über die Freipflege (plegium liberale), und die Entstehung der grossen und kleinen Jury in England (Munich, 1848); and Über die deutsche Reichsterritorial- und Rechtsgeschichte (1830).
Sec K. T. von Heigel, Denkwürdigkeiten des bayrischen Staatsrats G. L. von Maurer (Munich, 1903).
MAURETANIA, the ancient name of the north-western angle of the African continent, and under the Roman Empire also of a large territory eastward of that angle. The name had different significations at different times; but before the Roman occupation, Mauretania comprised a considerable part of the modern Morocco i.e. the northern portion bounded on the east by Algiers. Towards the south we may suppose it bounded by the Atlas range, and it seems to have been regarded by geographers as extending along the coast to the Atlantic as far as the point where that chain descends to the sea, in about 30 N. lat. (Strabo, p. 825). The magnificent plateau in which the city of Morocco is situated seems to have been unknown to ancient geographers, and was certainly never included in the Roman Empire. On the other hand, the Gaetulians to the south of the Atlas range, on the date-producing slopes towards the Sahara, seem to have owned a precarious subjection to the kings of Mauretania, as afterwards to the Roman government. A large part of the country is of great natural fertility, and in ancient times produced large quantities of corn, while the slopes of Atlas were clothed with forests, which, besides other kinds of timber, produced the celebrated ornamental wood called citrum (Plin. Hist. Nat. 13-96), for tables of which the Romans gave fabulous prices. (For physical geography, see Morocco.)
Mauretania, or Maurusia as it was called by Greek writers, signified the land of the Mauri, a term still retained in the modern name of Moors (q.v.). The origin and ethnical affinities of the race are uncertain; but it is probable that all the inhabitants of this northern tract of Africa were kindred races belonging to the great Berber family, possibly with an intermingled fair-skinned race from Europe (see Tissot, Géographie comparée de la province romaine d’Afrique, i. 400 seq.; also Berbers). They first appear in history at the time of the Jugurthine War (110-106 B.C.), when Mauretania was under the government of Bocchus and seems to have been recognized as organized state (Sallust, Jugurtha, 19). To this Bocchus was given, after the war, the western part of Jugurtha’s kingdom of Numidia, perhaps as far east as Saldae (Bougie). Sixty years later, at the time of the dictator Caesar, we find two Mauretanian kingdoms, one to the west of the river Mulucha under Bogud, and the other to the east under a Bocchus; as to the date or cause of the division we are ignorant. Both these kings took Caesar’s part in the civil wars, and had their territory enlarged by him (Appian, B.C. 4, 54). In 25 B.C., after their deaths, Augustus gave the two kingdoms to Juba II. of Numidia (see under Juba), with the river Ampsaga as the eastern frontier (Plin. 5. 22; Ptol. 4. 3. 1). Juba and his son Ptolemaeus after him reigned till A.D. 40, when the latter was put to death by Caligula, and shortly afterwards Claudius incorporated the kingdom into the Roman state as two provinces, viz. Mauretania Tingitana to the west of the Mulucha and M. Caesariensis to the east of that river, the latter taking its name from the city Caesarea (formerly Iol), which Juba had thus named and adopted as his capital. Thus the dividing line between the two provinces was the same as that which had originally separated Mauretania from Numidia (q.v.). These provinces were governed until the time of Diocletian by imperial procurators, and were occasionally united for military purposes. Under and after Diocletian M. Tingitana was attached administratively to the dioicesis of Spain, with which it was in all respects closely connected; while M. Caesariensis was divided by making its eastern part into a separate government, which was called M. Sitifensis from the Roman colony Sitifis.
In the two provinces of Mauretania there were at the time of Pliny a number of towns, including seven (possibly eight) Roman colonies in M. Tingitana and eleven in M. Caesariensis; others were added later. These were mostly military foundations, and served the purpose of securing civilization against the inroads of the natives, who were not in a condition to be used as material for town-life as in Gaul and Spain, but were under the immediate government of the procurators, retaining their own clan organization. Of these colonies the most important, beginning from the west, were Lixus on the Atlantic, Tingis (Tangier), Rusaddir (Melila, Melilla), Cartenna (Tenes), Iol or Caesarea (Cherchel), Icosium (Algiers), Saldae (Bougie), Igilgili (Jijelli) and Sitifis (Setif). All these were on the coast but the last, which was some distance inland. Besides these there were many municipia or oppida civium romanorum (Plin. 5. 19 seq.), but, as has been made clear by French archaeologists who have explored these regions, Roman settlements are less frequent the farther we go west, and M. Tingitana has as yet yielded but scanty evidence of Roman civilization. On the whole Mauretania was in a flourishing condition down to the irruption of the Vandals in A.D. 429; in the Notitia nearly a hundred and seventy episcopal sees are enumerated here, but we must remember that numbers of these were mere villages.
In 1904 the term Mauretania was revived as an official designation by the French government, and applied to the territory north of the lower Senegal under French protection (see Senegal).
To the authorities quoted under Africa, Roman, may be added here Göbel, Die West-küste Afrikas im Alterthum.
MAURIAC, a town of central France, capital of an arrondissement in the department of Cantal, 39 m. N.N.W. of Aurillac by rail. Pop. (1906), 2558. Mauriac, built on the slope of a volcanic hill, has a church of the 12th century, and the buildings of an old abbey now used as public offices and dwellings; the town owes its origin to the abbey, founded during the 6th century. It is the seat of a sub-prefect and has a tribunal of first instance and a communal college. There are marble quarries in the vicinity.
MAURICE [or Mauritius], ST (d. c. 286), an early Christian martyr, who, with his companions, is commemorated by the Roman Catholic Church on the 22nd of September. The oldest form of his story is found in the Passio ascribed to Eucherius, bishop of Lyons, c. 450, who relates how the “Theban” legion commanded by Mauritius was sent to north Italy to reinforce the army of Maximinian. Maximinian wished to use them in persecuting the Christians, but as they themselves were of this faith, they refused, and for this, after having been twice decimated, the legion was exterminated at Octodurum (Martigny) near Geneva. In late versions this legend was expanded and varied, the martyrdom was connected with a refusal to take part in a great sacrifice ordered at Octodurum and the name of Exsuperius was added to that of Mauritius. Gregory of Tours (c. 539-593) speaks of a company of the same legion which suffered at Cologne.
The Magdeburg Centuries, in spite of Mauritius being the patron saint of Magdeburg, declared the whole legend fictitious; J. A. du Bordien La Légion thébéenne (Amsterdam, 1705); J. J. Hottinger in Helvetische Kirchengeschichte (Zürich, 1708); and F. W. Rettberg, Kirchengeschichte Deutschlands (Göttingen, 1845-1848) have also demonstrated its untrustworthiness, while the Bollandists, De Rivaz and Joh. Friedrich uphold it. Apart from the a priori improbability of a whole legion being martyred, the difficulties are that in 286 Christians everywhere throughout the empire were not molested, that at no later date have we evidence of the presence of Maximinian in the Valais, and that none of the writers nearest to the event (Eusebius, Lactantius, Orosius, Sulpicius Severus) know anything of it. It is of course quite possible that isolated cases of officers being put to death for their faith occurred during Maximinian’s reign, and on some such cases the legend may have grown up during the century and a half between Maximinian and Eucherius. The cult of St Maurice and the Theban legion is found in Switzerland (where two places bear the name in Valais, 909 besides St Moritz in Grisons), along the Rhine, and in north Italy. The foundation of the abbey of St Maurice (Agaunum) in the Valais is usually ascribed to Sigismund of Burgundy (515). Relics of the saint are preserved here and at Brieg and Turin.
MAURICE (Mauricius Flavius Tiberius) (c. 539-602), East Roman emperor from 582 to 602, was of Roman descent, but a native of Arabissus in Cappadocia. He spent his youth at the court of Justin II., and, having joined the army, fought with distinction in the Persian War (578-581). At the age of forty-three he was declared Caesar by the dying emperor Tiberius II., who bestowed upon him the hand of his daughter Constantina. Maurice brought the Persian War to a successful close by the restoration of Chosroes II. to the throne (591). On the northern frontier he at first bought off the Avars by payments which compelled him to exercise strict economy in his general administration, but after 595 inflicted several defeats upon them through his general Crispus. By his strict discipline and his refusal to ransom a captive corps he provoked to mutiny the army on the Danube. The revolt spread to the popular factions in Constantinople, and Maurice consented to abdicate. He withdrew to Chalcedon, but was hunted down and put to death after witnessing the slaughter of his five sons.
The work on military art (στρατηγικά) ascribed to him is a contemporary work of unknown authorship (ed. Scheffer, Arriani tactica et Mauricii ars militaris, Upsala, 1664; see Max Jähns, Gesch. d. Kriegswissensch., i. 152-156).
See Theophylactus Simocatta, Vita Mauricii (ed. de Boor, 1887); E. Gibbon, The Decline and Fall of the Roman Empire (ed. Bury, London, 1896, v. 19-21, 57); J. B. Bury, The Later Roman Empire (London, 1889, ii. 83-94); G. Finlay, History of Greece (ed. 1877, Oxford, i. 299-306).
MAURICE (1521-1553), elector of Saxony, elder son of Henry, duke of Saxony, belonging to the Albertine branch of the Wettin family, was born at Freiberg on the 21st of March 1521. In January 1541 he married Agnes, daughter of Philip, landgrave of Hesse. In that year he became duke of Saxony by his father’s death, and he continued Henry’s work in forwarding the progress of the Reformation. Duke Henry had decreed that his lands should be divided between his two sons, but as a partition was regarded as undesirable the whole of the duchy came to his elder son. Maurice, however, made generous provision for his brother Augustus, and the desire to compensate him still further was one of the minor threads of his subsequent policy. In 1542 he assisted the emperor Charles V. against the Turks, in 1543 against William, duke of Cleves, and in 1544 against the French; but his ambition soon took a wider range. The harmonious relations which subsisted between the two branches of the Wettins were disturbed by the interference of Maurice in Cleves, a proceeding distasteful to the Saxon elector, John Frederick; and a dispute over the bishopric of Meissen having widened the breach, war was only averted by the mediation of Philip of Hesse and Luther. About this time Maurice seized the idea of securing for himself the electoral dignity held by John Frederick, and his opportunity came when Charles was preparing to attack the league of Schmalkalden. Although educated as a Lutheran, religious questions had never seriously appealed to Maurice. As a youth he had joined the league of Schmalkalden, but this adhesion, as well as his subsequent declaration to stand by the confession of Augsburg, cannot be regarded as the decision of his maturer years. In June 1546 he took a decided step by making a secret agreement with Charles at Regensburg. Maurice was promised some rights over the archbishopric of Magdeburg and the bishopric of Halberstadt; immunity, in part at least, for his subjects from the Tridentine decrees; and the question of transferring the electoral dignity was discussed. In return the duke probably agreed to aid Charles in his proposed attack on the league as soon as he could gain the consent of the Saxon estates, or at all events to remain neutral during the impending war. The struggle began in July 1546, and in October Maurice declared war against John Frederick. He secured the formal consent of Charles to the transfer of the electoral dignity and took the field in November. He had gained a few successes when John Frederick hastened from south Germany to defend his dominions. Maurice’s ally, Albert Alcibiades, prince of Bayreuth, was taken prisoner at Rochlitz; and the duke, driven from electoral Saxony, was unable to prevent his own lands from being overrun. Salvation, however, was at hand. Marching against John Frederick, Charles V., aided by Maurice, gained a decisive victory at Mühlberg in April 1547, after which by the capitulation of Wittenberg John Frederick renounced the electoral dignity in favour of Maurice, who also obtained a large part of his kinsman’s lands. The formal investiture of the new elector took place at Augsburg in February 1548.
The plans of Maurice soon took a form less agreeable to the emperor. The continued imprisonment of his father-in-law, Philip of Hesse, whom he had induced to surrender to Charles and whose freedom he had guaranteed, was neither his greatest nor his only cause of complaint. The emperor had refused to complete the humiliation of the family of John Frederick; he had embarked upon a course of action which boded danger to the elector’s Lutheran subjects, and his increased power was a menace to the position of Maurice. Assuring Charles of his continued loyalty, the elector entered into negotiations with the discontented Protestant princes. An event happened which gave him a base of operations, and enabled him to mask his schemes against the emperor. In 1550 he had been entrusted with the execution of the imperial ban against the city of Magdeburg, and under cover of these operations he was able to collect troops and to concert measures with his allies. Favourable terms were granted to Magdeburg, which surrendered and remained in the power of Maurice, and in January 1552 a treaty was concluded with Henry II. of France at Chambord. Meanwhile Maurice had refused to recognize the Interim issued from Augsburg in May 1548 as binding on Saxony; but a compromise was arranged on the basis of which the Leipzig Interim was drawn up for his lands. It is uncertain how far Charles was ignorant of the elector’s preparations, but certainly he was unprepared for the attack made by Maurice and his allies in March 1552. Augsburg was taken, the pass of Ehrenberg was forced, and in a few days the emperor left Innsbruck as a fugitive. Ferdinand undertook to make peace, and the Treaty of Passau, signed in August 1552, was the result. Maurice obtained a general amnesty and freedom for Philip of Hesse, but was unable to obtain a perpetual religious peace for the Lutherans. Charles stubbornly insisted that this question must be referred to the Diet, and Maurice was obliged to give way. He then fought against the Turks, and renewed his communications with Henry of France. Returning from Hungary the elector placed himself at the head of the princes who were seeking to check the career of his former ally, Albert Alcibiades, whose depredations were making him a curse to Germany. The rival armies met at Sievershausen on the 9th of July 1553, where after a fierce encounter Albert was defeated. The victor, however, was wounded during the fight and died two days later.
Maurice was a friend to learning, and devoted some of the secularized church property to the advancement of education. Very different estimates have been formed of his character. He has been represented as the saviour of German Protestantism on the one hand, and on the other as a traitor to his faith and country. In all probability he was neither the one nor the other, but a man of great ambition who, indifferent to religious considerations, made good use of the exigencies of the time. He was generous and enlightened, a good soldier and a clever diplomatist. He left an only daughter Anna (d. 1577), who became the second wife of William the Silent, prince of Orange.
The elector’s Politische Korrespondenz has been edited by E. Brandenburg (Leipzig, 1900-1904); and a sketch of him is given by Roger Ascham in A Report and Discourse of the Affairs and State of Germany (London, 1864-1865). See also F. A. von Langenn, Moritz Herzog und Churfürst zu Sachsen (Leipzig, 1841); G. Voigt, Moritz von Sachsen (Leipzig, 1876); E. Brandenburg, Moritz von Sachsen (Leipzig, 1898); S. Issleib, Moritz von Sachsen als protestantischer Fürst (Hamburg, 1898); J. Witter, Die Beziehung und der Verkehr des Kurfürsten Moritz mit König Ferdinand (Jena, 1886); L. von Ranke, Deutsche Geschichte im Zeitalter der Reformation, Bde. IV. and V. (Leipzig, 1882); and W. Maurenbrecher in the Allgemeine deutsche Biographie, Bd. XXII. (Leipzig, 1885). For 910 bibliography see Maurenbrecher; and The Cambridge Modern History, vol. ii. (Cambridge, 1903).
MAURICE, JOHN FREDERICK DENISON (1805-1872), English theologian, was born at Normanston, Suffolk, on the 29th of August, 1805. He was the son of a Unitarian minister, and entered Trinity College, Cambridge, in 1823, though it was then impossible for any but members of the Established Church to obtain a degree. Together with John Sterling (with whom he founded the Apostles’ Club) he migrated to Trinity Hall, whence he obtained a first class in civil law in 1827; he then came to London, and gave himself to literary work, writing a novel, Eustace Conyers, and editing the London Literary Chronicle until 1830, and also for a short time the Athenaeum. At this time he was much perplexed as to his religious opinions, and he ultimately found relief in a decision to take a further university course and to seek Anglican orders. Entering Exeter College, Oxford, he took a second class in classics in 1831. He was ordained in 1834, and after a short curacy at Bubbenhall in Warwickshire was appointed chaplain of Guy’s Hospital, and became thenceforward a sensible factor in the intellectual and social life of London. From 1839 to 1841 Maurice was editor of the Education Magazine. In 1840 he was appointed professor of English history and literature in King’s College, and to this post in 1846 was added the chair of divinity. In 1845 he was Boyle lecturer and Warburton lecturer. These chairs he held till 1853. In that year he published Theological Essays, wherein were stated opinions which savoured to the principal, Dr R. W. Jelf, and to the council, of unsound theology in regard to eternal punishment. He had previously been called on to clear himself from charges of heterodoxy brought against him in the Quarterly Review (1851), and had been acquitted by a committee of inquiry. Now again he maintained with great warmth of conviction that his views were in close accordance with Scripture and the Anglican standards, but the council, without specifying any distinct “heresy” and declining to submit the case to the judgment of competent theologians, ruled otherwise, and he was deprived of his professorships. He held at the same time the chaplaincy of Lincoln’s Inn, for which he had resigned Guy’s (1846-1860), but when he offered to resign this the benchers refused. Nor was he assailed in the incumbency of St. Peter’s, Vere Street, which he held for nine years (1860-1869), and where he drew round him a circle of thoughtful people. During the early years of this period he was engaged in a hot and bitter controversy with H. L. Mansel (afterwards dean of St Paul’s), arising out of the latter’s Bampton lecture upon reason and revelation.
During his residence in London Maurice was specially identified with two important movements for education. He helped to found Queen’s College for the education of women (1848), and the Working Men’s College (1854), of which he was the first principal. He strongly advocated the abolition of university tests (1853), and threw himself with great energy into all that affected the social life of the people. Certain abortive attempts at co-operation among working men, and the movement known as Christian Socialism, were the immediate outcome of his teaching. In 1866 Maurice was appointed professor of moral philosophy at Cambridge, and from 1870 to 1872 was incumbent of St Edward’s in that city. He died on the 1st of April 1872.
He was twice married, first to Anna Barton, a sister of John Sterling’s wife, secondly to a half-sister of his friend Archdeacon Hare. His son Major-General Sir J. Frederick Maurice (b. 1841), became a distinguished soldier and one of the most prominent military writers of his time.
Those who knew Maurice best were deeply impressed with the spirituality of his character. “Whenever he woke in the night,” says his wife, “he was always praying.” Charles Kingsley called him “the most beautiful human soul whom God has ever allowed me to meet with.” As regards his intellectual attainments we may set Julius Hare’s verdict “the greatest mind since Plato” over against Ruskin’s “by nature puzzle-headed and indeed wrong-headed.” Such contradictory impressions bespeak a life made up of contradictory elements. Maurice was a man of peace, yet his life was spent in a series of conflicts; of deep humility, yet so polemical that he often seemed biased; of large charity, yet bitter in his attack upon the religious press of his time; a loyal churchman who detested the label “Broad,” yet poured out criticism upon the leaders of the Church. With an intense capacity for visualizing the unseen, and a kindly dignity, he combined a large sense of humour. While most of the “Broad Churchmen” were influenced by ethical and emotional considerations in their repudiation of the dogma of everlasting torment, he was swayed by purely intellectual and theological arguments, and in questions of a more general liberty he often opposed the proposed Liberal theologians, though he as often took their side if he saw them hard pressed. He had a wide metaphysical and philosophical knowledge which he applied to the history of theology. He was a strenuous advocate of ecclesiastical control in elementary education, and an opponent of the new school of higher biblical criticism, though so far an evolutionist as to believe in growth and development as applied to the history of nations.
As a preacher, his message was apparently simple; his two great convictions were the fatherhood of God, and that all religious systems which had any stability lasted because of a portion of truth which had to be disentangled from the error differentiating them from the doctrines of the Church of England as understood by himself. His love to God as his Father was a passionate adoration which filled his whole heart. The prophetic, even apocalyptic, note of his preaching was particularly impressive. He prophesied in London as Isaiah prophesied to the little towns of Palestine and Syria, “often with dark foreboding, but seeing through all unrest and convulsion the working out of a sure divine purpose.” Both at King’s College and at Cambridge Maurice gathered round him a band of earnest students, to whom he directly taught much that was valuable drawn from wide stores of his own reading, wide rather than deep, for he never was, strictly speaking, a learned man. Still more did he encourage the habit of inquiry and research, more valuable than his direct teaching. In his Socratic power of convincing his pupils of their ignorance he did more than perhaps any other man of his time to awaken in those who came under his sway the desire for knowledge and the process of independent thought.
As a social reformer, Maurice was before his time, and gave his eager support to schemes for which the world was not ready. From an early period of his life in London the condition of the poor pressed upon him with consuming force; the enormous magnitude of the social questions involved was a burden which he could hardly bear. For many years he was the clergyman whom working men of all opinions seemed to trust even if their faith in other religious men and all religious systems had faded, and he had a marvellous power of attracting the zealot and the outcast.
His works cover nearly 40 volumes, often obscure, often tautological, and with no great distinction of style. But their high purpose and philosophical outlook give his writings a permanent place in the history of the thought of his time. The following are the more important works—some of them were rewritten and in a measure recast, and the date given is not necessarily that of the first appearance of the book, but of its more complete and abiding form: Eustace Conway, or the Brother and Sister, a novel (1834); The Kingdom of Christ (1842); Christmas Day and Other Sermons (1843); The Unity of the New Testament (1844); The Epistle to the Hebrews (1846); The Religions of the World (1847); Moral and Metaphysical Philosophy (at first an article in the Encyclopaedia Metropolitana, 1848); The Church a Family (1850); The Old Testament (1851); Theological Essays (1853); The Prophets and Kings of the Old Testament (1853); Lectures on Ecclesiastical History (1854); The Doctrine of Sacrifice (1854); The Patriarchs and Lawgivers of the Old Testament (1855); The Epistles of St John (1857); The Commandments as Instruments of National Reformation (1866); On the Gospel of St Luke (1868); The Conscience: Lectures on Casuistry (1868); The Lord’s Prayer, a Manual (1870). The greater part of these works were first delivered as sermons or lectures. Maurice also contributed many prefaces and introductions to the works of friends, as to Archdeacon Hare’s Charges, Kingsley’s Saint’s Tragedy, &c.
See Life by his son (2 vols., London, 1884), and a monograph by C. F. G. Masterman (1907) in “Leader of the Church” series; W. E. Collins in Typical English Churchmen, pp. 327-360 (1902), and T. Hughes in The Friendship of Books (1873).
MAURICE OF NASSAU, prince of Orange (1567-1625), the second son of William the Silent, by Anna, only daughter of the famous Maurice, elector of Saxony, was born at Dillenburg. At the time of his father’s assassination in 1584 he was being educated at the university of Leiden, at the expense of the states of Holland and Zeeland. Despite his youth he was made stadtholder of those two provinces and president of the council of 911 state. During the period of Leicester’s governorship he remained in the background, engaged in acquiring a thorough knowledge of the military art, and in 1586 the States of Holland conferred upon him the title of prince. On the withdrawal of Leicester from the Netherlands in August 1587, Johan van Oldenbarneveldt, the advocate of Holland, became the leading statesman of the country, a position which he retained for upwards of thirty years. He had been a devoted adherent of William the Silent and he now used his influence to forward the interests of Maurice. In 1588 he was appointed by the States-General captain and admiral-general of the Union, in 1590 he was elected stadtholder of Utrecht and Overysel, and in 1591 of Gelderland. From this time forward, Oldenbarneveldt at the head of the civil government and Maurice in command of the armed forces of the republic worked together in the task of rescuing the United Netherlands from Spanish domination (for details see Holland). Maurice soon showed himself to be a general second in skill to none of his contemporaries. He was especially famed for his consummate knowledge of the science of sieges. The twelve years’ truce on the 9th of April 1609 brought to an end the cordial relations between Maurice and Oldenbarneveldt. Maurice was opposed to the truce, but the advocate’s policy triumphed and henceforward there was enmity between them. The theological disputes between the Remonstrants and contra-Remonstrants found them on different sides; and the theological quarrel soon became a political one. Oldenbarneveldt, supported by the states of Holland, came forward as the champion of provincial sovereignty against that of the states-general; Maurice threw the weight of his sword on the side of the union. The struggle was a short one, for the army obeyed the general who had so often led them to victory. Oldenbarneveldt perished on the scaffold, and the share which Maurice had in securing the illegal condemnation by a packed court of judges of the aged patriot must ever remain a stain upon his memory.
Maurice, who had on the death of his elder brother Philip William, in February 1618, become prince of Orange, was now supreme in the state, but during the remainder of his life he sorely missed the wise counsels of the experienced Oldenbarneveldt. War broke out again in 1621, but success had ceased to accompany him on his campaigns. His health gave way, and he died, a prematurely aged man, at the Hague on the 4th of April 1625. He was buried by his father’s side at Delft.
Bibliography.—I. Commelin, Wilhelm en Maurits v. Nassau, pr. v. Orangien, haer leven en bedrijf (Amsterdam, 1651); G. Groen van Prinsterer, Archives ou correspondance de la maison d’Orange-Nassau, 1e série, 9 vols. (Leiden, 1841-1861); G. Groen van Prinsterer, Maurice et Barneveldt (Utrecht, 1875); J. L. Motley, Life and Death of John of Barneveldt (2 vols., The Hague, 1894); C. M. Kemp, v.d. Maurits v. Nassau, prins v. Oranje in zijn leven en verdiensten (4 vols., Rotterdam, 1845); M. O. Nutting, The Days of Prince Maurice (Boston and Chicago, 1894).
MAURISTS, a congregation of French Benedictines called after St Maurus (d. 565), a disciple of St Benedict and the legendary introducer of the Benedictine rule and life into Gaul.1 At the end of the 16th century the Benedictine monasteries of France had fallen into a state of disorganization and relaxation. In the abbey of St Vaune near Verdun a reform was initiated by Dom Didier de la Cour, which spread to other houses in Lorraine, and in 1604 the reformed congregation of St Vaune was established, the most distinguished members of which were Ceillier and Calmet. A number of French houses joined the new congregation; but as Lorraine was still independent of the French crown, it was considered desirable to form on the same lines a separate congregation for France. Thus in 1621 was established the famous French congregation of St Maur. Most of the Benedictine monasteries of France, except those belonging to Cluny, gradually joined the new congregation, which eventually embraced nearly two hundred houses. The chief house was Saint-Germain-des-Prés, Paris, the residence of the superior-general and centre of the literary activity of the congregation. The primary idea of the movement was not the undertaking of literary and historical work, but the return to a strict monastic régime and the faithful carrying out of Benedictine life; and throughout the most glorious period of Maurist history the literary work was not allowed to interfere with the due performance of the choral office and the other duties of the monastic life. Towards the end of the 18th century a tendency crept in, in some quarters, to relax the monastic observances in favour of study; but the constitutions of 1770 show that a strict monastic régime was maintained until the end. The course of Maurist history and work was checkered by the ecclesiastical controversies that distracted the French Church during the 17th and 18th centuries. Some of the members identified themselves with the Jansenist cause; but the bulk, including nearly all the greatest names, pursued a middle path, opposing the lax moral theology condemned in 1679 by Pope Innocent XI., and adhering to those strong views on grace and predestination associated with the Augustinian and Thomist schools of Catholic theology; and like all the theological faculties and schools on French soil, they were bound to teach the four Gallican articles. It seems that towards the end of the 18th century a rationalistic and free-thinking spirit invaded some of the houses. The congregation was suppressed and the monks scattered at the revolution, the last superior-general with forty of his monks dying on the scaffold in Paris. The present French congregation of Benedictines initiated by Dom Guéranger in 1833 is a new creation and has no continuity with the congregation of St Maur.
The great claim of the Maurists to the gratitude and admiration of posterity is their historical and critical school, which stands quite alone in history, and produced an extraordinary number of colossal works of erudition which still are of permanent value. The foundations of this school were laid by Dom Tarisse, the first superior-general, who in 1632 issued instructions to the superiors of the monasteries to train the young monks in the habits of research and of organized work. The pioneers in production were Ménard and d’Achery.
The following tables give, divided into groups, the most important Maurist works, along with such information as may be useful to students. All works are folio when not otherwise noted:—
| I.—The Editions of the Fathers | |||
Epistle of Barnabas (editio princeps) | Ménard | 1645 | 1 in 4to |
Lanfranc | d’Achery | 1648 | 1 |
Guibert of Nogent | d’Achery | 1651 | 1 |
Robert Pulleyn and Peter of Poitiers | Mathou | 1655 | 1 |
Bernard | Mabillon | 1667 | 2 |
Anselm | Gerberon | 1675 | 1 |
Cassiodorus | Garet | 1679 | 1 |
Augustine (see Kukula, Die Mauriner-Ausgabe des Augustinus, 1898) | Delfau, Blampin, Coustant, Guesnie | 1681-1700 | 11 |
Ambrose | du Frische | 1686-1690 | 2 |
Acta martyrum sincera | Ruinart | 1689 | 1 |
Hilary | Coustant | 1693 | 1 |
Jerome | Martianay | 1693-1706 | 5 |
Athanasius | Loppin and Montfaucon | 1698 | 3 |
Gregory of Tours | Ruinart | 1699 | 1 |
Gregory the Great | Sainte-Marthe | 1705 | 4 |
Hildebert of Tours | Beaugendre | 1708 | 1 |
Irenaeus | Massuet | 1710 | 1 |
Chrysostom | Montfaucon | 1718-1738 | 13 |
Cyril of Jerusalem | Touttée and Maran | 1720 | 1 |
Epistolae romanorum pontificum2 | Coustant | 1721 | 1 |
Basil | Garnier and Maran | 1721-1730 | 3 |
Cyprian | (Baluze, not a Maurist) finished by Maran | 1726 | 1 |
Origen | Ch. de la Rue (1, 2, 3) V. de la Rue (4) | 1733-1759 | 4 |
Justin and the Apologists | Maran | 1742 | 1 |
Gregory Nazianzen3 | Maran and Clémencet | 1778 | 1912 |
| II.—Biblical Works | |||
St Jerome’s Latin Bible | Martianay | 1693 | 1 |
Origen’s Hexapla | Montfaucon | 1713 | 2 |
Old Latin versions | Sabbathier | 1743-1749 | 3 |
| III.—Great Collections of Documents | |||
Spicilegium | d’Achery | 1655-1677 | 13 in 4to |
Veterae analecta | Mabillon | 1675-1685 | 4 in 8vo |
Musaeum italicum | Mabillon | 1687-1689 | 2 in 4to |
Collectio nova patrum graecorum | Montfaucon | 1706 | 2 |
Thesaurus novus anecdotorum | Martène and Durand | 1717 | 5 |
Veterum scriptorum collectio | Martène and Durand | 1724-1733 | 9 |
De antiquis ecclesiaeritibus | Martène | 1690-1706 | |
| (Final form) | 1736-1738 | 4 |
| IV.—Monastic History | |||
Acta of the Benedictine Saints | d’Achery, Mabillon and Ruinart | 1668-1701 | 9 |
Benedictine Annals (to 1157) | Mabillon (1-4), Massuet (5), Martène (6) | 1703-1739 | 6 |
| V.—Ecclesiastical History and Antiquities of France | |||
| A.—General. | |||
Gallia Christiana (3 other vols. were published 1856-1865) | Sainte-Marthe (1, 2, 3) | 1715-1785 | 13 |
Monuments de la monarchie française | Montfaucon | 1729-1733 | 5 |
Histoire littéraire de la France (16 other vols. were published 1814-1881) | Rivet, Clémencet, Clément | 1733-1763 | 12 in 4to |
Recueil des historiens de la France (4 other vols. were published 1840-1876) | Bouquet (1-8), Brial (12-19) | 1738-1833 | 19 |
Concilia Galliae (the printing of vol. ii. was interrupted by the Revolution; there were to have been 8 vols.) | Labbat | 1789 | 1 |
| B.—Histories of the Provinces. | |||
Bretagne | Lobineau | 1707 | 2 |
Paris | Félibien and Lobineau | 1725 | 5 |
Languedoc | Vaissette and de Vic | 1730-1745 | 5 |
Bourgogne | Plancher (1-3), Merle (4) | 1739-1748, 1781 | 4 |
Bretagne | Morice | 1742-1756 | 5 |
| VI.—Miscellaneous Works of Technical Erudition | |||
De re diplomatica | Mabillon | 1681 | 1 |
Ditto Supplement | Mabillon | 1704 | 1 |
Nouveau traité de diplomatique | Toustain and Tassin | 1750-1765 | 6 in 4to |
Paleographia graeca | Montfaucon | 1708 | 1 |
Bibliotheca coisliniana | Montfaucon | 1715 | 1 |
Bibliotheca bibliothecarum manuscriptorum nova | Montfaucon | 1739 | 2 |
L’Antiquité expliqué | Montfaucon | 1719-1724 | 15 |
New ed. of Du Cange’s glossarium | Dantine and Carpentier | 1733-1736 | 6 |
Ditto Supplement | Carpentier | 1766 | 4 |
Apparatus ad bibliothecam maximam patrum | le Nourry | 1703 | 2 |
L’Art de vérifier les dates | Dantine, Durand, Clémencet | 1750 | 1 in 4to |
Ed. 2 | Clément | 1770 | 1 |
Ed. 3 | Clément | 1783-1787 | 3 |
The 58 works in the above list comprise 199 great folio volumes and 39 in 4to or 8vo. The full Maurist bibliography contains the names of some 220 writers and more than 700 works. The lesser works in large measure cover the same fields as those in the list, but the number of works of purely religious character, of piety, devotion and edification, is very striking. Perhaps the most wonderful phenomenon of Maurist work is that what was produced was only a portion of what was contemplated and prepared for. The French Revolution cut short many gigantic undertakings, the collected materials for which fill hundreds of manuscript volumes in the Bibliothèque nationale of Paris and other libraries of France. There are at Paris 31 volumes of Berthereau’s materials for the Historians of the Crusades, not only in Latin and Greek, but in the oriental tongues; from them have been taken in great measure the Recueil des historiens des croisades, whereof 15 folio volumes have been published by the Académie des Inscriptions. There exist also the preparations for an edition of Rufinus and one of Eusebius, and for the continuation of the Papal Letters and of the Concilia Galliae. Dom Caffiaux and Dom Villevielle left 236 volumes of materials for a Trésor généalogique. There are Benedictine Antiquities (37 vols.), a Monasticon Gallicanum and a Monasticon Benedictinum (54 vols.). Of the Histories of the Provinces of France barely half a dozen were printed, but all were in hand, and the collections for the others fill 800 volumes of MSS. The materials for a geography of Gaul and France in 50 volumes perished in a fire during the Revolution.
When these figures were considered, and when one contemplates the vastness of the works in progress during any decade of the century 1680-1780; and still more, when not only the quantity but the quality of the work, and the abiding value of most of it is realized, it will be recognized that the output was prodigious and unique in the history of letters, as coming from a single society. The qualities that have made Maurist work proverbial for sound learning are its fine critical tact and its thoroughness.
The chief source of information on the Maurists and their work is Dom Tassin’s Histoire littéraire de la congregation de Saint-Maur (1770); it has been reduced to a bare bibliography and completed by de Lama, Bibliothèque des écrivains de la congr. de S.-M. (1882). The two works of de Broglie, Mabillon (2 vols., 1888) and Montfaucon (2 vols., 1891), give a charming picture of the inner life of the great Maurists of the earlier generation in the midst of their work and their friends. Sketches of the lives of a few of the chief Maurists will be found in McCarthy’s Principal Writers of the Congr. of S. M. (1868). Useful information about their literary undertakings will be found in De Lisle’s Cabinet des MSS. de la Bibl. Nat. Fonds St Germain-des-Prés. General information will be found in the standard authorities: Helyot, Hist. des ordres religieux (1718), vi. c. 37; Heimbucher, Orden und Kongregationen (1907) i. § 36; Wetzer und Welte, Kirchenlexicon (ed. 2) and Herzog-Hauck’s Realencyklopädie (ed. 3), the latter an interesting appreciation by the Protestant historian Otto Zöckler of the spirit and the merits of the work of the Maurists.
1 His festival is kept on the 15th of January. He founded the monastery of Glanfeuil or St Maur-sur-Loire.
2 14 vols. of materials collected for the continuation are at Paris.
3 The printing of vol. ii. was impeded by the Revolution.
MAURITIUS, an island and British colony in the Indian Ocean (known whilst a French possession as the Île de France). It lies between 57° 18′ and 57° 49′ E., and 19° 58′ and 20° 32′ S., 550 m. E. of Madagascar, 2300 m. from the Cape of Good Hope, and 9500 m. from England via Suez. The island is irregularly elliptical—somewhat triangular—in shape, and is 36 m. long from N.N.E. to S.S.W., and about 23 m. broad. It is 130 m. in circumference, and its total area is about 710 sq. m. (For map see Madagascar.) The island is surrounded by coral reefs, so that the ports are difficult of access.
From its mountainous character Mauritius is a most picturesque island, and its scenery is very varied and beautiful. It has been admirably described by Bernardin de St Pierre, who lived in the island towards the close of the 18th century, in Paul et Virginie. The most level portions of the coast districts are the north and north-east, all the rest being broken by hills, which vary from 500 to 2700 ft. in height. The principal mountain masses are the north-western or Pouce range, in the district of Port Louis; the south-western, in the districts of Rivière Noire and Savanne; and the south-eastern range, in the Grand Port district. In the first of these, which consists of one principal ridge with several lateral spurs, overlooking Port Louis, are the singular peak of the Pouce (2650 ft.), so called from its supposed resemblance to the human thumb; and the still loftier Pieter Botte (2685 ft.), a tall obelisk of bare rock, crowned with a globular mass of stone. The highest summit in the island is in the south-western mass of hills, the Piton de la Rivière Noire, which is 2711 ft. above the sea. The south-eastern group of hills consists of the Montagne du Bambou, with several spurs running down to the sea. In the interior are extensive fertile plains, some 1200 ft. in height, forming the districts of Moka, Vacois, and Plaines Wilhelms; and from nearly the centre of the island an abrupt peak, the Piton du Milieu de l’Île rises to a height of 1932 ft. Other prominent summits are the Trois Mamelles, the Montagne du Corps de Garde, the Signal Mountain, near Port Louis, and the Morne Brabant, at the south-west corner of the island.
The rivers are small, and none is navigable beyond a few hundred yards from the sea. In the dry season little more than brooks, they become raging torrents in the wet season. The principal stream is the Grande Rivière, with a course of about 10 m. There is a remarkable and very deep lake, called 913 Grand Bassin, in the south of the island, it is probably the extinct crater of an ancient volcano; similar lakes are the Mare aux Vacois and the Mare aux Joncs, and there are other deep hollows which have a like origin.
Geology.—The island is of volcanic origin, but has ceased to show signs of volcanic activity. All the rocks are of basalt and greyish-tinted lavas, excepting some beds of upraised coral. Columnar basalt is seen in several places. The remains of ancient craters can be distinguished, but their outlines have been greatly destroyed by denudation. There are many caverns and steep ravines, and from the character of the rocks the ascents are rugged and precipitous. The island has few minerals, although iron, lead and copper in very small quantities have in former times been obtained. The greater part of the surface is composed of a volcanic breccia, with here and there lava-streams exposed in ravines, and sometimes on the surface. The commonest lavas are dolerites. In at least two places sedimentary rocks are found at considerable elevations. In the Black River Mountains, at a height of about 1200 ft., there is a clay-slate; and near Midlands, in the Grand Port group of mountains, a chloritic schist occurs about 1700 ft. above the sea, forming the hill of La Selle. This schist is much contorted, but seems to have a general dip to the south or south-east. Evidence of recent elevation of the island is furnished by masses of coral reef and beach coral rock standing at heights of 40 ft. above sea-level in the south, 12 ft. in the north and 7 ft. on the islands situated on the bank extending to the north-east.1
Climate.—The climate is pleasant during the cool season of the year, but oppressively hot in summer (December to April), except in the elevated plains of the interior, where the thermometer ranges from 70° to 80° F., while in Port Louis and on the coast generally it ranges from 90° to 96°. The mean temperature for the year at Port Louis is 78.6°. There are two seasons, the cool and comparatively dry season, from April to November, and the hotter season, during the rest of the year. The climate is now less healthy than it was, severe epidemics of malarial fever having frequently occurred, so that malaria now appears to be endemic among the non-European population. The rainfall varies greatly in different parts of the island. Cluny in the Grand Port (south-eastern) district has a mean annual rainfall of 145 in.; Albion on the west coast is the driest station, with a mean annual rainfall of 31 in. The mean monthly rainfall for the whole island varies from 12 in. in March to 2.6 in. in September and October. The Royal Alfred Observatory is situated at Pamplemousses, on the north-west or dry side of the island. From January to the middle of April, Mauritius, in common with the neighbouring islands and the surrounding ocean from 8° to 30° of southern latitude is subject to severe cyclones, accompanied by torrents of rain, which often cause great destruction to houses and plantations. These hurricanes generally last about eight hours, but they appear to be less frequent and violent than in former times, owing, it is thought, to the destruction of the ancient forests and the consequent drier condition of the atmosphere.
Fauna and Flora.—Mauritius being an oceanic island of small size, its present fauna is very limited in extent. When first seen by Europeans it contained no mammals except a large fruit-eating bat (Pteropus vulgaris), which is plentiful in the woods; but several mammals have been introduced, and are now numerous in the uncultivated region. Among these are two monkeys of the genera Macacus and Cercopithecus, a stag (Cervus hippelaphus), a small hare, a shrew-mouse, and the ubiquitous rat. A lemur and one of the curious hedgehog-like Insectivora of Madagascar (Centetes ecaudatus) have probably both been brought from the larger island. The avifauna resembles that of Madagascar; there are species of a peculiar genus of caterpillar shrikes (Campephagidae), as well as of the genera Pratincola, Hypsipetes, Phedina, Tchitrea, Zosterops, Foudia, Collocalia and Coracopsis, and peculiar forms of doves and parakeets. The living reptiles are small and few in number. The surrounding seas contain great numbers of fish; the coral reefs abound with a great variety of molluscs; and there are numerous land-shells. The extinct fauna of Mauritius has considerable interest. In common with the other Mascarene islands, it was the home of the dodo (Didus ineptus); there were also Aphanapteryx, a species of rail, and a short-winged heron (Ardea megacephala), which probably seldom flew. The defenceless condition of these birds led to their extinction after the island was colonized. Considerable quantities of the bones of the dodo and other extinct birds—a rail (Aphanapteryx), and a short-winged heron—have been discovered in the beds of some of the ancient lakes (see Dodo). Several species of large fossil tortoises have also been discovered; they are quite different from the living ones of Aldabra, in the same zoological region.
Owing to the destruction of the primeval forests for the formation of sugar plantations, the indigenous flora is only seen in parts of the interior plains, in the river valleys and on the hills; and it is not now easy to distinguish between what is native and what has come from abroad. The principal timber tree is the ebony (Diospyros ebeneum), which grows to a considerable size. Besides this there are bois de cannelle, olive-tree, benzoin (Croton Benzoe), colophane (Colophonia), and iron-wood, all of which arc useful in carpentry; the coco-nut palm, an importation, but a tree which has been so extensively planted during the last hundred years that it is extremely plentiful; the palmiste (Palma dactylifera latifolia), the latanier (Corypha umbraculifera) and the date-palm. The vacoa or vacois, (Pandanus utilis) is largely grown, the long tough leaves being manufactured into bags for the export of sugar, and the roots being also made of use; and in the few remnants of the original forests the traveller’s tree (Urania speciosa), grows abundantly. A species of bamboo is very plentiful in the river valleys and in marshy situations. A large variety of fruit is produced, including the tamarind, mango, banana, pine-apple, guava, shaddock, fig, avocado-pear, litchi, custard-apple and the mabolo (Diospyros discolor), a fruit of exquisite flavour, but very disagreeable odour. Many of the roots and vegetables of Europe have been introduced, as well as some of those peculiar to the tropics, including maize, millet, yams, manioc, dhol, gram, &c. Small quantities of tea, rice and sago, have been grown, as well as many of the spices (cloves, nutmeg, ginger, pepper and allspice), and also cotton, indigo, betel, camphor, turmeric and vanilla. The Royal Botanical Gardens at Pamplemousses, which date from the French occupation of the island, contain a rich collection of tropical and extra-tropical species.
Inhabitants.—The inhabitants consist of two great divisions, those of European blood, chiefly French and British, together with numerous half-caste people, and those of Asiatic or African blood. The population of European blood, which calls itself Creole, is greater than that of any other tropical colony; many of the inhabitants trace their descent from ancient French families, and the higher and middle classes are distinguished for their intellectual culture. French is more commonly spoken than English. The Creole class is, however, diminishing, though slowly, and the most numerous section of the population is of Indian blood.
The introduction of Indian coolies to work the sugar plantations dates from the period of the emancipation of the slaves in 1834-1839. At that time the negroes who showed great unwillingness to work on their late masters’ estates, numbered about 66,000. Immigration from India began in 1834, and at a census taken in 1846, when the total population was 158,462, there were already 56,245 Indians in the island. In 1851 the total population had increased to 180,823, while in 1861 it was 310,050. This great increase was almost entirely due to Indian immigration, the Indian population, 77,996 in 1851, being 192,634 in 1861. From that year the increase in the Indian population has been more gradual but steady, while the non-Indian population has decreased. From 102,827 in 1851 it rose to 117,416 in 1861 to sink to 99,784 in 1871. The figures for the three following census years were:—
| 1881. | 1891. | 1901. | |
| Indians | 248,993 | 255,920 | 259,086 |
| Others | 110,881 | 114,668 | 111,937 |
| ——— | ——— | ——— | |
| Total | 359,874 | 370,588 | 371,023 |
| ——— | ——— | ——— |
Including the military and crews of ships in harbour, the total population in 1901 was 373,336.2 This total included 198,958 Indo-Mauritians, i.e. persons of Indian descent born in Mauritius, and 62,022 other Indians. There were 3,509 Chinese, while the remaining 108,847 included persons of European, African or mixed descent, Malagasy, Malays and Sinhalese. The Indian female population increased from 51,019 in 1861 to 115,986 in 1901. In the same period the non-Indian female population but slightly varied, being 56,070 in 1861 and 55,485 in 1901. The Indo-Mauritians are now dominant in commercial, agricultural and domestic callings, and much town and agricultural land has been transferred from the Creole planters to Indians and Chinese. The tendency to an Indian peasant proprietorship is marked. Since 1864 real property to the value of over £1,250,000 has been acquired by Asiatics. Between 1881 and 1901 the number of sugar estates decreased from 171 to 115, those sold being held in small parcels by Indians. The average death-rate for the period 1873-1901 was 32.6 per 1000. The average birth-rate in the Indian community is 37 per 1000; in the non-Indian community 34 per 1000. Many Mauritian Creoles have emigrated to South Africa. The great increase in the population since 1851 has made Mauritius one of the most densely peopled regions of the world, having over 520 persons per square mile.
Chief Towns.—The capital and seat of government, the city of Port Louis, is on the north-western side of the island, in 20° 10′ S., 57° 30′ E. at the head of an excellent harbour, a deep inlet about a mile long, available for ships of the deepest draught. This is protected by Fort William and Fort George, as well as by the citadel (Fort Adelaide), and it has three graving-docks connected with the inner harbour, the depths alongside quays and berths being from 12 to 28 ft. The trade of the island passes almost entirely through the port. Government House is a three-storeyed structure with broad 914 verandas, of no particular style of architecture, while the Protestant cathedral was formerly a powder magazine, to which a tower and spire have been added. The Roman Catholic cathedral is more pretentious in style, but is tawdry in its interior. There are, besides the town-hall, Royal College, public offices and theatre, large barracks and military stores. Port Louis, which is governed by an elective municipal council, is surrounded by lofty hills and its unhealthy situation is aggravated by the difficulty of effective drainage owing to the small amount of tide in the harbour. Though much has been done to make the town sanitary, including the provision of a good water-supply, the death-rate is generally over 44 per 1000. Consequently all those who can make their homes in the cooler uplands of the interior. As a result the population of the city decreased from about 70,000 in 1891 to 53,000 in 1901. The favourite residential town is Curepipe, where the climate resembles that of the south of France. It is built on the central plateau about 20 m. distant from Port Louis by rail and 1800 ft. above the sea. Curepipe was incorporated in 1888 and had a population (1901) of 13,000. On the railway between Port Louis and Curepipe are other residential towns—Beau Bassin, Rose Hill and Quatre Bornes. Mahébourg, pop. (1901), 4810, is a town on the shores of Grand Port on the south-east side of the island, Souillac a small town on the south coast.
Industries.—The Sugar Plantations: The soil of the island is of considerable fertility; it is a ferruginous red clay, but so largely mingled with stones of all sizes that no plough can be used, and the hoe has to be employed to prepare the ground for cultivation. The greater portion of the plains is now a vast sugar plantation. The bright green of the sugar fields is a striking feature in a view of Mauritius from the sea, and gives a peculiar beauty and freshness to the prospect. The soil is suitable for the cultivation of almost all kinds of tropical produce, and it is to be regretted that the prosperity of the colony depends almost entirely on one article of production, for the consequences are serious when there is a failure, more or less, of the sugar crop. Guano is extensively imported as a manure, and by its use the natural fertility of the soil has been increased to a wonderful extent. Since the beginning of the 20th century some attention has been paid to the cultivation of tea and cotton, with encouraging results. Of the exports, sugar amounts on an average to about 95% of the total. The quantity of sugar exported rose from 102,000 tons in 1854 to 189,164 tons in 1877. The competition of beet-sugar and the effect of bounties granted by various countries then began to tell on the production in Mauritius, the average crop for the seven years ending 1900-1901 being only 150,449 tons. The Brussels Sugar Convention of 1902 led to an increase in production, the average annual weight of sugar exported for the three years 1904-1906 being 182,000 tons. The value of the crop was likewise seriously affected by the causes mentioned, and by various diseases which attacked the canes. Thus in 1878 the value of the sugar exported was £3,408,000; in 1888 it had sunk to £1,911,000, and in 1898 to £1,632,000. In 1900 the value was £1,922,000, and in 1905 it had risen to £2,172,000. India and the South African colonies between them take some two-thirds of the total produce. The remainder is taken chiefly by Great Britain, Canada and Hong-Kong. Next to sugar, aloe-fibre is the most important export, the average annual export for the five years ending 1906 being 1840 tons. In addition, a considerable quantity of molasses and smaller quantities of rum, vanilla and coco-nut oil are exported. The imports are mainly rice, wheat, cotton goods, wine, coal, hardware and haberdashery, and guano. The rice comes principally from India and Madagascar; cattle are imported from Madagascar, sheep from South Africa and Australia, and frozen meat from Australia. The average annual value of the exports for the ten years 1896-1905 was £2,153,159; the average annual value of the imports for the same period £1,453,089. These figures when compared with those in years before the beet and bounty-fed sugar had entered into severe competition with cane sugar, show how greatly the island had thereby suffered. In 1864 the exports were valued at £2,249,000; in 1868 at £2,339,000; in 1877 at £4,201,000 and in 1880 at £3,634,000. And in each of the years named the imports exceeded £2,000,000 in value. Nearly all the aloe-fibre exported is taken by Great Britain, and France, while the molasses goes to India. Among the minor exports is that of bambara or sea-slugs, which are sent to Hong-Kong and Singapore. This industry is chiefly in Chinese hands. The great majority of the imports are from Great Britain or British possessions.
The currency of Mauritius is rupees and cents of a rupee, the Indian rupee (= 16d.) being the standard unit. The metric system of weights and measures has been in force since 1878.
Communications.—There is a regular fortnightly steamship service between Marseilles and Port Louis by the Messageries Maritimes, a four-weekly service with Southampton via Cape Town by the Union Castle, and a four-weekly service with Colombo direct by the British India Co.’s boats. There is also frequent communication with Madagascar, Réunion and Natal. The average annual tonnage of ships entering Port Louis is about 750,000 of which five-sevenths is British. Cable communication with Europe, via the Seychelles, Zanzibar and Aden, was established in 1893, and the Mauritius section of the Cape-Australian cable, via Rodriguez, was completed in 1902.
Railways connect all the principal places and sugar estates on the island, that known as the Midland line, 36 miles long, beginning at Port Louis crosses the island to Mahébourg, passing through Curepipe, where it is 1822 ft. above the sea. There are in all over 120 miles of railway, all owned and worked by the government. The first railway was opened in 1864. The roads are well kept and there is an extensive system of tramways for bringing produce from the sugar estates to the railway lines. Traction engines are also largely used. There is a complete telegraphic and telephonic service.
Government and Revenue.—Mauritius is a crown colony. The governor is assisted by an executive council of five official and two elected members, and a legislative council of 27 members, 8 sitting ex officio, 9 being nominated by the governor and 10 elected on a moderate franchise. Two of the elected members represent St Louis, the 8 rural districts into which the island is divided electing each one member. At least one-third of the nominated members must be persons not holding any public office. The number of registered electors in 1908 was 6186. The legislative session usually lasts from April to December. Members may speak either in French or English. The average annual revenue of the colony for the ten years 1896-1905, was £608,245, the average annual expenditure during the same period £663,606. Up to 1854 there was a surplus in hand, but since that time expenditure has on many occasions exceeded income, and the public debt in 1908 was £1,305,000, mainly incurred however on reproductive works.
The island has largely retained the old French laws, the codes civil, de procédure, du commerce, and d’instruction criminelle being still in force, except so far as altered by colonial ordinances. A supreme court of civil and criminal justice was established in 1831 under a chief judge and three puisne judges.
Religion and Education.—The majority of the European inhabitants belong to the Roman Catholic faith. They numbered at the 1901 census 117,102, and the Protestants 6644. Anglicans, Roman Catholics and the Church of Scotland are helped by state grants. At the head of the Anglican community is the bishop of Mauritius; the chief Romanist dignitary is styled bishop of Port Louis. The Mahommedans number over 30,000, but the majority of the Indian coolies are Hindus.
The educational system, as brought into force in 1900, is under a director of public instruction assisted by an advisory committee, and consists of two branches (1) superior or secondary instruction, (2) primary instruction. For primary instruction there are government schools and schools maintained by the Roman Catholics, Protestants and other faiths, to which the government gives grants in aid. In 1908 there were 67 government schools with 8400 scholars and 90 grant schools with 10,200 scholars, besides Hindu schools receiving no grant. The Roman Catholic scholars number 67.72%; the Protestants 3.80%; Mahommedans 8.37%; and Hindus and others 20.11%. Secondary and higher education is given in the Royal College and associated schools at Port Louis and Curepipe.
Defence.—Mauritius occupies an important strategic position on the route between South Africa and India and in relation to Madagascar and East Africa, while in Port Louis it possesses one of the finest harbours in the Indian Ocean. A permanent garrison of some 3000 men is maintained in the island at a cost of about £180,000 per annum. To the cost of the troops Mauritius contributes 51⁄2% of its annual revenue—about £30,000.
History.—Mauritius appears to have been unknown to European nations, if not to all other peoples, until the year 1505, when it was discovered by Mascarenhas, a Portuguese navigator. It had then no inhabitants, and there seem to be no traces of a previous occupation by any people. The island was retained for most of the 16th century by its discoverers, but they made no settlements in it. In 1598 the Dutch took possession, and named the island “Mauritius,” in honour of their stadtholder, Count Maurice of Nassau. It had been previously called by the Portuguese “Ilha do Cerné,” from the belief that it was the island so named by Pliny. But though the Dutch built a fort at Grand Port and introduced a number of slaves and convicts, they made no permanent settlement in Mauritius, finally abandoning the island in 1710. From 1715 to 1767 (when the French government assumed direct control) the island was held by agents of the French East India Company, by whom its name was again changed to “Île de France.” The Company was fortunate in having several able men as governors of its colony, especially the celebrated Mahé de Labourdonnais (q.v.), who made sugar 915 planting the main industry of the inhabitants.3 Under his direction roads were made, forts built, and considerable portions of the forest were cleared, and the present capital, Port Louis, was founded. Labourdonnais also promoted the planting of cotton and indigo, and is remembered as the most enlightened and best of all the French governors. He also put down the maroons or runaway slaves who had long been the pest of the island. The colony continued to rise in value during the time it was held by the French crown, and to one of the intendants,4 Pierre Poivre, was due the introduction of the clove, nutmeg and other spices. Another governor was D’Entrecasteaux, whose name is kept in remembrance by a group of islands east of New Guinea.
During the long war between France and England, at the commencement of the 19th century, Mauritius was a continual source of much mischief to English Indiamen and other merchant vessels; and at length the British government determined upon an expedition for its capture. This was effected in 1810; and upon the restoration of peace in 1814 the possession of the island was confirmed to Britain by the Treaty of Paris. By the eighth article of capitulation it was agreed that the inhabitants should retain their own laws, customs, and religion; and thus the island is still largely French in language, habits, and predilections; but its name has again been changed to that given by the Dutch. One of the most distinguished of the British governors was Sir Robert Farquhar (1810-1823), who did much to abolish the Malagasy slave trade and to establish friendly relations with the rising power of the Hova sovereign of Madagascar. Later governors of note were Sir Henry Barkly (1863-1871), and Sir J. Pope Hennessy (1883-1886 and 1888).
The history of the colony since its acquisition by Great Britain has been one of social and political evolution. At first all power was concentrated in the hands of the governor, but in 1832 a legislative council was constituted on which non-official nominated members served. In 1884-1885 this council was transformed into a partly elected body. Of more importance than the constitutional changes were the economic results which followed the freeing of the slaves (1834-1839)—for the loss of whose labour the planters received over £2,000,000 compensation. Coolies were introduced to supply the place of the negroes, immigration being definitely sanctioned by the government of India in 1842. Though under government control the system of coolie labour led to many abuses. A royal commission investigated the matter in 1871 and since that time the evils which were attendant on the system have been gradually remedied. One result of the introduction of free labour has been to reduce the descendants of the slave population to a small and unimportant class—Mauritius in this respect offering a striking contrast to the British colonies in the West Indies. The last half of the 19th century was, however, chiefly notable in Mauritius for the number of calamities which overtook the island. In 1854 cholera caused the death of 17,000 persons; in 1867 over 30,000 people died of malarial fever; in 1892 a hurricane of terrific violence caused immense destruction of property and serious loss of life; in 1893 a great part of Port Louis was destroyed by fire. There were in addition several epidemics of small-pox and plague, and from about 1880 onward the continual decline in the price of sugar seriously affected the islanders, especially the Creole population. During 1902-1905 an outbreak of surra, which caused great mortality among draught animals, further tried the sugar planters and necessitated government help. Notwithstanding all these calamities the Mauritians, especially the Indo-Mauritians, have succeeded in maintaining the position of the colony as an important sugar-producing country.
Dependencies.—Dependent upon Mauritius and forming part of the colony are a number of small islands scattered over a large extent of the Indian Ocean. Of these the chief is Rodriguez (q.v.), 375 m. east of Mauritius. Considerably north-east of Rodriguez lie the Oil Islands or Chagos archipelago, of which the chief is Diego Garcia (see Chagos). The Cargados, Carayos or St Brandon islets, deeps and shoals, lie at the south end of the Nazareth Bank about 250 m. N.N.E. of Mauritius. Until 1903 the Seychelles, Amirantes, Aldabra and other islands lying north of Madagascar were also part of the colony of Mauritius. In the year named they were formed into a separate colony (see Seychelles). Two islands, Farquhar and Coetivy, though geographically within the Seychelles area, remained dependent on Mauritius, being owned by residents in that island. In 1908, however, Coetivy was transferred to the Seychelles administration. Amsterdam and St Paul, uninhabited islands in the South Indian Ocean, included in an official list of the dependencies of Mauritius drawn up in 1880, were in 1893 annexed by France. The total population of the dependencies of Mauritius was estimated in 1905 at 5400.
Authorities.—F. Leguat, Voyages et aventures en deux isles désertes des Indes orientales (Eng. trans., A New Voyage to the East Indies; London, 1708); Prudham, “England’s Colonial Empire,” vol. i., The Mauritius and its Dependencies (1846); C. P. Lucas, A Historical Geography of the British Colonies, vol. i. (Oxford, 1888); Ch. Grant, History of Mauritius, or the Isle of France and Neighbouring Islands (1801); J. Milbert, Voyage pittoresque à l’Île-de-France, &c., 4 vols. (1812); Aug. Billiard, Voyage aux colonies orientales (1822); P. Beaton, Creoles and Coolies, or Five Years in Mauritius (1859); Paul Chasteau, Histoire et description de l’île Maurice (1860); F. P. Flemyng, Mauritius, or the Isle of France (1862); Ch. J. Boyle, Far Away, or Sketches of Scenery and Society in Mauritius (1867); L. Simonin, Les Pays lointains, notes de voyage (Maurice, &c.) (1867); N. Pike, Sub-Tropical Rambles in the Land of the Aphanapteryx (1873); A. R. Wallace. “The Mascarene Islands,” in ch. xi. vol. i. of The Geographical Distribution of Animals (1876); K. Möbius, F. Richter and E. von Martens, Beiträge zur Meeresfauna der Insel Mauritius und der Seychellen (Berlin, 1880); G. Clark, A Brief Notice of the Fauna of Mauritius (1881); A. d’Épinay, Renseignements pour servir à l’histoire de l’Île de France jusqu’à 1810 (Mauritius, 1890); N. Decotter, Geography of Mauritius and its Dependencies (Mauritius, 1892); H. de Haga Haig, “The Physical Features and Geology of Mauritius” in vol. li., Q. J. Geol. Soc. (1895); the Annual Reports on Mauritius issued by the Colonial Office, London; The Mauritius Almanack published yearly at Port Louis. A map of the island in six sheets on the scale of one inch to a mile was issued by the War Office in 1905.
1 See Geog. Journ. (June 1895), p. 597.
2 The total population of the colony (including dependencies) on the 1st of January 1907 was estimated at 383,206.
3 Labourdonnais is credited by several writers with the introduction of the sugar cane into the island. Leguat, however, mentions it as being cultivated during the Dutch occupation.
4 The régime introduced in 1767 divided the administration between a governor, primarily charged with military matters, and an intendant.
MAURY, JEAN SIFFREIN (1746-1817), French cardinal and archbishop of Paris, the son of a poor cobbler, was born on the 26th of June 1746 at Valréas in the Comtat-Venaissin, the district in France which belonged to the pope. His acuteness was observed by the priests of the seminary at Avignon, where he was educated and took orders. He tried his fortune by writing éloges of famous persons, then a favourite practice; and in 1771 his éloge on Fénelon was pronounced next best to Laharpe’s by the Academy. The real foundation of his fortunes was the success of a panegyric on St Louis delivered before the Academy in 1772, which caused him to be recommended for an abbacy. In 1777 he published under the title of Discours choisis his panegyrics on Saint Louis, Saint Augustine and Fénelon, his remarks on Bossuet and his Essai sur l’éloquence de la chaire, a volume which contains much good criticism, and remains a French classic. The book was often reprinted as Principes de l’éloquence. He became a favourite preacher in Paris, and was Lent preacher at court in 1781, when King Louis XVI. said of his sermon: “If the abbé had only said a few words on religion he would have discussed every possible subject.” In 1781 he obtained the rich priory of Lyons, near Péronne, and in 1785 he was elected to the Academy, as successor of Lefranc de Pompignan. His morals were as loose as those of his great rival Mirabeau, but he was famed in Paris for his wit and gaiety. In 1789 he was elected a member of the states-general by the clergy of the bailliage of Péronne, and from the first proved to be the most able and persevering defender of the ancien régime, although he had drawn up the greater part of the cahier of the clergy of Péronne, which contained a considerable programme of reform. It is said that he attempted to emigrate both in July and in October 1789; but after that time he held firmly to his place, when almost universally deserted by his friends. In the Constituent Assembly he took an active part in every important debate, combating with especial vigour the alienation of the property of the clergy. His life was often in danger, but his ready wit always saved it, and it was said that one bon mot would preserve him for a month. 916 When he did emigrate in 1792 he found himself regarded as a martyr to the church and the king, and was at once named archbishop in partibus, and extra nuncio to the diet at Frankfort, and in 1794 cardinal. He was finally made bishop of Montefiascone, and settled down in that little Italian town—but not for long, for in 1798 the French drove him from his retreat, and he sought refuge in Venice and St Petersburg. Next year he returned to Rome as ambassador of the exiled Louis XVIII. at the papal court. In 1804 he began to prepare his return to France by a well-turned letter to Napoleon, congratulating him on restoring religion to France once more. In 1806 he did return; in 1807 he was again received into the Academy; and in 1810, on the refusal of Cardinal Fesch, was made archbishop of Paris. He was presently ordered by the pope to surrender his functions as archbishop of Paris. This he refused to do. On the restoration of the Bourbons he was summarily expelled from the Academy and from the archiepiscopal palace. He retired to Rome, where he was imprisoned in the castle of St Angelo for six months for his disobedience to the papal orders, and died in 1817, a year or two after his release, of disease contracted in prison and of chagrin. As a critic he was a very able writer, and Sainte-Beuve gives him the credit of discovering Father Jacques Bridayne, and of giving Bossuet his rightful place as a preacher above Massillon; as a politician, his wit and eloquence make him a worthy rival of Mirabeau. He sacrificed too much to personal ambition, yet it would have been a graceful act if Louis XVIII. had remembered the courageous supporter of Louis XVI., and the pope the one intrepid defender of the Church in the states-general.
The Œuvres choisies du Cardinal Maury (5 vols., 1827) contain what is worth preserving. Mgr Ricard has published Maury’s Correspondance diplomatique (2 vols., Lille, 1891). For his life and character see Vie du Cardinal Maury, by Louis Siffrein Maury, his nephew (1828); J. J. F. Poujoulat, Cardinal Maury, sa vie et ses œuvres (1855); Sainte-Beuve, Causeries du lundi (vol. iv.); Mgr Ricard, L’Abbé Maury (1746-1791), L’Abbé Maury avant 1789, L’Abbé Maury et Mirabeau (1887); G. Bonet-Maury, Le Cardinal Maury d’après ses mémoires et sa correspondance inédits (Paris, 1892); A. Aulard, Les Orateurs de la constituante (Paris, 1882). Of the many libels written against him during the Revolution the most noteworthy are the Petit carême de l’abbé Maury, with a supplement called the Seconde année (1790), and the Vie privée de l’abbé Maury (1790), claimed by J. R. Hébert, but attributed by some writers to Restif de la Bretonne. For further bibliographical details see J. M. Quérard, La France littéraire, vol. v. (1833).
MAURY, LOUIS FERDINAND ALFRED (1817-1892), French scholar, was born at Meaux on the 23rd of March 1817. In 1836, having completed his education, he entered the Bibliothèque Nationale, and afterwards the Bibliothèque de l’Institut (1844), where he devoted himself to the study of archaeology, ancient and modern languages, medicine and law. Gifted with a great capacity for work, a remarkable memory and an unbiassed and critical mind, he produced without great effort a number of learned pamphlets and books on the most varied subjects. He rendered great service to the Académie des Inscriptions et Belles Lettres, of which he had been elected a member in 1857. Napoleon III. employed him in research work connected with the Histoire de César, and he was rewarded, proportionately to his active, if modest, part in this work, with the positions of librarian of the Tuileries (1860), professor at the College of France (1862) and director-general of the Archives (1868). It was not, however, to the imperial favour that he owed these high positions. He used his influence for the advancement of science and higher education, and with Victor Duruy was one of the founders of the École des Hautes Études. He died at Paris four years after his retirement from the last post, on the 11th of February 1892.
Bibliography.—His works are numerous: Les Fées au moyen âge and Histoire des légendes pieuses au moyen âge; two books filled with ingenious ideas, which were published in 1843, and reprinted after the death of the author, with numerous additions under the title Croyances et légendes du moyen âge (1896); Histoire des grandes forêts de la Gaule et de l’ancienne France (1850, a 3rd ed. revised appeared in 1867 under the title Les Forêts de la Gaule et de l’ancienne France); La Terre et l’homme, a general historical sketch of geology, geography and ethnology, being the introduction to the Histoire universelle, by Victor Duruy (1854); Histoire des religions de la Grèce antique, (3 vols., 1857-1859); La Magie et l’astrologie dans l’antiquité et dans le moyen âge (1863); Histoire de l’ancienne académie des sciences (1864); Histoire de l’Académie des Inscriptions et Belles Lettres (1865); a learned paper on the reports of French archaeology, written on the occasion of the universal exhibition (1867); a number of articles in the Encyclopédie moderne (1846-1851), in Michaud’s Biographie universelle (1858 and seq.), in the Journal des savants in the Revue des deux mondes (1873, 1877, 1879-1880, &c.). A detailed bibliography of his works has been placed by Auguste Longnon at the beginning of the volume Les Croyances et légendes du moyen âge.
MAURY, MATTHEW FONTAINE (1806-1873), American naval officer and hydrographer, was born near Fredericksburg in Spottsylvania county, Virginia, on the 24th of January 1806. He was educated at Harpeth academy, and in 1825 entered the navy as midshipman, circumnavigating the globe in the “Vincennes,” during a cruise of four years (1826-1830). In 1831 he was appointed master of the sloop “Falmouth” on the Pacific station, and subsequently served in other vessels before returning home in 1834, when he married his cousin, Ann Herndon. In 1835-1836 he was actively engaged in producing for publication a treatise on navigation, a remarkable achievement at so early a stage in his career; he was at this time made lieutenant, and gazetted astronomer to a South Sea exploring expedition, but resigned this position and was appointed to the survey of southern harbours. In 1839 he met with an accident which resulted in permanent lameness, and unfitted him for active service. In the same year, however, he began to write a series of articles on naval reform and other subjects, under the title of Scraps from the Lucky-Bag, which attracted much attention; and in 1841 he was placed in charge of the Dépôt of Charts and Instruments, out of which grew the United States Naval Observatory and the Hydrographie Office. He laboured assiduously to obtain observations as to the winds and currents by distributing to captains of vessels specially prepared log-books; and in the course of nine years he had collected a sufficient number of logs to make two hundred manuscript volumes, each with about two thousand five hundred days’ observations. One result was to show the necessity for combined action on the part of maritime nations in regard to ocean meteorology. This led to an international conference at Brussels in 1853, which produced the greatest benefit to navigation as well as indirectly to meteorology. Maury attempted to organize co-operative meteorological work on land, but the government did not at this time take any steps in this direction. His oceanographical work, however, received recognition in all parts of the civilized world, and in 1855 it was proposed in the senate to remunerate him, but in the same year the Naval Retiring Board, erected under an act to promote the efficiency of the navy, placed him on the retired list. This action aroused wide opposition, and in 1858 he was reinstated with the rank of commander as from 1855. In 1853 Maury had published his Letters on the Amazon and Atlantic Slopes of South America, and the most widely popular of his works, the Physical Geography of the Sea, was published in London in 1855, and in New York in 1856; it was translated into several European languages. On the outbreak of the American Civil War in 1861, Maury threw in his lot with the South, and became head of coast, harbour and river defences. He invented an electric torpedo for harbour defence, and in 1862 was ordered to England to purchase torpedo material, &c. Here he took active part in organizing a petition for peace to the American people, which was unsuccessful. Afterwards he became imperial commissioner of emigration to the emperor Maximilian of Mexico, and attempted to form a Virginian colony in that country. Incidentally he introduced there the cultivation of cinchona. The scheme of colonization was abandoned by the emperor (1866), and Maury, who had lost nearly his all during the war, settled for a while in England, where he was presented with a testimonial raised by public subscription, and among other honours received the degree of LL.D. of Cambridge University (1868). In the same year, a general amnesty admitting of his return to America, he accepted the professorship of meteorology in the Virginia Military Institute, and settled at Lexington, Virginia, where he died on the 1st of February 1873.
Among works published by Maury, in addition to those mentioned, are the papers contributed by him to the Astronomical Observations of the United States Observatory, Letter concerning Lanes for Steamers crossing the Atlantic (1855); Physical Geography (1864) and Manual of Geography (1871). In 1859 he began the publication of a series of Nautical Monographs.
See Diana Fontaine Maury Corbin (his daughter), Life of Matthew Fontaine Maury (London, 1888).
MAUSOLEUM, the term given to a monument erected to receive the remains of a deceased person, which may sometimes take the form of a sepulchral chapel. The term cenotaph (κενός, empty, τάφος, tomb) is employed for a similar monument where the body is not buried in the structure. The term “mausoleum” originated with the magnificent monument erected by Queen Artemisia in 353 B.C. in memory of her husband King Mausolus, of which the remains were brought to England in 1859 by Sir Charles Newton and placed in the British Museum. The tombs of Augustus and of Hadrian in Rome are perhaps the largest monuments of the kind ever erected.
MAUSOLUS (more correctly Maussollus), satrap and practically ruler of Caria (377-353 B.C.). The part he took in the revolt against Artaxerxes Mnemon, his conquest of a great part of Lycia, Ionia and of several of the Greek islands, his co-operation with the Rhodians and their allies in the war against Athens, and the removal of his capital from Mylasa, the ancient seat of the Carian kings, to Halicarnassus are the leading facts of his history. He is best known from the tomb erected for him by his widow Artemisia. The architects Satyrus and Pythis, and the sculptors Scopas, Leochares, Bryaxis and Timotheus, finished the work after her death. (See Halicarnassus.) An inscription discovered at Mylasa (Böckh, Inscr. gr. ii. 2691 c.) details the punishment of certain conspirators who had made an attempt upon his life at a festival in a temple at Labranda in 353.
See Diod. Sic. xv. 90, 3, xvi. 7, 4, 36, 2; Demosthenes, De Rhodiorum libertate; J. B. Bury, Hist. of Greece (1902), ii. 271; W. Judeich, Kleinasiatische Studien (Marburg, 1892), pp. 226-256, and authorities under Halicarnassus.
MAUVE, ANTON (1838-1888), Dutch landscape painter, was born at Zaandam, the son of a Baptist minister. Much against the wish of his parents he took up the study of art and entered the studio of Van Os, whose dry academic manner had, however, but little attraction for him. He benefited far more by his intimacy with his friends Jozef Israels and W. Maris. Encouraged by their example he abandoned his early tight and highly finished manner for a freer, looser method of painting, and the brilliant palette of his youthful work for a tender lyric harmony which is generally restricted to delicate greys, greens, and light blue. He excelled in rendering the soft hazy atmosphere that lingers over the green meadows of Holland, and devoted himself almost exclusively to depicting the peaceful rural life of the fields and country lanes of Holland—especially of the districts near Oosterbeck and Wolfhezen, the sand dunes of the coast at Scheveningen, and the country near Laren, where he spent the last years of his life. A little sad and melancholy, his pastoral scenes are nevertheless conceived in a peaceful soothing lyrical mood, which is in marked contrast to the epic power and almost tragic intensity of J. F. Millet. There are fourteen of Mauve’s pictures at the Mesdag Museum at the Hague, and two (“Milking Time” and “A Fishing Boat putting to Sea”) at the Ryks Museum in Amsterdam. The Glasgow Corporation Gallery owns his painting of “A Flock of Sheep.” The finest and most representative private collection of pictures by Mauve was made by Mr J. C. J. Drucker, London.
MAVROCORDATO, Mavrocordat or Mavrogordato, the name of a family of Phanariot Greeks, distinguished in the history of Turkey, Rumania and modern Greece. The family was founded by a merchant of Chios, whose son Alexander Mavrocordato (c. 1636-1709), a doctor of philosophy and medicine of Bologna, became dragoman to the sultan in 1673, and was much employed in negotiations with Austria. It was he who drew up the treaty of Karlowitz (1699). He became a secretary of state, and was created a count of the Holy Roman Empire. His authority, with that of Hussein Kupruli and Rami Pasha, was supreme at the court of Mustapha II., and he did much to ameliorate the condition of the Christians in Turkey. He was disgraced in 1703, but was recalled to court by Sultan Ahmed III. He left some historical, grammatical, &c. treatises of little value.
His son Nicholas Mavrocordato (1670-1730) was grand dragoman to the Divan (1697), and in 1708 was appointed hospodar (prince) of Moldavia. Deposed, owing to the sultan’s suspicions, in favour of Demetrius Cantacuzene, he was restored in 1711, and soon afterwards became hospodar of Walachia. In 1716 he was deposed by the Austrians, but was restored after the peace of Passarowitz. He was the first Greek set to rule the Danubian principalities, and was responsible for establishing the system which for a hundred years was to make the name of Greek hateful to the Rumanians. He introduced Greek manners, the Greek language and Greek costume, and set up a splendid court on the Byzantine model. For the rest he was a man of enlightenment, founded libraries and was himself the author of a curious work entitled Περὶ καθήκοντων (Bucharest, 1719). He was succeeded as grand dragoman (1709) by his son John (Ioannes), who was for a short while hospodar of Moldavia, and died in 1720.
Nicholas Mavrocordato was succeeded as prince of Walachia in 1730 by his son Constantine. He was deprived in the same year, but again ruled the principality from 1735 to 1741 and from 1744 to 1748; he was prince of Moldavia from 1741 to 1744 and from 1748 to 1749. His rule was distinguished by numerous tentative reforms in the fiscal and administrative systems. He was wounded and taken prisoner in the affair of Galati during the Russo-Turkish War, on the 5th of November 1769, and died in captivity.
Prince Alexander Mavrocordato (1791-1865), Greek statesman, a descendant of the hospodars, was born at Constantinople on the 11th of February 1791. In 1812 he went to the court of his uncle Ioannes Caradja, hospodar of Walachia, with whom he passed into exile in Russia and Italy (1817). He was a member of the Hetairia Philike and was among the Phanariot Greeks who hastened to the Morea on the outbreak of the War of Independence in 1821. He was active in endeavouring to establish a regular government, and in January 1822 presided over the first Greek national assembly at Epidaurus. He commanded the advance of the Greeks into western Hellas the same year, and suffered a defeat at Peta on the 16th of July, but retrieved this disaster somewhat by his successful resistance to the first siege of Missolonghi (Nov. 1822 to Jan. 1823). His English sympathies brought him, in the subsequent strife of factions, into opposition to the “Russian” party headed by Demetrius Ypsilanti and Kolokotrones; and though he held the portfolio of foreign affairs for a short while under the presidency of Petrobey (Petros Mavromichales), he was compelled to withdraw from affairs until February 1825, when he again became a secretary of state. The landing of Ibrahim Pasha followed, and Mavrocordato again joined the army, only escaping capture in the disaster at Sphagia (Spakteria), on the 9th of May 1815, by swimming to Navarino. After the fall of Missolonghi (April 22, 1826) he went into retirement, until President Capo d’Istria made him a member of the committee for the administration of war material, a position he resigned in 1828. After Capo d’Istria’s murder (Oct. 9, 1831) and the resignation of his brother and successor, Agostino Capo d’Istria (April 13, 1832), Mavrocordato became minister of finance. He was vice-president of the National Assembly at Argos (July, 1832), and was appointed by King Otto minister of finance, and in 1833 premier. From 1834 onwards he was Greek envoy at Munich, Berlin, London and—after a short interlude as premier in Greece in 1841—Constantinople. In 1843, after the revolution of September, he returned to Athens as minister without portfolio in the Metaxas cabinet, and from April to August 1844 was head of the government formed after the fall of the “Russian” party. Going into opposition, he distinguished himself by his violent attacks on the Kolettis government. In 1854-1855 he was again head of the government for a few months. He died in Aegina on the 18th of August 1865.
See E. Legrand, Genealogie des Mavrocordato (Paris, 1886).
MAWKMAI (Burmese Maukmè), one of the largest states in the eastern division of the southern Shan States of Burma. It lies approximately between 19° 30′ and 20° 30′ N. and 97° 30′ and 98° 15′ E., and has an area of 2,787 sq. m. The central portion of the state consists of a wide plain well watered and under rice cultivation. The rest is chiefly hills in ranges running north and south. There is a good deal of teak in the state, but it has been ruinously worked. The sawbwa now works as contractor for government, which takes one-third of the net profits. Rice is the chief crop, but much tobacco of good quality is grown in the Langkö district on the Têng river. There is also a great deal of cattle-breeding. The population in 1901 was 29,454, over two-thirds of whom were Shans and the remainder Taungthu, Burmese, Yangsek and Red Karens. The capital, Mawkmai, stands in a fine rice plain in 20° 9′ N. and 97° 25′ E. It had about 150 houses when it first submitted in 1887, but was burnt out by the Red Karens in the following year. It has since recovered. There are very fine orange groves a few miles south of the town at Kantu-awn, called Kadugate by the Burmese.
MAXENTIUS, MARCUS AURELIUS VALERIUS, Roman emperor from A.D. 306 to 312, was the son of Maximianus Herculius, and the son-in-law of Galerius. Owing to his vices and incapacity he was left out of account in the division of the empire which took place in 305. A variety of causes, however, had produced strong dissatisfaction at Rome with many of the arrangements established by Diocletian, and on the 28th of October 306, the public discontent found expression in the massacre of those magistrates who remained loyal to Flavius Valerius Severus and in the election of Maxentius to the imperial dignity. With the help of his father, Maxentius was enabled to put Severus to death and to repel the invasion of Galerius; his next steps were first to banish Maximianus, and then, after achieving a military success in Africa against the rebellious governor, L. Domitius Alexander, to declare war against Constantine as having brought about the death of his father Maximianus. His intention of carrying the war into Gaul was anticipated by Constantine, who marched into Italy. Maxentius was defeated at Saxa Rubra near Rome and drowned in the Tiber while attempting to make his way across the Milvian bridge into Rome. He was a man of brutal and worthless character; but although Gibbon’s statement that he was “just, humane and even partial towards the afflicted Christians” may be exaggerated, it is probable that he never exhibited any special hostility towards them.
See De Broglie, L’Église et l’empire Romain au quatrième siècle (1856-1866), and on the attitude of the Romans towards Christianity generally, app. 8 in vol. ii. of J. B. Bury’s edition of Gibbon (Zosimus ii. 9-18; Zonaras xii. 33, xiii. 1; Aurelius Victor, Epit. 40; Eutropius, x. 2).
MAXIM, SIR HIRAM STEVENS (1840- ), Anglo-American engineer and inventor, was born at Sangerville, Maine, U.S.A., on the 5th of February 1840. After serving an apprenticeship with a coachbuilder, he entered the machine works of his uncle, Levi Stevens, at Fitchburg, Massachusetts, in 1864, and four years later he became a draughtsman in the Novelty Iron Works and Shipbuilding Company in New York City. About this period he produced several inventions connected with illumination by gas; and from 1877 he was one of the numerous inventors who were trying to solve the problem of making an efficient and durable incandescent electric lamp, in this connexion introducing the widely-used process of treating the carbon filaments by heating them in an atmosphere of hydrocarbon vapour. In 1880 he came to Europe, and soon began to devote himself to the construction of a machine-gun which should be automatically loaded and fired by the energy of the recoil (see Machine-Gun). In order to realize the full usefulness of the weapon, which was first exhibited in an underground range at Hatton Garden, London, in 1884, he felt the necessity of employing a smokeless powder, and accordingly he devised maximite, a mixture of trinitrocellulose, nitroglycerine and castor oil, which was patented in 1889. He also undertook to make a flying machine, and after numerous preliminary experiments constructed an apparatus which was tried at Bexley Heath, Kent, in 1894. (See Flight.) Having been naturalized as a British subject, he was knighted in 1901. His younger brother, Hudson Maxim (b. 1853), took out numerous patents in connexion with explosives.
MAXIMA AND MINIMA, in mathematics. By the maximum or minimum value of an expression or quantity is meant primarily the “greatest” or “least” value that it can receive. In general, however, there are points at which its value ceases to increase and begins to decrease; its value at such a point is called a maximum. So there are points at which its value ceases to decrease and begins to increase; such a value is called a minimum. There may be several maxima or minima, and a minimum is not necessarily less than a maximum. For instance, the expression (x2 + x + 2)/(x − 1) can take all values from −∞ to −1 and from +7 to +∞, but has, so long as x is real, no value between -1 and +7. Here −1 is a maximum value, and +7 is a minimum value of the expression, though it can be made greater or less than any assignable quantity.
The first general method of investigating maxima and minima seems to have been published in A.D. 1629 by Pierre Fermat. Particular cases had been discussed. Thus Euclid in book III. of the Elements finds the greatest and least straight lines that can be drawn from a point to the circumference of a circle, and in book VI. (in a proposition generally omitted from editions of his works) finds the parallelogram of greatest area with a given perimeter. Apollonius investigated the greatest and least distances of a point from the perimeter of a conic section, and discovered them to be the normals, and that their feet were the intersections of the conic with a rectangular hyperbola. Some remarkable theorems on maximum areas are attributed to Zenodorus, and preserved by Pappus and Theon of Alexandria. The most noteworthy of them are the following:—
1. Of polygons of n sides with a given perimeter the regular polygon encloses the greatest area.
2. Of two regular polygons of the same perimeter, that with the greater number of sides encloses the greater area.
3. The circle encloses a greater area than any polygon of the same perimeter.
4. The sum of the areas of two isosceles triangles on given bases, the sum of whose perimeters is given, is greatest when the triangles are similar.
5. Of segments of a circle of given perimeter, the semicircle encloses the greatest area.
6. The sphere is the surface of given area which encloses the greatest volume.
Serenus of Antissa investigated the somewhat trifling problem of finding the triangle of greatest area whose sides are formed by the intersections with the base and curved surface of a right circular cone of a plane drawn through its vertex.
The next problem on maxima and minima of which there appears to be any record occurs in a letter from Regiomontanus to Roder (July 4, 1471), and is a particular numerical example of the problem of finding the point on a given straight line at which two given points subtend a maximum angle. N. Tartaglia in his General trattato de numeri et mesuri (c. 1556) gives, without proof, a rule for dividing a number into two parts such that the continued product of the numbers and their difference is a maximum.
Fermat investigated maxima and minima by means of the principle that in the neighbourhood of a maximum or minimum the differences of the values of a function are insensible, a method virtually the same as that of the differential calculus, and of great use in dealing with geometrical maxima and minima. His method was developed by Huygens, Leibnitz, Newton and others, and in particular by John Hudde, who investigated maxima and minima of functions of more than one independent variable, and made some attempt to discriminate between maxima and minima, a question first definitely settled, so far as one variable is concerned, by Colin Maclaurin in his Treatise on Fluxions (1742). The method of the differential calculus was perfected by Euler and Lagrange.
John Bernoulli’s famous problem of the “brachistochrone,” or curve of quickest descent from one point to another under 919 the action of gravity, proposed in 1696, gave rise to a new kind of maximum and minimum problem in which we have to find a curve and not points on a given curve. From these problems arose the “Calculus of Variations.” (See Variations, Calculus of.)
The only general methods of attacking problems on maxima and minima are those of the differential calculus or, in geometrical problems, what is practically Fermat’s method. Some problems may be solved by algebra; thus if y = ƒ(x) ÷ φ(x), where ƒ(x) and φ(x) are polynomials in x, the limits to the values of yφ may be found from the consideration that the equation yφ(x) − ƒ(x) = 0 must have real roots. This is a useful method in the case in which φ(x) and ƒ(x) are quadratics, but scarcely ever in any other case. The problem of finding the maximum product of n positive quantities whose sum is given may also be found, algebraically, thus. If a and b are any two real unequal quantities whatever {1⁄2(a + b)}2 > ab, so that we can increase the product leaving the sum unaltered by replacing any two terms by half their sum, and so long as any two of the quantities are unequal we can increase the product. Now, the quantities being all positive, the product cannot be increased without limit and must somewhere attain a maximum, and no other form of the product than that in which they are all equal can be the maximum, so that the product is a maximum when they are all equal. Its minimum value is obviously zero. If the restriction that all the quantities shall be positive is removed, the product can be made equal to any quantity, positive or negative. So other theorems of algebra, which are stated as theorems on inequalities, may be regarded as algebraic solutions of problems on maxima and minima.
For purely geometrical questions the only general method available is practically that employed by Fermat. If a quantity depends on the position of some point P on a curve, and if its value is equal at two neighbouring points P and P′, then at some position between P and P′ it attains a maximum or minimum, and this position may be found by making P and P′ approach each other indefinitely. Take for instance the problem of Regiomontanus “to find a point on a given straight line which subtends a maximum angle at two given points A and B.” Let P and P′ be two near points on the given straight line such that the angles APB and AP′B are equal. Then ABPP′ lie on a circle. By making P and P′ approach each other we see that for a maximum or minimum value of the angle APB, P is a point in which a circle drawn through AB touches the given straight line. There are two such points, and unless the given straight line is at right angles to AB the two angles obtained are not the same. It is easily seen that both angles are maxima, one for points on the given straight line on one side of its intersection with AB, the other for points on the other side. For further examples of this method together with most other geometrical problems on maxima and minima of any interest or importance the reader may consult such a book as J. W. Russell’s A Sequel lo Elementary Geometry (Oxford, 1907).
The method of the differential calculus is theoretically very simple. Let u be a function of several variables x1, x2, x3 ... xn, supposed for the present independent; if u is a maximum or minimum for the set of values x1, x2, x3, ... xn, and u becomes u + δu, when x1, x2, x3 ... xn receive small increments δx1, δx2, ... δxn; then δu must have the same sign for all possible values of δx1, δ2 ... δxn.
Now
| δu = Σ | δu | δx1 + 1⁄2 { Σ | δ2u | δx12 + 2Σ | δ2u | δx1δx2 ... } + .... |
| δx1 | δx12 | δx1δx2 |
The sign of this expression in general is that of Σ(δu/δx1)δx1, which cannot be one-signed when x1, x2, ... xn can take all possible values, for a set of increments δx1, δx2 ... δxn, will give an opposite sign to the set −δx1, −δx2, ... −δxn. Hence Σ(δu/δx1)δx1 must vanish for all sets of increments δx1, ... δxn, and since these are independent, we must have δu/δx1 = 0, δu/δx2 = 0, ... δu/δxn = 0. A value of u given by a set of solutions of these equations is called a “critical value” of u. The value of δu now becomes
| 1⁄2 { Σ | δ2u | δx12 + 2 Σ | δ2u | δx1δx2 + ... }; |
| δx12 | δx1δx2 |
for u to be a maximum or minimum this must have always the same sign. For the case of a single variable x, corresponding to a value of x given by the equation du/dx = 0, u is a maximum or minimum as d2u/dx2 is negative or positive. If d2u/dx2 vanishes, then there is no maximum or minimum unless d2u/dx2 vanishes, and there is a maximum or minimum according as d4u/dx4 is negative or positive. Generally, if the first differential coefficient which does not vanish is even, there is a maximum or minimum according as this is negative or positive. If it is odd, there is no maximum or minimum.
In the case of several variables, the quadratic
| Σ | δ2u | δx12 + 2 Σ | δ2u | δx1δx2 + ... |
| δx12 | δx1δx2 |
must be one-signed. The condition for this is that the series of discriminants
| a11 , | a11 a12 | , | a11 a12 a13 | , ... |
| a21 a22 | a21 a22 a23 | |||
| a31 a32 a33 |
where apq denotes δ2u/δapδaq should be all positive, if the quadratic is always positive, and alternately negative and positive, if the quadratic is always negative. If the first condition is satisfied the critical value is a minimum, if the second it is a maximum. For the case of two variables the conditions are
| δ2u | · | δ2u | > ( | δ2u | )2 |
| δx12 | δx22 | δx1δx2 |
for a maximum or minimum at all and δ2u/δx12 and δ2u/δx22 both negative for a maximum, and both positive for a minimum. It is important to notice that by the quadratic being one-signed is meant that it cannot be made to vanish except when δx1, δx2, ... δxn all vanish. If, in the case of two variables,
| δ2u | · | δ2u | = ( | δ2u | )2 |
| δx12 | δx22 | δx1δx2 |
then the quadratic is one-signed unless it vanishes, but the value of u is not necessarily a maximum or minimum, and the terms of the third and possibly fourth order must be taken account of.
Take for instance the function u = x2 − xy2 + y2. Here the values x = 0, y = 0 satisfy the equations δu/δx = 0, δu/δy = 0, so that zero is a critical value of u, but it is neither a maximum nor a minimum although the terms of the second order are (δx)2, and are never negative. Here δu = δx2 − δxδy2 + δy2, and by putting δx = 0 or an infinitesimal of the same order as δy2, we can make the sign of δu depend on that of δy2, and so be positive or negative as we please. On the other hand, if we take the function u = x2 − xy2 + y4, x = 0, y = 0 make zero a critical value of u, and here δu = δx2 − δxδy2 + δy4, which is always positive, because we can write it as the sum of two squares, viz. (δx − 1⁄2δy2)2 + 3⁄4δy4; so that in this case zero is a minimum value of u.
A critical value usually gives a maximum or minimum in the case of a function of one variable, and often in the case of several independent variables, but all maxima and minima, particularly absolutely greatest and least values, are not necessarily critical values. If, for example, x is restricted to lie between the values a and b and φ′(x) = 0 has no roots in this interval, it follows that φ′(x) is one-signed as x increases from a to b, so that φ(x) is increasing or diminishing all the time, and the greatest and least values of φ(x) are φ(a) and φ(b), though neither of them is a critical value. Consider the following example: A person in a boat a miles from the nearest point of the beach wishes to reach as quickly as possible a point b miles from that point along the shore. The ratio of his rate of walking to his rate of rowing is cosec α. Where should he land?
Here let AB be the direction of the beach, A the nearest point to the boat O, and B the point he wishes to reach. Clearly he must land, if at all, between A and B. Suppose he lands at P. Let the angle AOP be θ, so that OP = a secθ, and PB = b − a tan θ. If his rate of rowing is V miles an hour his time will be a sec θ/V + (b − a tan θ) sin α/V hours. Call this T. Then to the first power of δθ, δT = (a/V) sec2θ (sin θ − sin α)δθ, so that if AOB > α, δT and δθ have opposite signs from θ = 0 to θ = α, and the same signs from θ = α to θ = AOB. So that when AOB is > α, T decreases from θ = 0 to θ = α, and then increases, so that he should land at a point distant a tan α from A, unless a tan α > b. When this is the case, δT and δθ have opposite signs throughout the whole range of θ, so that T decreases as θ increases, and he should row direct to B. In the first case the minimum value of T is also a critical value; in the second case it is not.
The greatest and least values of the bending moments of loaded rods are often at the extremities of the divisions of the rods and not at points given by critical values.
In the case of a function of several variables, X1, x2, ... xn, not independent but connected by m functional relations u1 = 0, u2 = 0, ..., um = 0, we might proceed to eliminate m of the variables; but Lagrange’s “Method of undetermined Multipliers” is more elegant and generally more useful.
We have δu1 = 0, δu2 = 0, ..., δum = 0. Consider instead of δu, what is the same thing, viz., δu + λ1δu1 + λ2δu2 + ... + λmδum, where λ1, λ2, ... λm, are arbitrary multipliers. The terms of the first order in this expression are
| Σ | δu | δx1 + λ1 Σ | δu1 | δx1 + ... + λm Σ | δum | δx1. |
| δx1 | δx1 | δx1 |
We can choose λ1, ... λm, to make the coefficients of δx1, δx2, ... δxm, vanish, and the remaining δxm+1 to δxn may be regarded as independent, so that, when u has a critical value, their coefficients must also vanish. So that we put
| δu | + | δu1 | + ... + λm | δum | = 0 |
| δxr | δxr | δxr |
for all values of r. These equations with the equations u1 = 0, ..., um = 0 are exactly enough to determine λ1, ..., λm, x1 x2, ..., xn, so that we find critical values of u, and examine the terms of the second order to decide whether we obtain a maximum or minimum.
To take a very simple illustration; consider the problem of determining the maximum and minimum radii vectors of the ellipsoid x2/a2 + y2/b2 + z2/c2 = 1, where a2 > b2 > c2. Here we require the maximum and minimum values of x2 + y2 + z2 where x2/a2 + y2/b2 + z2/c2 = 1.
We have
| δu = 2xδx ( 1 + | λ | ) + 2yδy ( | λ | ) + 2zδz ( | λ | ) |
| a2 | b2 | c2 |
| + δx2 ( 1 + | λ | ) + δy2 ( | λ | ) + δz2 ( | λ | ). |
| a2 | b2 | c2 |
To make the terms of the first order disappear, we have the three equations:—
x (1 + λ/a2) = 0, y (1 + λ/b2) = 0, z (1 + λ/c2) = 0.
These have three sets of solutions consistent with the conditions x2/a2 + y2/b2 + z2/c2 = 1, a2 > b2 > c2, viz.:—
| (1) y = 0, z = 0, λ = −a2; (2) z = 0, x = 0, λ = −b2; |
| (3) x = 0, y = 0, λ = −c2. |
In the case of (1) δu = δy2 (1 − a2/b2) + δz2 (1 − a2/c2), which is always negative, so that u = a2 gives a maximum.
In the case of (3) δu = δx2 (1 − c2/a2) + δy2 (1 − c2/b2), which is always positive, so that u = c2 gives a minimum.
In the case of (2) δu = δx2 (1 − b2/a2) − δz2(b2/c2 − 1), which can be made either positive or negative, or even zero if we move in the planes x2 (1 − b2/a2) = z2 (b2/c2 − 1), which are well known to be the central planes of circular section. So that u = b2, though a critical value, is neither a maximum nor minimum, and the central planes of circular section divide the ellipsoid into four portions in two of which a2 > r2 > b2, and in the other two b2 > r2 > c2.
MAXIMIANUS, a Latin elegiac poet who flourished during the 6th century A.D. He was an Etruscan by birth, and spent his youth at Rome, where he enjoyed a great reputation as an orator. At an advanced age he was sent on an important mission to the East, perhaps by Theodoric, if he is the Maximianus to whom that monarch addressed a letter preserved in Cassiodorus (Variarum, i. 21). The six elegies extant under his name, written in old age, in which he laments the loss of his youth, contain descriptions of various amours. They show the author’s familiarity with the best writers of the Augustan age.
Editions by J. C. Wernsdorf, Poetae latini minores, vi.; E. Bährens, Poetae latini minores, v.; M. Petschenig (1890), in C. F. Ascherson’s Berliner Studien, xi.; R. Webster (Princeton, 1901; see Classical Review, Oct. 1901), with introduction and commentary; see also Robinson Ellis in American Journal of Philology, v. (1884) and Teuffel-Schwabe, Hist. of Roman Literature (Eng. trans.), § 490. There is an English version (as from Cornelius Gallus), by Hovenden Walker (1689), under the title of The Impotent Lover.
MAXIMIANUS, MARCUS AURELIUS VALERIUS, surnamed Herculius, Roman emperor from A.D. 286 to 305, was born of humble parents at Sirmium in Pannonia. He achieved distinction during long service in the army, and having been made Caesar by Diocletian in 285, received the title of Augustus in the following year (April 1, 286). In 287 he suppressed the rising of the peasants (Bagaudae) in Gaul, but in 289, after a three years’ struggle, his colleague and he were compelled to acquiesce in the assumption by his lieutenant Carausius (who had crossed over to Britain) of the title of Augustus. After 293 Maximianus left the care of the Rhine frontier to Constantius Chlorus, who had been designated Caesar in that year, but in 297 his arms achieved a rapid and decisive victory over the barbarians of Mauretania, and in 302 he shared at Rome the triumph of Diocletian, the last pageant of the kind ever witnessed by that city. On the 1st of May 305, the day of Diocletian’s abdication, he also, but without his colleague’s sincerity, divested himself of the imperial dignity at Mediolanum (Milan), which had been his capital, and retired to a villa in Lucania; in the following year, however, he was induced by his son Maxentius to reassume the purple. In 307 he brought the emperor Flavius Valerius Severus a captive to Rome, and also compelled Galerius to retreat, but in 308 he was himself driven by Maxentius from Italy into Illyricum, whence again he was compelled to seek refuge at Arelate (Arles), the court of his son-in-law, Constantine. Here a false report was received, or invented, of the death of Constantine, at that time absent on the Rhine. Maximianus at once grasped at the succession, but was soon driven to Massilia (Marseilles), where, having been delivered up to his pursuers, he strangled himself.
See Zosimus ii. 7-11; Zonaras xii. 31-33; Eutropius ix. 20, x. 2, 3; Aurelius Victor p. 39. For the emperor Galerius Valerius Maximianus see Galerius.
MAXIMILIAN I. (1573-1651), called “the Great,” elector and duke of Bavaria, eldest son of William V. of Bavaria, was born at Munich on the 17th of April 1573. He was educated by the Jesuits at the university of Ingolstadt, and began to take part in the government in 1591. He married in 1595 his cousin, Elizabeth, daughter of Charles II., duke of Lorraine, and became duke of Bavaria upon his father’s abdication in 1597. He refrained from any interference in German politics until 1607, when he was entrusted with the duty of executing the imperial ban against the free city of Donauwörth, a Protestant stronghold. In December 1607 his troops occupied the city, and vigorous steps were taken to restore the supremacy of the older faith. Some Protestant princes, alarmed at this action, formed a union to defend their interests, which was answered in 1609 by the establishment of a league, in the formation of which Maximilian took an important part. Under his leadership an army was set on foot, but his policy was strictly defensive and he refused to allow the league to become a tool in the hands of the house of Habsburg. Dissensions among his colleagues led the duke to resign his office in 1616, but the approach of trouble brought about his return to the league about two years later.
Having refused to become a candidate for the imperial throne in 1619, Maximilian was faced with the complications arising from the outbreak of war in Bohemia. After some delay he made a treaty with the emperor Ferdinand II. in October 1619, and in return for large concessions placed the forces of the league at the emperor’s service. Anxious to curtail the area of the struggle, he made a treaty of neutrality with the Protestant Union, and occupied Upper Austria as security for the expenses of the campaign. On the 8th of November 1620 his troops under Count Tilly defeated the forces of Frederick, king of Bohemia and count palatine of the Rhine, at the White Hill near Prague. In spite of the arrangement with the union Tilly then devastated the Rhenish Palatinate, and in February 1623 Maximilian was formally invested with the electoral dignity and the attendant office of imperial steward, which had been enjoyed since 1356 by the counts palatine of the Rhine. After receiving the Upper Palatinate and restoring Upper Austria to Ferdinand, Maximilian became leader of the party which sought to bring about Wallenstein’s dismissal from the imperial service. At the diet of Regensburg in 1630 Ferdinand was compelled to assent to this demand, but the sequel was disastrous both for Bavaria and its ruler. Early in 1632 the Swedes marched into the duchy and occupied Munich, and Maximilian could only obtain the assistance of the imperialists by placing himself under the orders of Wallenstein, now restored to the command of the emperor’s forces. The ravages of the Swedes and their French allies induced the elector to enter into negotiations for peace with Gustavus Adolphus and Cardinal Richelieu. He also proposed to disarm the Protestants by modifying the Restitution edict of 1629; but these efforts were abortive. In March 1647 he concluded an armistice with France and Sweden at Ulm, but the entreaties of the emperor Ferdinand III. led him to disregard his undertaking. Bavaria was again ravaged, and the elector’s forces defeated in May 1648 at Zusmarshausen. But the peace of Westphalia soon put an end to the struggle. By this treaty it was agreed that Maximilian should retain the electoral dignity, which was made hereditary in his family; and the Upper Palatinate was incorporated with Bavaria. The elector died at Ingolstadt on the 27th of September 1651. By his second wife, 921 Maria Anne, daughter of the emperor Ferdinand II., he left two sons, Ferdinand Maria, who succeeded him, and Maximilian Philip. In 1839 a statue was erected to his memory at Munich by Louis I., king of Bavaria. Weak in health and feeble in frame, Maximilian had high ambitions both for himself and his duchy, and was tenacious and resourceful in prosecuting his designs. As the ablest prince of his age he sought to prevent Germany from becoming the battleground of Europe, and although a rigid adherent of the Catholic faith, was not always subservient to the priest.
See P. P. Wolf, Geschichte Kurfürst Maximilians I. und seiner Zeit (Munich, 1807-1809); C. M. Freiherr von Aretin, Geschichte des bayerschen Herzogs und Kurfürsten Maximilian des Ersten (Passau, 1842); M. Lossen, Die Reichstadt Donauwörth und Herzog Maximilian (Munich, 1866); F. Stieve, Kurfürst Maximilian I. von Bayern (Munich, 1882); F. A. W. Schreiber, Maximilian I. der Katholische Kurfürst von Bayern, und der dreissigjährige Krieg (Munich, 1868); M. Högl, Die Bekehrung der Oberpfalz durch Kurfürst Maximilian I. (Regensburg, 1903).
MAXIMILIAN I. (Maximilian Joseph) (1756-1825), king of Bavaria, was the son of the count palatine Frederick of Zweibrücken-Birkenfeld, and was born on the 27th of May 1756. He was carefully educated under the supervision of his uncle, Duke Christian IV. of Zweibrücken, took service in 1777 as a colonel in the French army, and rose rapidly to the rank of major-general. From 1782 to 1789 he was stationed at Strassburg, but at the outbreak of the revolution he exchanged the French for the Austrian service, taking part in the opening campaigns of the revolutionary wars. On the 1st of April 1795 he succeeded his brother, Charles II., as duke of Zweibrücken, and on the 16th of February 1799 became elector of Bavaria on the extinction of the Sulzbach line with the death of the elector Charles Theodore.
The sympathy with France and with French ideas of enlightenment which characterized his reign was at once manifested. In the newly organized ministry Count Max Josef von Montgelas (q.v.), who, after falling into disfavour with Charles Theodore, had acted for a time as Maximilian Joseph’s private secretary, was the most potent influence, an influence wholly “enlightened” and French. Agriculture and commerce were fostered, the laws were ameliorated, a new criminal code drawn up, taxes and imposts equalized without regard to traditional privileges, while a number of religious houses were suppressed and their revenues used for educational and other useful purposes. In foreign politics Maximilian Joseph’s attitude was from the German point of view less commendable. With the growing sentiment of German nationality he had from first to last no sympathy, and his attitude throughout was dictated by wholly dynastic, or at least Bavarian, considerations. Until 1813 he was the most faithful of Napoleon’s German allies, the relation being cemented by the marriage of his daughter to Eugène Beauharnais. His reward came with the treaty of Pressburg (Dec. 26, 1805), by the terms of which he was to receive the royal title and important territorial acquisitions in Swabia and Franconia to round off his kingdom. The style of king he actually assumed on the 1st of January 1806.
The new king of Bavaria was the most important of the princes belonging to the Confederation of the Rhine, and remained Napoleon’s ally until the eve of the battle of Leipzig, when by the convention of Ried (Oct. 8, 1813) he made the guarantee of the integrity of his kingdom the price of his joining the Allies. By the first treaty of Paris (June 3, 1814), however, he ceded Tirol to Austria in exchange for the former duchy of Würzburg. At the congress of Vienna, too, which he attended in person, Maximilian had to make further concessions to Austria, ceding the quarters of the Inn and Hausruck in return for a part of the old Palatinate. The king fought hard to maintain the contiguity of the Bavarian territories as guaranteed at Ried; but the most he could obtain was an assurance from Metternich in the matter of the Baden succession, in which he was also doomed to be disappointed (see Baden: History, iii. 506).
At Vienna and afterwards Maximilian sturdily opposed any reconstitution of Germany which should endanger the independence of Bavaria, and it was his insistence on the principle of full sovereignty being left to the German reigning princes that largely contributed to the loose and weak organization of the new German Confederation. The Federal Act of the Vienna congress was proclaimed in Bavaria, not as a law but as an international treaty. It was partly to secure popular support in his resistance to any interference of the federal diet in the internal affairs of Bavaria, partly to give unity to his somewhat heterogeneous territories, that Maximilian on the 26th of May 1818 granted a liberal constitution to his people. Montgelas, who had opposed this concession, had fallen in the previous year, and Maximilian had also reversed his ecclesiastical policy, signing on the 24th of October 1817 a concordat with Rome by which the powers of the clergy, largely curtailed under Montgelas’s administration, were restored. The new parliament proved so intractable that in 1819 Maximilian was driven to appeal to the powers against his own creation; but his Bavarian “particularism” and his genuine popular sympathies prevented him from allowing the Carlsbad decrees to be strictly enforced within his dominions. The suspects arrested by order of the Mainz Commission he was accustomed to examine himself, with the result that in many cases the whole proceedings were quashed, and in not a few the accused dismissed with a present of money. Maximilian died on the 13th of October 1825 and was succeeded by his son Louis I.
In private life Maximilian was kindly and simple. He loved to play the part of Landesvater, walking about the streets of his capital en bourgeois and entering into conversation with all ranks of his subjects, by whom he was regarded with great affection. He was twice married: (1) in 1785 to Princess Wilhelmine Auguste of Hesse-Darmstadt, (2) in 1797 to Princess Caroline Friederike of Baden.
See G. Freiherr von Lerchenfeld, Gesch. Bayerns unter König Maximilian Joseph I. (Berlin, 1854); J. M. Söltl, Max Joseph, König von Bayern (Stuttgart, 1837); L. von Kobell, Unter den vier ersten Königen Bayerns. Nach Briefen und eigenen Erinnerungen (Munich, 1894).
MAXIMILIAN II. (1811-1864), king of Bavaria, son of king Louis I. and of his consort Theresa of Saxe-Hildburghausen, was born on the 28th of November 1811. After studying at Göttingen and Berlin and travelling in Germany, Italy and Greece, he was introduced by his father into the council of state (1836). From the first he showed a studious disposition, declaring on one occasion that had he not been born in a royal cradle his choice would have been to become a professor. As crown prince, in the château of Hohenschwangau near Füssen, which he had rebuilt with excellent taste, he gathered about him an intimate society of artists and men of learning, and devoted his time to scientific and historical study. When the abdication of Louis I. (March 28, 1848) called him suddenly to the throne, his choice of ministers promised a liberal régime. The progress of the revolution, however, gave him pause. He strenuously opposed the unionist plans of the Frankfort parliament, refused to recognize the imperial constitution devised by it, and assisted Austria in restoring the federal diet and in carrying out the federal execution in Hesse and Holstein. Although, however, from 1850 onwards his government tended in the direction of absolutism, he refused to become the tool of the clerical reaction, and even incurred the bitter criticism of the Ultramontanes by inviting a number of celebrated men of learning and science (e.g. Liebig and Sybel) to Munich, regardless of their religious views. Finally, in 1859, he dismissed the reactionary ministry of von der Pfordten, and met the wishes of his people for a moderate constitutional government. In his German policy he was guided by the desire to maintain the union of the princes, and hoped to attain this as against the perilous rivalry of Austria and Prussia by the creation of a league of the “middle” and small states—the so-called Trias. In 1863, however, seeing what he thought to be a better way, he supported the project of reform proposed by Austria at the Fürstentag of Frankfort. The failure of this proposal, and the attitude of Austria towards the Confederation and in the Schleswig-Holstein question, undeceived him; but 922 before he could deal with the new situation created by the outbreak of the war with Denmark he died suddenly at Munich, on the 10th of March 1864.
Maximilian was a man of amiable qualities and of intellectual attainments far above the average, but as a king he was hampered by constant ill-health, which compelled him to be often abroad, and when at home to live much in the country. By his wife, Maria Hedwig, daughter of Prince William of Prussia, whom he married in 1842, he had two sons, Louis II., king of Bavaria, and Otto, king of Bavaria, both of whom lost their reason.
See J. M. Söltl, Max der Zweite, König von Bayern (Munich, 1865); biography by G. K. Heigel in Allgem. Deutsche Biographie, vol. xxi. (Leipzig, 1885). Maximilian’s correspondence with Schlegel was published at Stuttgart in 1890.
MAXIMILIAN I. (1459-1519), Roman emperor, son of the emperor Frederick III. and Leonora, daughter of Edward, king of Portugal, was born at Vienna Neustadt on the 22nd of March 1459. On the 18th of August 1477, by his marriage at Ghent to Mary, who had just inherited Burgundy and the Netherlands from her father Charles the Bold, duke of Burgundy, he effected a union of great importance in the history of the house of Habsburg. He at once undertook the defence of his wife’s dominions from an attack by Louis XI., king of France, and defeated the French forces at Guinegatte, the modern Enguinegatte, on the 7th of August 1479. But Maximilian was regarded with suspicion by the states of Netherlands, and after suppressing a rising in Gelderland his position was further weakened by the death of his wife on the 27th of March 1482. He claimed to be recognized as guardian of his young son Philip and as regent of the Netherlands, but some of the states refused to agree to his demands and disorder was general. Maximilian was compelled to assent to the treaty of Arras in 1482 between the states of the Netherlands and Louis XI. This treaty provided that Maximilian’s daughter Margaret should marry Charles, the dauphin of France, and have for her dowry Artois and Franche-Comté, two of the provinces in dispute, while the claim of Louis on the duchy of Burgundy was tacitly admitted. Maximilian did not, however, abandon the struggle in the Netherlands. Having crushed a rebellion at Utrecht, he compelled the burghers of Ghent to restore Philip to him in 1485, and returning to Germany was chosen king of the Romans, or German king, at Frankfort on the 16th of February 1486, and crowned at Aix-la-Chapelle on the 9th of the following April. Again in the Netherlands, he made a treaty with Francis II., duke of Brittany, whose independence was threatened by the French regent, Anne of Beaujeu, and the struggle with France was soon renewed. This war was very unpopular with the trading cities of the Netherlands, and early in 1488 Maximilian, having entered Bruges, was detained there as a prisoner for nearly three months, and only set at liberty on the approach of his father with a large force. On his release he had promised he would maintain the treaty of Arras and withdraw from the Netherlands; but he delayed his departure for nearly a year and took part in a punitive campaign against his captors and their allies. On his return to Germany he made peace with France at Frankfort in July 1489, and in October several of the states of the Netherlands recognized him as their ruler and as guardian of his son. In March 1490 the county of Tirol was added to his possessions through the abdication of his kinsman, Count Sigismund, and this district soon became his favourite residence.
Meanwhile the king had formed an alliance with Henry VII. king of England, and Ferdinand II., king of Aragon, to defend the possessions of the duchess Anne, daughter and successor of Francis, duke of Brittany. Early in 1490 he took a further step and was betrothed to the duchess, and later in the same year the marriage was celebrated by proxy; but Brittany was still occupied by French troops, and Maximilian was unable to go to the assistance of his bride. The sequel was startling. In December 1491 Anne was married to Charles VIII., king of France, and Maximilian’s daughter Margaret, who had resided in France since her betrothal, was sent back to her father. The inaction of Maximilian at this time is explained by the condition of affairs in Hungary, where the death of king Matthias Corvinus had brought about a struggle for this throne. The Roman king, who was an unsuccessful candidate, took up arms, drove the Hungarians from Austria, and regained Vienna, which had been in the possession of Matthias since 1485; but he was compelled by want of money to retreat, and on the 7th of November 1491 signed the treaty of Pressburg with Ladislaus, king of Bohemia, who had obtained the Hungarian throne. By this treaty it was agreed that Maximilian should succeed to the crown in case Ladislaus left no legitimate male issue. Having defeated the invading Turks at Villach in 1492, the king was eager to take revenge upon the king of France; but the states of the Netherlands would afford him no assistance. The German diet was indifferent, and in May 1493 he agreed to the peace of Senlis and regained Artois and Franche-Comté.
In August 1493 the death of the emperor left Maximilian sole ruler of Germany and head of the house of Habsburg; and on the 16th of March 1494 he married at Innsbruck Bianca Maria Sforza, daughter of Galeazzo Sforza, duke of Milan (d. 1476). At this time Bianca’s uncle, Ludovico Sforza, was invested with the duchy of Milan in return for the substantial dowry which his niece brought to the king. Maximilian harboured the idea of driving the Turks from Europe; but his appeal to all Christian sovereigns was ineffectual. In 1494 he was again in the Netherlands, where he led an expedition against the rebels of Gelderland, assisted Perkin Warbeck to make a descent upon England, and formally handed over the government of the Low Countries to Philip. His attention was next turned to Italy, and, alarmed at the progress of Charles VIII. in the peninsula, he signed the league of Venice in March 1495, and about the same time arranged a marriage between his son Philip and Joanna, daughter of Ferdinand and Isabella, king and queen of Castile and Aragon. The need for help to prosecute the war in Italy caused the king to call the diet to Worms in March 1495, when he urged the necessity of checking the progress of Charles. As during his father’s lifetime Maximilian had favoured the reforming party among the princes, proposals for the better government of the empire were brought forward at Worms as a necessary preliminary to financial and military support. Some reforms were adopted, the public peace was proclaimed without any limitation of time and a general tax was levied. The three succeeding years were mainly occupied with quarrels with the diet, with two invasions of France, and a war in Gelderland against Charles, count of Egmont, who claimed that duchy, and was supported by French troops. The reforms of 1495 were rendered abortive by the refusal of Maximilian to attend the diets or to take any part in the working of the new constitution, and in 1497 he strengthened his own authority by establishing an Aulic Council (Reichshofrath), which he declared was competent to deal with all business of the empire, and about the same time set up a court to centralize the financial administration of Germany.
In February 1499 the king became involved in a war with the Swiss, who had refused to pay the imperial taxes or to furnish a contribution for the Italian expedition. Aided by France they defeated the German troops, and the peace of Basel in September 1499 recognized them as virtually independent of the empire. About this time Maximilian’s ally, Ludovico of Milan, was taken prisoner by Louis XII., king of France, and Maximilian was again compelled to ask the diet for help. An elaborate scheme for raising an army was agreed to, and in return a council of regency (Reichsregiment) was established, which amounted, in the words of a Venetian envoy, to a deposition of the king. The relations were now very strained between the reforming princes and Maximilian, who, unable to raise an army, refused to attend the meetings of the council at Nuremberg, while both parties treated for peace with France. The hostility of the king rendered the council impotent. He was successful in winning the support of many of the younger princes, and in establishing a new court of justice, the members of which were named by himself. The negotiations with France ended in the treaty of Blois, signed in September 1504, when 923 Maximilian’s grandson Charles was betrothed to Claude, daughter of Louis XII., and Louis, invested with the duchy of Milan, agreed to aid the king of the Romans to secure the imperial crown. A succession difficulty in Bavaria-Landshut was only decided after Maximilian had taken up arms and narrowly escaped with his life at Regensburg. In the settlement of this question, made in 1505, he secured a considerable increase of territory, and when the king met the diet at Cologne in 1505 he was at the height of his power. His enemies at home were crushed, and their leader, Berthold, elector of Mainz, was dead; while the outlook abroad was more favourable than it had been since his accession.
It is at this period that Ranke believes Maximilian to have entertained the idea of a universal monarchy; but whatever hopes he may have had were shattered by the death of his son Philip and the rupture of the treaty of Blois. The diet of Cologne discussed the question of reform in a halting fashion, but afforded the king supplies for an expedition into Hungary, to aid his ally Ladislaus, and to uphold his own influence in the East. Having established his daughter Margaret as regent for Charles in the Netherlands, Maximilian met the diet at Constance in 1507, when the imperial chamber (Reichskammergericht) was revised and took a more permanent form, and help was granted for an expedition to Italy. The king set out for Rome to secure his coronation, but Venice refused to let him pass through her territories; and at Trant, on the 4th of February 1508, he took the important step of assuming the title of Roman Emperor Elect, to which he soon received the assent of pope Julius II. He attacked the Venetians, but finding the war unpopular with the trading cities of southern Germany, made a truce with the republic for three years. The treaty of Blois had contained a secret article providing for an attack on Venice, and this ripened into the league of Cambray, which was joined by the emperor in December 1509. He soon took the field, but after his failure to capture Padua the league broke up; and his sole ally, the French king, joined him in calling a general council at Pisa to discuss the question of Church reform. A breach with pope Julius followed, and at this time Maximilian appears to have entertained, perhaps quite seriously, the idea of seating himself in the chair of St Peter. After a period of vacillation he deserted Louis and joined the Holy League, which had been formed to expel the French from Italy; but unable to raise troops, he served with the English forces as a volunteer and shared in the victory gained over the French at the battle of the Spurs near Thérouanne on the 16th of August 1513. In 1500 the diet had divided Germany into six circles, for the maintenance of peace, to which the emperor at the diet of Cologne in 1512 added four others. Having made an alliance with Christian II., king of Denmark, and interfered to protect the Teutonic Order against Sigismund I., king of Poland, Maximilian was again in Italy early in 1516 fighting the French who had overrun Milan. His want of success compelled him on the 4th of December 1516 to sign the treaty of Brussels, which left Milan in the hands of the French king, while Verona was soon afterwards transferred to Venice. He attempted in vain to secure the election of his grandson Charles as king of the Romans, and in spite of increasing infirmity was eager to lead the imperial troops against the Turks. At the diet of Augsburg in 1518 the emperor heard warnings of the Reformation in the shape of complaints against papal exactions, and a repetition of the complaints preferred at the diet of Mainz in 1517 about the administration of Germany. Leaving the diet, he travelled to Wels in Upper Austria, where he died on the 12th of January 1519. He was buried in the church of St George in Vienna Neustadt, and a superb monument, which may still be seen, was raised to his memory at Innsbruck.
Maximilian had many excellent personal qualities. He was not handsome, but of a robust and well-proportioned frame. Simple in his habits, conciliatory in his bearing, and catholic in his tastes, he enjoyed great popularity and rarely made a personal enemy. He was a skilled knight and a daring huntsman, and although not a great general, was intrepid on the field of battle. His mental interests were extensive. He knew something of six languages, and could discuss art, music, literature or theology. He reorganized the university of Vienna and encouraged the development of the universities of Ingolstadt and Freiburg. He was the friend and patron of scholars, caused manuscripts to be copied and medieval poems to be collected. He was the author of military reforms, which included the establishment of standing troops, called Landsknechte, the improvement of artillery by making cannon portable, and some changes in the equipment of the cavalry. He was continually devising plans for the better government of Austria, and although they ended in failure, he established the unity of the Austrian dominions. Maximilian has been called the second founder of the house of Habsburg, and certainly by bringing about marriages between Charles and Joanna and between his grandson Ferdinand and Anna, daughter of Ladislaus, king of Hungary and Bohemia, he paved the way for the vast empire of Charles V. and for the influence of the Habsburgs in eastern Europe. But he had many qualities less desirable. He was reckless and unstable, resorting often to lying and deceit, and never pausing to count the cost of an enterprise or troubling to adapt means to ends. For absurd and impracticable schemes in Italy and elsewhere he neglected Germany, and sought to involve its princes in wars undertaken solely for private aggrandizement or personal jealousy. Ignoring his responsibilities as ruler of Germany, he only considered the question of its government when in need of money and support from the princes. As the “last of the knights” he could not see that the old order of society was passing away and a new order arising, while he was fascinated by the glitter of the medieval empire and spent the better part of his life in vague schemes for its revival. As “a gifted amateur in politics” he increased the disorder of Germany and Italy and exposed himself and the empire to the jeers of Europe.
Maximilian was also a writer of books, and his writings display his inordinate vanity. His Geheimes Jagdbuch, containing about 2500 words, is a treatise purporting to teach his grandsons the art of hunting. He inspired the production of The Dangers and Adventures of the Famous Hero and Knight Sir Teuerdank, an allegorical poem describing his adventures on his journey to marry Mary of Burgundy. The emperor’s share in the work is not clear, but it seems certain that the general scheme and many of the incidents are due to him. It was first published at Nuremberg by Melchior Pfintzing in 1517, and was adorned with woodcuts by Hans Leonhard Schäufelein. The Weisskunig was long regarded as the work of the emperor’s secretary, Marx Treitzsaurwein, but it is now believed that the greater part of the book at least is the work of the emperor himself. It is an unfinished autobiography containing an account of the achievements of Maximilian, who is called “the young white king.” It was first published at Vienna in 1775. He also is responsible for Freydal, an allegorical account of the tournaments in which he took part during his wooing of Mary of Burgundy; Ehrenpforten, Triumphwagen and Der weisen könige Stammbaum, books concerning his own history and that of the house of Habsburg, and works on various subjects, as Das Stahlbuch, Die Baumeisterei and Die Gärtnerei. These works are all profusely illustrated, some by Albrecht Dürer, and in the preparation of the woodcuts Maximilian himself took the liveliest interest. A facsimile of the original editions of Maximilian’s autobiographical and semi-autobiographical works has been published in nine volumes in the Jahrbücher der kunsthistorischen Sammlungen des Kaiserhauses (Vienna, 1880-1888). For this edition S. Laschitzer wrote an introduction to Sir Teuerdank, Q. von Leitner to Freydal, and N. A. von Schultz to Der Weisskunig. The Holbein society issued a facsimile of Sir Teuerdank (London, 1884) and Triumphwagen (London, 1883).
See Correspondance de l’empereur Maximilien I. et de Marguerite d’Autriche, 1507-1519, edited by A. G. le Glay (Paris, 1839); Maximilians I. vertraulicher Briefwechsel mit Sigmund Prüschenk, edited by V. von Kraus (Innsbruck, 1875); J. Chmel, Urkunden, Briefe und Aktenstücke zur Geschichte Maximilians I. und seiner Zeit. (Stuttgart, 1845) and Aktenstücke und Briefe zur Geschichte des Hauses Habsburg im Zeitalter Maximilians I. (Vienna, 1854-1858); K. Klüpfel, Kaiser Maximilian I. (Berlin, 1864); H. Ulmann, Kaiser Maximilian I. (Stuttgart, 1884); L. P. Gachard, Lettres inédites de Maximilien I. sur les affaires des Pays Bas (Brussels, 1851-1852); L. von Ranke, Geschichte der romanischen und germanischen Völker, 1494-1514 (Leipzig, 1874); R. W. S. Watson, Maximilian I. (London, 1902); A. Jäger, Über Kaiser Maximilians I. Verhältnis zum Papstthum (Vienna, 1854); H. Ulmann, Kaiser Maximilians I. Absichten auf das Papstthum (Stuttgart, 1888), and A. Schulte, Kaiser Maximilian I. als Kandidat für den päpstlichen Stuhl (Leipzig, 1906).
MAXIMILIAN II. (1527-1576), Roman emperor, was the eldest son of the emperor Ferdinand I. by his wife Anne, daughter of Ladislaus, king of Hungary and Bohemia, and was born in Vienna on the 31st of July 1527. Educated principally in Spain, he gained some experience of warfare during the campaign of Charles V. against France in 1544, and also during the war of the league of Schmalkalden, and soon began to take part in imperial business. Having in September 1548 married his 924 cousin Maria, daughter of Charles V., he acted as the emperor’s representative in Spain from 1548 to 1550, returning to Germany in December 1550 in order to take part in the discussion over the imperial succession. Charles V. wished his son Philip (afterwards king of Spain) to succeed him as emperor, but his brother Ferdinand, who had already been designated as the next occupant of the imperial throne, and Maximilian objected to this proposal. At length a compromise was reached. Philip was to succeed Ferdinand, but during the former’s reign Maximilian, as king of the Romans, was to govern Germany. This arrangement was not carried out, and is only important because the insistence of the emperor seriously disturbed the harmonious relations which had hitherto existed between the two branches of the Habsburg family; and the estrangement went so far that an illness which befell Maximilian in 1552 was attributed to poison given to him in the interests of his cousin and brother-in-law, Philip of Spain. About this time he took up his residence in Vienna, and was engaged mainly in the government of the Austrian dominions and in defending them against the Turks. The religious views of the king of Bohemia, as Maximilian had been called since his recognition as the future ruler of that country in 1549, had always been somewhat uncertain, and he had probably learned something of Lutheranism in his youth; but his amicable relations with several Protestant princes, which began about the time of the discussion over the succession, were probably due more to political than to religious considerations. However, in Vienna he became very intimate with Sebastian Pfauser (1520-1569), a court preacher with strong leanings towards Lutheranism, and his religious attitude caused some uneasiness to his father. Fears were freely expressed that he would definitely leave the Catholic Church, and when Ferdinand became emperor in 1558 he was prepared to assure Pope Paul IV. that his son should not succeed him if he took this step. Eventually Maximilian remained nominally an adherent of the older faith, although his views were tinged with Lutheranism until the end of his life. After several refusals he consented in 1560 to the banishment of Pfauser, and began again to attend the services of the Catholic Church. This uneasiness having been dispelled, in November 1562 Maximilian was chosen king of the Romans, or German king, at Frankfort, where he was crowned a few days later, after assuring the Catholic electors of his fidelity to their faith, and promising the Protestant electors that he would publicly accept the confession of Augsburg when he became emperor. He also took the usual oath to protect the Church, and his election was afterwards confirmed by the papacy. In September 1563 he was crowned king of Hungary, and on his father’s death, in July 1564, succeeded to the empire and to the kingdoms of Hungary and Bohemia.
The new emperor had already shown that he believed in the necessity for a thorough reform of the Church. He was unable, however, to obtain the consent of Pope Pius IV. to the marriage of the clergy, and in 1568 the concession of communion in both kinds to the laity was withdrawn. On his part Maximilian granted religious liberty to the Lutheran nobles and knights in Austria, and refused to allow the publication of the decrees of the council of Trent. Amid general expectations on the part of the Protestants he met his first Diet at Augsburg in March 1566. He refused to accede to the demands of the Lutheran princes; on the other hand, although the increase of sectarianism was discussed, no decisive steps were taken to suppress it, and the only result of the meeting was a grant of assistance for the Turkish War, which had just been renewed. Collecting a large and splendid army Maximilian marched to defend his territories; but no decisive engagement had taken place when a truce was made in 1568, and the emperor continued to pay tribute to the sultan for Hungary. Meanwhile the relations between Maximilian and Philip of Spain had improved; and the emperor’s increasingly cautious and moderate attitude in religious matters was doubtless due to the fact that the death of Philip’s son, Don Carlos, had opened the way for the succession of Maximilian, or of one of his sons, to the Spanish throne. Evidence of this friendly feeling was given in 1570, when the emperor’s daughter, Anne, became the fourth wife of Philip; but Maximilian was unable to moderate the harsh proceedings of the Spanish king against the revolting inhabitants of the Netherlands. In 1570 the emperor met the diet at Spires and asked for aid to place his eastern borders in a state of defence, and also for power to repress the disorder caused by troops in the service of foreign powers passing through Germany. He proposed that his consent should be necessary before any soldiers for foreign service were recruited in the empire; but the estates were unwilling to strengthen the imperial authority, the Protestant princes regarded the suggestion as an attempt to prevent them from assisting their coreligionists in France and the Netherlands, and nothing was done in this direction, although some assistance was voted for the defence of Austria. The religious demands of the Protestants were still unsatisfied, while the policy of toleration had failed to give peace to Austria. Maximilian’s power was very limited; it was inability rather than unwillingness that prevented him from yielding to the entreaties of Pope Pius V. to join in an attack on the Turks both before and after the victory of Lepanto in 1571; and he remained inert while the authority of the empire in north-eastern Europe was threatened. His last important act was to make a bid for the throne of Poland, either for himself or for his son Ernest. In December 1575 he was elected by a powerful faction, but the diet which met at Regensburg was loath to assist; and on the 12th of October 1576 the emperor died, refusing on his deathbed to receive the last sacraments of the Church.
By his wife Maria he had a family of nine sons and six daughters. He was succeeded by his eldest surviving son, Rudolph, who had been chosen king of the Romans in October 1575. Another of his sons, Matthias, also became emperor; three others, Ernest, Albert and Maximilian, took some part in the government of the Habsburg territories or of the Netherlands, and a daughter, Elizabeth, married Charles IX. king of France.
The religious attitude of Maximilian has given rise to much discussion, and on this subject the writings of W. Maurenbrecher, W. Goetz and E. Reimann in the Historische Zeitschrift, Bände VII., XV., XXXII. and LXXVII. (Munich, 1870 fol.) should be consulted, and also O. H. Hopfen, Maximilian II. und der Kompromisskatholizismus (Munich, 1895); C. Haupt, Melanchthons und seiner Lehrer Einfluss auf Maximilian II. (Wittenberg, 1897); F. Walter, Die Wahl Maximilians II. (Heidelberg, 1892); W. Goetz, Maximilians II. Wahl zum römischen Könige (Würzburg, 1891), and T. J. Scherg, Über die religiöse Entwickelung Kaiser Maximilians II. bis zu seiner Wahl zum römischen Könige (Würzburg, 1903). For a more general account of his life and work see Briefe und Akten zur Geschichte Maximilians II., edited by W. E. Schwarz (Paderborn, 1889-1891); M. Koch, Quellen zur Geschichte des Kaisers Maximilian II. in Archiven gesammelt (Leipzig, 1857-1861); R. Holtzmann, Kaiser Maximilian II. bis zu seiner Thronbesteigung (Berlin, 1903); E. Wertheimer, Zur Geschichte der Türkenkriege Maximilians II. (Vienna, 1875); L. von Ranke, Über die Zeiten Ferdinands I. und Maximilians II. in Band VII. of his Sämmtliche Werke (Leipzig, 1874), and J. Janssen, Geschichte des deutschen Volkes seit dem Ausgang des Mittelalters, Bände IV. to VIII. (Freiburg, 1885-1894), English translation by M. A. Mitchell and A. M. Christie (London, 1896 fol.).
MAXIMILIAN (1832-1867), emperor of Mexico, second son of the archduke Francis Charles of Austria, was born in the palace of Schönbrunn, on the 6th of July 1832. He was a particularly clever boy, showed considerable taste for the arts, and early displayed an interest in science, especially botany. He was trained for the navy, and threw himself into this career with so much zeal that he quickly rose to high command, and was mainly instrumental in creating the naval port of Trieste and the fleet with which Tegethoff won his victories in the Italian War. He had some reputation as a Liberal, and this led, in February 1857, to his appointment as viceroy of the Lombardo-Venetian kingdom; in the same year he married the Princess Charlotte, daughter of Leopold I., king of the Belgians. On the outbreak of the war of 1859 he retired into private life, chiefly at Trieste, near which he built the beautiful chateau of Miramar. In this same year he was first approached by Mexican exiles with the proposal to become the candidate 925 for the throne of Mexico. He did not at first accept, but sought to satisfy his restless desire for adventure by a botanical expedition to the tropical forests of Brazil. In 1863, however, under pressure from Napoleon III., and after General Forey’s capture of the city of Mexico and the plebiscite which confirmed his proclamation of the empire, he consented to accept the crown. This decision was contrary to the advice of his brother, the emperor Francis Joseph, and involved the loss of all his rights in Austria. Maximilian landed at Vera Cruz on the 28th of May 1864; but from the very outset he found himself involved in difficulties of the most serious kind, which in 1866 made apparent to almost every one outside of Mexico the necessity for his abdicating. Though urged to this course by Napoleon himself, whose withdrawal from Mexico was the final blow to his cause, Maximilian refused to desert his followers. Withdrawing, in February 1867, to Querétaro, he there sustained a siege for several weeks, but on the 15th of May resolved to attempt an escape through the enemy’s lines. He was, however, arrested before he could carry out this resolution, and after trial by court-martial was condemned to death. The sentence was carried out on the 19th of June 1867. His remains were conveyed to Vienna, where they were buried in the imperial vault early in the following year. (See Mexico.)
Maximilian’s papers were published at Leipzig in 1867, in seven volumes, under the title Aus meinem Leben, Reiseskizzen, Aphorismen, Gedichte. See Pierre de la Gorce, Hist. du Second Empire, IV., liv. xxv. ii. (Paris, 1904); article by von Hoffinger in Allgemeine Deutsche Biographie, xxi. 70, where authorities are cited.
MAXIMINUS, GAIUS JULIUS VERUS, Roman emperor from A.D. 235 to 238, was born in a village on the confines of Thrace. He was of barbarian parentage and was brought up as a shepherd. His immense stature and enormous feats of strength attracted the attention of the emperor Septimius Severus. He entered the army, and under Caracalla rose to the rank of centurion. He carefully absented himself from court during the reign of Heliogabalus, but under his successor Alexander Severus, was appointed supreme commander of the Roman armies. After the murder of Alexander in Gaul, hastened, it is said, by his instigation, Maximinus was proclaimed emperor by the soldiers on the 19th of March 235. The three years of his reign, which were spent wholly in the camp, were marked by great cruelty and oppression; the widespread discontent thus produced culminated in a revolt in Africa and the assumption of the purple by Gordian (q.v.). Maximinus, who was in Pannonia at the time, marched against Rome, and passing over the Julian Alps descended on Aquileia; while detained before that city he and his son were murdered in their tent by a body of praetorians. Their heads were cut off and despatched to Rome, where they were burnt on the Campus Martius by the exultant crowd.
Capitolinus, Maximini duo; Herodian vi. 8, vii., viii. 1-5; Zosimus i. 13-15.
MAXIMINUS [Maximin], GALERIUS VALERIUS, Roman emperor from A.D. 308 to 314, was originally an Illyrian shepherd named Daia. He rose to high distinction after he had joined the army, and in 305 he was raised by his uncle, Galerius, to the rank of Caesar, with the government of Syria and Egypt. In 308, after the elevation of Licinius, he insisted on receiving the title of Augustus; on the death of Galerius, in 311, he succeeded to the supreme command of the provinces of Asia, and when Licinius and Constantine began to make common cause with one another Maximinus entered into a secret alliance with Maxentius. He came to an open rupture with Licinius in 313, sustained a crushing defeat in the neighbourhood of Heraclea Pontica on the 30th of April, and fled, first to Nicomedia and afterwards to Tarsus, where he died in August following. His death was variously ascribed “to despair, to poison, and to the divine justice.” Maximinus has a bad name in Christian annals, as having renewed persecution after the publication of the toleration edict of Galerius, but it is probable that he has been judged too harshly.
See Maxentius; Zosimus ii. 8; Aurelius Victor, Epit. 40.
MAXIMS, LEGAL. A maxim is an established principle or proposition. The Latin term maxima is not to be found in Roman law with any meaning exactly analogous to that of a legal maxim in the modern sense of the word, but the treatises of many of the Roman jurists on Regulae definitiones, and Sententiae juris are, in some measure, collections of maxims (see an article on “Latin Maxims in English Law” in Law Mag. and Rev. xx. 285); Fortescue (De laudibus, c. 8) and Du Cange treat maxima and regula as identical. The attitude of early English commentators towards the maxims of the law was one of unmingled adulation. In Doctor and Student (p. 26) they are described as “of the same strength and effect in the law as statutes be.” Coke (Co. Litt. 11 A) says that a maxim is so called “Quia maxima est ejus dignitas et certissima auctoritas, atque quod maxime omnibus probetur.” “Not only,” observes Bacon in the Preface to his Collection of Maxims, “will the use of maxims be in deciding doubt and helping soundness of judgment, but, further, in gracing argument, in correcting unprofitable subtlety, and reducing the same to a more sound and substantial sense of law, in reclaiming vulgar errors, and, generally, in the amendment in some measure of the very nature and complexion of the whole law.” A similar note was sounded in Scotland; and it has been well observed that “a glance at the pages of Morrison’s Dictionary or at other early reports will show how frequently in the older Scots law questions respecting the rights, remedies and liabilities of individuals were determined by an immediate reference to legal maxims” (J. M. Irving, Encyclo. Scots Law, s.v. “Maxims”). In later times less value has been attached to the maxims of the law, as the development of civilization and the increasing complexity of business relations have shown the necessity of qualifying the propositions which they enunciate (see Stephen, Hist. Crim. Law, ii. 94 n: Yarmouth v. France, 1887, 19 Q.B.D., per Lord Esher, at p. 653, and American authorities collected in Bouvier’s Law Dict. s.v. “Maxim”). But both historically and practically they must always possess interest and value.
A brief reference need only be made here, with examples by way of illustration, to the field which the maxims of the law cover.
Commencing with rules founded on public policy, we may note the famous principle—Salus populi suprema lex (xii. Tables: Bacon, Maxims, reg. 12)—“the public welfare is the highest law.” It is on this maxim that the coercive action of the State towards individual liberty in a hundred matters is based. To the same category belong the maxims—Summa ratio est quae pro religione facit (Co. Litt. 341 a)—“the best rule is that which advances religion”—a maxim which finds its application when the enforcement of foreign laws or judgments supposed to violate our own laws or the principles of natural justice is in question; and Dies dominicus non est juridicus, which exempts Sunday from the lawful days for juridical acts. Among the maxims relating to the crown, the most important are Rex non potest peccare (2 Rolle R. 304)—“The King can do no wrong”—which enshrines the principle of ministerial responsibility, and Nullum tempus occurrit regi (2 Co. Inst. 273)—“lapse of time does not bar the crown,” a maxim qualified by various enactments in modern times. Passing to the judicial office and the administration of justice, we may refer to the rules—Audi alteram partem—a proposition too familiar to need either translation or comment; Nemo debet esse judex in propriâ suâ causâ (12 Co. Rep. 114)—“no man ought to be judge in his own cause”—a maxim which French law, and the legal systems based upon or allied to it, have embodied in an elaborate network of rules for judicial challenge; and the maxim which defines the relative functions of judge and jury, Ad quaestionem facti non respondent judices, ad quaestionem legis non respondent juratores (8 Co. Rep. 155). The maxim Boni judicis est ampliare jurisdictionem (Ch. Prec. 329) is certainly erroneous as it stands, as a judge has no right to “extend his jurisdiction.” If justitiam is substituted for jurisdictionem, as Lord Mansfield said it should be (1 Burr. 304), the maxim is near the truth. A group of maxims supposed to embody certain fundamental principles of legal right and obligations may next be referred to: (a) Ubi jus ibi remedium (see Co. Litt. 197 b)—a maxim to which the evolution of the flexible “action on the case,” by which wrongs unknown to the “original writs” were dealt with, was historically due, but which must be taken with the gloss Damnum absque injuria—“there are forms of actual damage which do not constitute legal injury” for which the law supplies no remedy; (b) Actus Dei nemini facit injuriam (2 Blackstone, 122)—and its allied maxim, Lex non cogit ad impossibilia (Co. Litt. 231 b)—on which the whole doctrine of vis major (force majeure) and impossible conditions in the law of contract has been 926 built up. In this category may also be classed Volenti non fit injuria (Wingate, Maxims), out of which sprang the theory—now profoundly modified by statute—of “common employment” in the law of employers’ liability; see Smith v. Baker, 1891, A.C. 325. Other maxims deal with rights of property—Qui prior est tempore, potior est jure (Co. Litt. 14 a), which consecrates the position of the beati possidentes alike in municipal and in international law; Sic utere tuo ut alienum non laedas (9 Co. Rep. 59), which has played its part in the determination of the rights of adjacent owners; and Domus sua cuique est tutissimum refugium (5 Co. Rep. 92)—“a man’s house is his castle,” a doctrine which has imposed limitations on the rights of execution creditors (see Execution). In the laws of family relations there are the maxims Consensus non concubitus facit matrimonium (Co. Litt. 33 a)—the canon law of Europe prior to the council of Trent, and still law in Scotland, though modified by legislation in England; and Pater is est quem nuptiae demonstrant (see Co. Litt. 7 b), on which, in most civilized countries, the presumption of legitimacy depends. In the interpretation of written instruments, the maxim Noscitur a sociis (3 Term Reports, 87), which proclaims the importance of the context, still applies. So do the rules Expressio unius est exclusio alterius (Co. Litt. 210 a), and Contemporanea expositio est optima et fortissima in lege (2 Co. Inst. 11), which lets in evidence of contemporaneous user as an aid to the interpretation of statutes or documents; see Van Diemen’s Land Co. v. Table Cape Marine Board, 1906, A.C. 92, 98. We may conclude this sketch with a miscellaneous summary: Caveat emptor (Hob. 99)—“let the purchaser beware”; Qui facit per alium facile per se, which affirms the principal’s liability for the acts of his agent; Ignorantia juris neminem excusat, on which rests the ordinary citizen’s obligation to know the law; and Vigilantibus non dormientibus jura subveniunt (2 Co. Inst. 690), one of the maxims in accordance with which courts of equity administer relief. Among other “maxims of equity” come the rules that “he that seeks equity must do equity,” i.e. must act fairly, and that “equity looks upon that as done which ought to be done”—a principle from which the “conversion” into money of land directed to be sold, and of money directed to be invested in the purchase of land, is derived.
The principal collections of legal maxims are: English Law: Bacon, Collection of Some Principal Rules and Maxims of the Common Law (1630); Noy, Treatise of the principal Grounds and Maxims of the Law of England (1641, 8th ed., 1824); Wingate, Maxims of Reason (1728); Francis, Grounds and Rudiments of Law and Equity (2nd ed. 1751); Lofft (annexed to his Reports, 1776); Broom, Legal Maxims (7th ed. London, 1900). Scots Law: Lord Trayner, Latin Maxims and Phrases (2nd ed., 1876); Stair, Institutions of the Law of Scotland, with Index by More (Edinburgh, 1832). American Treatises: A. I. Morgan, English Version of Legal Maxims (Cincinnati, 1878); S. S. Peloubet, Legal Maxims in Law and Equity (New York, 1880).
MAXIMUS, the name of four Roman emperors.
I. M. Clodius Pupienus Maximus, joint emperor with D. Caelius Calvinus Balbinus during a few months of the year A.D. 238. Pupienus was a distinguished soldier, who had been proconsul of Bithynia, Achaea, and Gallia Narbonensis. At the advanced age of seventy-four, he was chosen by the senate with Balbinus to resist the barbarian Maximinus. Their complete equality is shown by the fact that each assumed the titles of pontifex maximus and princeps senatus. It was arranged that Pupienus should take the field against Maximinus, while Balbinus remained at Rome to maintain order, a task in which he signally failed. A revolt of the praetorians was not repressed till much blood had been shed and a considerable part of the city reduced to ashes. On his march, Pupienus, having received the news that Maximinus had been assassinated by his own troops, returned in triumph to Rome. Shortly afterwards, when both emperors were on the point of leaving the city on an expedition—Pupienus against the Persians and Balbinus against the Goths—the praetorians, who had always resented the appointment of the senatorial emperors and cherished the memory of the soldier-emperor Maximinus, seized the opportunity of revenge. When most of the people were at the Capitoline games, they forced their way into the palace, dragged Balbinus and Pupienus through the streets, and put them to death.
See Capitolinus, Life of Maximus and Balbinus; Herodian vii. 10, viii. 6; Zonaras xii. 16; Orosius vii. 19; Eutropius ix. 2; Zosimus i. 14; Aurelius Victor, Caesares, 26, epit. 26; H. Schiller, Geschichte der römischen Kaiserzeit, i. 2; Gibbon, Decline and Fall, ch. 7 and (for the chronology) appendix 12 (Bury’s edition).
II. Magnus Maximus, a native of Spain, who had accompanied Theodosius on several expeditions and from 368 held high military rank in Britain. The disaffected troops having proclaimed Maximus emperor, he crossed over to Gaul, attacked Gratian (q.v.), and drove him from Paris to Lyons, where he was murdered by a partisan of Maximus. Theodosius being unable to avenge the death of his colleague, an agreement was made (384 or 385) by which Maximus was recognized as Augustus and sole emperor in Gaul, Spain and Britain, while Valentinian II. was to remain unmolested in Italy and Illyricum, Theodosius retaining his sovereignty in the East. In 387 Maximus crossed the Alps, Valentinian was speedily put to flight, while the invader established himself in Milan and for the time became master of Italy. Theodosius now took vigorous measures. Advancing with a powerful army, he twice defeated the troops of Maximus—at Siscia on the Save, and at Poetovio on the Danube. He then hurried on to Aquileia, where Maximus had shut himself up, and had him beheaded. Under the name of Maxen Wledig, Maximus appears in the list of Welsh royal heroes (see R. Williams, Biog. Dict. of Eminent Welshmen, 1852; “The Dream of Maxen Wledig,” in the Mabinogion).
Full account with classical references in H. Richter, Das weströmische Reich, besonders unter den Kaisern Gratian, Valentinian II. und Maximus (1865); see also H. Schiller, Geschichte der römischen Kaiserzeit, ii. (1887); Gibbon, Decline and Fall, ch. 27; Tillemont, Hist. des empereurs, v.
III. Maximus Tyrannus, made emperor in Spain by the Roman general, Gerontius, who had rebelled against the usurper Constantine in 408. After the defeat of Gerontius at Arelate (Arles) and his death in 411 Maximus renounced the imperial title and was permitted by Constantine to retire into private life. About 418 he rebelled again, but, failing in his attempt, was seized, carried into Italy, and put to death at Ravenna in 422.
See Orosius vii. 42; Zosimus vi. 5; Sozomen ix. 3; E. A. Freeman, “The Tyrants of Britain, Gaul and Spain, A.D. 406-411,” in English Historical Review, i. (1886).
IV. Petronius Maximus, a member of the higher Roman nobility, had held several court and public offices, including those of praefectus Romae (420) and Italiae (439-441 and 445), and consul (433, 443). He was one of the intimate associates of Valentinian III., whom he assisted in the palace intrigues which led to the death of Aëtius in 454; but an outrage committed on the wife of Maximus by the emperor turned his friendship into hatred. Maximus was proclaimed emperor immediately after Valentinian’s murder (March 16, 455), but after reigning less than three months, he was murdered by some Burgundian mercenaries as he was fleeing before the troops of Genseric, who, invited by Eudoxia, the widow of Valentinian, had landed at the mouth of the Tiber (May or June 455).
See Procopius, Vand. i. 4; Sidonius Apollinaris, Panegyr. Aviti, ep. ii. 13; the various Chronicles; Gibbon, Decline and Fall, chs. 35, 36; Tillemont, Hist. des empereurs, vi.
MAXIMUS, ST (c. 580-662), abbot of Chrysopolis, known as “the Confessor” from his orthodox zeal in the Monothelite (q.v.) controversy, or as “the monk,” was born of noble parentage at Constantinople about the year 580. Educated with great care, he early became distinguished by his talents and acquirements, and some time after the accession of the emperor Heraclius in 610 was made his private secretary. In 630 he abandoned the secular life and entered the monastery of Chrysopolis (Scutari), actuated, it was believed, less by any longing for the life of a recluse than by the dissatisfaction he felt with the Monothelite leanings of his master. The date of his promotion to the abbacy is uncertain. In 633 he was one of the party of Sophronius of Jerusalem (the chief original opponent of the Monothelites) at the council of Alexandria; and in 645 he was again in Africa, when he held in presence of the governor and a number of bishops the disputation with Pyrrhus, the deposed and banished patriarch of Constantinople, which resulted in the (temporary) conversion of his interlocutor to the Dyothelite view. In the following year several African synods, held under the influence of Maximus, declared for orthodoxy. In 649, after the accession of Martin I., he went to Rome, and did much to fan the zeal of the new pope, who in 927 October of that year held the (first) Lateran synod, by which not only the Monothelite doctrine but also the moderating ecthesis of Heraclius and typus of Constans II. were anathematized. About 653 Maximus, for the part he had taken against the latter document especially, was apprehended (together with the pope) by order of Constans and carried a prisoner to Constantinople. In 655, after repeated examinations, in which he maintained his theological opinions with memorable constancy, he was banished to Byzia in Thrace, and afterwards to Perberis. In 662 he was again brought to Constantinople and was condemned by a synod to be scourged, to have his tongue cut out by the root, and to have his right hand chopped off. After this sentence had been carried out he was again banished to Lazica, where he died on the 13th of August 662. He is venerated as a saint both in the Greek and in the Latin Churches. Maximus was not only a leader in the Monothelite struggle but a mystic who zealously followed and advocated the system of Pseudo-Dionysius, while adding to it an ethical element in the conception of the freedom of the will. His works had considerable influence in shaping the system of John Scotus Erigena.
The most important of the works of Maximus will be found in Migne, Patrologia graeca, xc. xci., together with an anonymous life; an exhaustive list in Wagenmann’s article in vol. xii. (1903) of Hauck-Herzog’s Realencyklopädie where the following classification is adopted: (a) exegetical, (b) scholia on the Fathers, (c) dogmatic and controversial, (d) ethical and ascetic, (e) miscellaneous. The details of the disputation with Pyrrhus and of the martyrdom are given very fully and clearly in Hefele’s Conciliengeschichte, iii. For further literature see H. Gelzer in C. Krumbacher’s Geschichte der byzantinischen Litteratur (1897).
MAXIMUS OF SMYRNA, a Greek philosopher of the Neo-platonist school, who lived towards the end of the 4th century A.D. He was perhaps the most important of the followers of Iamblichus. He is said to have been of a rich and noble family, and exercised great influence over the emperor Julian, who was commended to him by Aedesius. He pandered to the emperor’s love of magic and theurgy, and by judicious administration of the omens won a high position at court. His overbearing manner made him numerous enemies, and, after being imprisoned on the death of Julian, he was put to death by Valens. He is a representative of the least attractive side of Neoplatonism. Attaching no value to logical proof and argument, he enlarged on the wonders and mysteries of nature, and maintained his position by the working of miracles. In logic he is reported to have agreed with Eusebius, Iamblichus and Porphyry in asserting the validity of the second and third figures of the syllogism.
MAXIMUS OF TYRE (Cassius Maximus Tyrius), a Greek rhetorician and philosopher who flourished in the time of the Antonines and Commodus (2nd century A.D.). After the manner of the sophists of his age, he travelled extensively, delivering lectures on the way. His writings contain many allusions to the history of Greece, while there is little reference to Rome; hence it is inferred that he lived longer in Greece, perhaps as a professor at Athens. Although nominally a Platonist, he is really an Eclectic and one of the precursors of Neoplatonism. There are still extant by him forty-one essays or discourses (διαλέξεις) on theological, ethical, and other philosophical commonplaces. With him God is the supreme being, one and indivisible though called by many names, accessible to reason alone; but as animals form the intermediate stage between plants and human beings, so there exist intermediaries between God and man, viz. daemons, who dwell on the confines of heaven and earth. The soul in many ways bears a great resemblance to the divinity; it is partly mortal, partly immortal, and, when freed from the fetters of the body, becomes a daemon. Life is the sleep of the soul, from which it awakes at death. The style of Maximus is superior to that of the ordinary sophistical rhetorician, but scholars differ widely as to the merits of the essays themselves.
Maximus of Tyre must be distinguished from the Stoic Maximus, tutor of Marcus Aurelius.
Editions by J. Davies, revised with valuable notes by J. Markland (1740); J. J. Reiske (1774); F. Dübner (1840, with Theophrastus, &c., in the Didot series). Monographs by R. Rohdich (Beuthen, 1879); H. Hobein, De Maximo Tyrio quaestiones philol. (Jena, 1895). There is an English translation (1804) by Thomas Taylor, the Platonist.
MAX MÜLLER, FRIEDRICH (1823-1900), Anglo-German orientalist and comparative philologist, was born at Dessau on the 6th of December 1823, being the son of Wilhelm Müller (1794-1827), the German poet, celebrated for his phil-Hellenic lyrics, who was ducal librarian at Dessau. The elder Müller had endeared himself to the most intellectual circles in Germany by his amiable character and his genuine poetic gift; his songs had been utilized by musical composers, notably Schubert; and it was his son’s good fortune to meet in his youth with a succession of eminent friends, who, already interested in him for his father’s sake, and charmed by the qualities which they discovered in the young man himself, powerfully aided him by advice and patronage. Mendelssohn, who was his godfather, dissuaded him from indulging his natural bent to the study of music; Professor Brockhaus of the University of Leipzig, where Max Müller matriculated in 1841, induced him to take up Sanskrit; Bopp, at the University of Berlin (1844), made the Sanskrit student a scientific comparative philologist; Schelling at the same university, inspired him with a love for metaphysical speculation, though failing to attract him to his own philosophy; Burnouf, at Paris in the following year, by teaching him Zend, started him on the track of inquiry into the science of comparative religion, and impelled him to edit the Rig Veda; and when, in 1846, Max Müller came to England upon this errand, Bunsen, in conjunction with Professor H. H. Wilson, prevailed upon the East India Company to undertake the expense of publication. Up to this time Max Müller had lived the life of a poor student, supporting himself partly by copying manuscripts, but Bunsen’s introductions to Queen Victoria and the prince consort, and to Oxford University, laid the foundation for him of fame and fortune. In 1848 the printing of his Rig Veda at the University Press obliged him to settle in Oxford, a step which decided his future career. He arrived at a favourable conjuncture: the Tractarian strife, which had so long thrust learning into the background, was just over, and Oxford was becoming accessible to modern ideas. The young German excited curiosity and interest, and it was soon discovered that, although a genuine scholar, he was no mere bookworm. Part of his social success was due to his readiness to exert his musical talents at private parties. Max Müller was speedily subjugated by the genius loci. He was appointed deputy Taylorian professor of modern languages in 1850, and the German government failed to tempt him back to Strassburg. In the following year he was made M.A. and honorary fellow of Christ Church, and in 1858 he was elected a fellow of All Souls. In 1854 the Crimean War gave him the opportunity of utilizing his oriental learning in vocabularies and schemes of transliteration. In 1857 he successfully essayed another kind of literature in his beautiful story Deutsche Liebe, written both in German and English. He had by this time become an extensive contributor to English periodical literature, and had written several of the essays subsequently collected as Chips from a German Workshop. The most important of them was the fascinating essay on “Comparative Mythology” in the Oxford Essays for 1856. His valuable History of Ancient Sanskrit Literature, so far as it illustrates the primitive religion of the Brahmans (and hence the Vedic period only), was published in 1850.
Though Max Müller’s reputation was that of a comparative philologist and orientalist, his professional duties at Oxford were long confined to lecturing on modern languages, or at least their medieval forms. In 1860 the death of Horace Hayman Wilson, professor of Sanskrit, seemed to open a more congenial sphere to him. His claims to the succession seemed incontestable, for his opponent, Monier Williams, though well qualified as a Sanskritist, lacked Max Müller’s brilliant versatility, and although educated at Oxford, had held no University 928 office. But Max Müller was a Liberal, and the friend of Liberals in university matters, in politics, and in theology, and this consideration united with his foreign birth to bring the country clergy in such hosts to the poll that the voice of resident Oxford was overborne, and Monier Williams was elected by a large majority. It was the one great disappointment of Max Müller’s life, and made a lasting impression upon him. It was, nevertheless, serviceable to his influence and reputation by permitting him to enter upon a wider field of subjects than would have been possible otherwise. Directly, Sanskrit philology received little more from him, except in connexion with his later undertaking of The Sacred Books of the East; but indirectly he exalted it more than any predecessor by proclaiming its commanding position in the history of the human intellect by his Science of Language, two courses of lectures delivered at the Royal Institution in 1861 and 1863. Max Müller ought not to be described as “the introducer of comparative philology into England.” Prichard had proved the Aryan affinities of the Celtic languages by the methods of comparative philology so long before as 1831; Winning’s Manual of Comparative Philology had been published in 1838; the discoveries of Bopp and Pott and Pictet had been recognized in brilliant articles in the Quarterly Review, and had guided the researches of Rawlinson. But Max Müller undoubtedly did far more to popularize the subject than had been done, or could have been done, by any predecessor. He was on less sure ground in another department of the study of language—the problem of its origin. He wrote upon it as a disciple of Kant, whose Critique of Pure Reason he translated. His essays on mythology are among the most delightful of his writings, but their value is somewhat impaired by a too uncompromising adherence to the seductive generalization of the solar myth.
Max Müller’s studies in mythology led him to another field of activity in which his influence was more durable and extensive, that of the comparative science of religions. Here, so far as Great Britain is concerned, he does deserve the fame of an originator, and his Introduction to the Science of Religion (1873: the same year in which he lectured on the subject, at Dean Stanley’s invitation, in Westminster Abbey, this being the only occasion on which a layman had given an address there) marks an epoch. It was followed by other works of importance, especially the four volumes of Gifford lectures, delivered between 1888 and 1892; but the most tangible result of the impulse he had given was the publication under his editorship, from 1875 onwards, of The Sacred Books of the East, in fifty-one volumes, including indexes, all but three of which appeared under his superintendence during his lifetime. These comprise translations by the most competent scholars of all the really important non-Christian scriptures of Oriental nations, which can now be appreciated without a knowledge of the original languages. Max Müller also wrote on Indian philosophy in his latter years, and his exertions to stimulate search for Oriental manuscripts and inscriptions were rewarded with important discoveries of early Buddhist scriptures, in their Indian form, made in Japan. He was on particularly friendly terms with native Japanese scholars, and after his death his library was purchased by the university of Tôkyô.
In 1868 Max Müller had been indemnified for his disappointment over the Sanskrit professorship by the establishment of a chair of Comparative Philology to be filled by him. He retired, however, from the actual duties of the post in 1875, when entering upon the editorship of The Sacred Books of the East. The most remarkable external events of his latter years were his delivery of lectures at the restored university of Strassburg in 1872, when he devoted his honorarium to the endowment of a Sanskrit lectureship, and his presidency over the International Congress of Orientalists in 1892. But his days, if uneventful, were busy. He participated in every movement at Oxford of which he could approve, and was intimate with nearly all its men of light and leading; he was a curator of the Bodleian Library, and a delegate of the University Press. He was acquainted with most of the crowned heads
of Europe, and was an especial favourite with the English royal family. His hospitality was ample, especially to visitors from India, where he was far better known than any other European Orientalist. His distinctions, conferred by foreign governments and learned societies, were innumerable, and, having been naturalized shortly after his arrival in England, he received the high honour of being made a privy councillor. In 1898 and 1899 he published autobiographical reminiscences under the title of Auld Lang Syne. He was writing a more detailed autobiography when overtaken by death on the 28th of October 1900. Max Müller married in 1859 Georgiana Adelaide Grenfell, sister of the wives of Charles Kingsley and J. A. Froude. One of his daughters, Mrs Conybeare, distinguished herself by a translation of Scherer’s History of German Literature.
Though undoubtedly a great scholar, Max Müller did not so much represent scholarship pure and simple as her hybrid types—the scholar-author and the scholar-courtier. In the former capacity, though manifesting little of the originality of genius, he rendered vast service by popularizing high truths among high minds. In his public and social character he represented Oriental studies with a brilliancy, and conferred upon them a distinction, which they had not previously enjoyed in Great Britain. There were drawbacks in both respects: the author was too prone to build upon insecure foundations, and the man of the world incurred censure for failings which may perhaps be best indicated by the remark that he seemed too much of a diplomatist. But the sum of foibles seems insignificant in comparison with the life of intense labour dedicated to the service of culture and humanity.
Max Müller’s Collected Works were published in 1903.
MAXWELL, the name of a Scottish family, members of which have held the titles of earl of Morton, earl of Nithsdale, Lord Maxwell, and Lord Herries. The name is taken probably from Maccuswell, or Maxwell, near Kelso, whither the family migrated from England about 1100. Sir Herbert Maxwell won great fame by defending his castle of Carlaverock against Edward I. in 1300; another Sir Herbert was made a lord of the Scottish parliament before 1445; and his great-grandson John, 3rd Lord Maxwell, was killed at Flodden in 1513. John’s son Robert, the 4th lord (d. 1546), was a member of the royal council under James V.; he was also an extraordinary lord of session, high admiral, and warden of the west marches, and was taken prisoner by the English at the rout of Solway Moss in 1542. Robert’s grandson John, 7th Lord Maxwell (1553-1593), was the second son of Robert, the 5th lord (d. 1552), and his wife Beatrix, daughter of James Douglas, 3rd earl of Morton. After the execution of the regent Morton, the 4th earl, in 1581 this earldom was bestowed upon Maxwell, but in 1586 the attainder of the late earl was reversed and he was deprived of his new title. He had helped in 1585 to drive the royal favourite James Stewart, earl of Arran, from power, and he made active preparations to assist the invading Spaniards in 1588. His son John, the 8th lord (c. 1586-1613), was at feud with the Johnstones, who had killed his father in a skirmish, and with the Douglases over the earldom of Morton, which he regarded as his inheritance. After a life of exceptional and continuous lawlessness he escaped from Scotland and in his absence was sentenced to death; having returned to his native country he was seized and was beheaded in Edinburgh. In 1618 John’s brother and heir Robert (d. 1646) was restored to the lordship of Maxwell, and in 1620 was created earl of Nithsdale, surrendering at this time his claim to the earldom of Morton. He and his son Robert, afterwards the 2nd earl, fought under Montrose for Charles I. during the Civil War. Robert died without sons in October 1667, when a cousin John Maxwell, 7th Lord Herries (d. 1677), became third earl.
William, 5th earl of Nithsdale (1676-1744), a grandson of the third earl, was like his ancestor a Roman Catholic and was attached to the cause of the exiled house of Stuart. In 1715 he joined the Jacobite insurgents, being taken prisoner at the battle of Preston and sentenced to death. He escaped, however, 929 from the Tower of London through the courage and devotion of his wife Winifred (d. 1749), daughter of William Herbert, 1st marquess of Powis. He was attainted in 1716 and his titles became extinct, but his estates passed to his son William (d. 1776), whose descendant, William Constable-Maxwell, regained the title of Lord Herries in 1858. The countess of Nithsdale wrote an account of her husband’s escape, which is published in vol. i. of the Transactions of the Society of Antiquaries of Scotland.
A few words may be added about other prominent members of the Maxwell family. John Maxwell (c. 1590-1647), archbishop of Tuam, was a Scottish ecclesiastic who took a leading part in helping Archbishop Laud in his futile attempt to restore the liturgy in Scotland. He was bishop of Ross from 1633 until 1638, when he was deposed by the General Assembly; then crossing over to Ireland he was bishop of Killala and Achonry from 1640 to 1645, and archbishop of Tuam from 1645 until his death. James Maxwell of Kirkconnell (c. 1708-1762), the Jacobite, wrote the Narrative of Charles Prince of Wales’s Expedition to Scotland in 1745, which was printed for the Maitland Club in 1841. Robert Maxwell (1695-1765) was the author of Select Transactions of the Society of Improvers and was a great benefactor to Scottish agriculture. Sir Murray Maxwell (1775-1831), a naval officer, gained much fame by his conduct when his ship the “Alceste” was wrecked in Gaspar Strait in 1817. William Hamilton Maxwell (1792-1850), the Irish novelist, wrote, in addition to several novels, a Life of the Duke of Wellington (1839-1841 and again 1883), and a History of the Irish Rebellion in 1798 (1845 and 1891). Sir Herbert Maxwell, 7th bart. (b. 1845), member of parliament for Wigtownshire from 1880 to 1906, and president of the Society of Antiquaries of Scotland, became well known as a writer, his works including Life and Times of the Right Hon. W. H. Smith (1893); Life of the Duke of Wellington (1899); The House of Douglas (1902); Robert the Bruce (1897) and A Duke of Britain (1895).
MAXWELL, JAMES CLERK (1831-1879), British physicist, was the last representative of a younger branch of the well-known Scottish family of Clerk of Penicuik, and was born at Edinburgh on the 13th of November 1831. He was educated at the Edinburgh Academy (1840-1847) and the university of Edinburgh (1847-1850). Entering at Cambridge in 1850, he spent a term or two at Peterhouse, but afterwards migrated to Trinity. In 1854 he took his degree as second wrangler, and was declared equal with the senior wrangler of his year (E. J. Routh, q.v.) in the higher ordeal of the Smith’s prize examination. He held the chair of Natural Philosophy in Marischal College, Aberdeen, from 1856 till the fusion of the two colleges there in 1860. For eight years subsequently he held the chair of Physics and Astronomy in King’s College, London, but resigned in 1868 and retired to his estate of Glenlair in Kirkcudbrightshire. He was summoned from his seclusion in 1871 to become the first holder of the newly founded professorship of Experimental Physics in Cambridge; and it was under his direction that the plans of the Cavendish Laboratory were prepared. He superintended every step of the progress of the building and of the purchase of the very valuable collection of apparatus with which it was equipped at the expense of its munificent founder the seventh duke of Devonshire (chancellor of the university, and one of its most distinguished alumni). He died at Cambridge on the 5th of November 1879.
For more than half of his brief life he held a prominent position in the very foremost rank of natural philosophers. His contributions to scientific societies began in his fifteenth year, when Professor J. D. Forbes communicated to the Royal Society of Edinburgh a short paper of his on a mechanical method of tracing Cartesian ovals. In his eighteenth year, while still a student in Edinburgh, he contributed two valuable papers to the Transactions of the same society—one of which, “On the Equilibrium of Elastic Solids,” is remarkable, not only on account of its intrinsic power and the youth of its author, but also because in it he laid the foundation of one of the most singular discoveries of his later life, the temporary double refraction produced in viscous liquids by shearing stress. Immediately after taking his degree, he read to the Cambridge Philosophical Society a very novel memoir, “On the Transformation of Surfaces by Bending.” This is one of the few purely mathematical papers he published, and it exhibited at once to experts the full genius of its author. About the same time appeared his elaborate memoir, “On Faraday’s Lines of Force,” in which he gave the first indication of some of those extraordinary electrical investigations which culminated in the greatest work of his life. He obtained in 1859 the Adams prize in Cambridge for a very original and powerful essay, “On the Stability of Saturn’s Rings.” From 1855 to 1872 he published at intervals a series of valuable investigations connected with the “Perception of Colour” and “Colour-Blindness,” for the earlier of which he received the Rumford medal from the Royal Society in 1860. The instruments which he devised for these investigations were simple and convenient, but could not have been thought of for the purpose except by a man whose knowledge was co-extensive with his ingenuity. One of his greatest investigations bore on the “Kinetic Theory of Gases.” Originating with D. Bernoulli, this theory was advanced by the successive labours of John Herapath, J. P. Joule, and particularly R. Clausius, to such an extent as to put its general accuracy beyond a doubt; but it received enormous developments from Maxwell, who in this field appeared as an experimenter (on the laws of gaseous friction) as well as a mathematician. He wrote an admirable textbook of the Theory of Heat (1871), and a very excellent elementary treatise on Matter and Motion (1876).
But the great work of his life was devoted to electricity. He began by reading, with the most profound admiration and attention, the whole of Faraday’s extraordinary self-revelations, and proceeded to translate the ideas of that master into the succinct and expressive notation of the mathematicians. A considerable part of this translation was accomplished during his career as an undergraduate in Cambridge. The writer had the opportunity of perusing the MS. of “On Faraday’s Lines of Force,” in a form little different from the final one, a year before Maxwell took his degree. His great object, as it was also the great object of Faraday, was to overturn the idea of action at a distance. The splendid researches of S. D. Poisson and K. F. Gauss had shown how to reduce all the phenomena of statical electricity to mere attractions and repulsions exerted at a distance by particles of an imponderable on one another. Lord Kelvin (Sir W. Thomson) had, in 1846, shown that a totally different assumption, based upon other analogies, led (by its own special mathematical methods) to precisely the same results. He treated the resultant electric force at any point as analogous to the flux of heat from sources distributed in the same manner as the supposed electric particles. This paper of Thomson’s, whose ideas Maxwell afterwards developed in an extraordinary manner, seems to have given the first hint that there are at least two perfectly distinct methods of arriving at the known formulae of statical electricity. The step to magnetic phenomena was comparatively simple; but it was otherwise as regards electro-magnetic phenomena, where current electricity is essentially involved. An exceedingly ingenious, but highly artificial, theory had been devised by W. E. Weber, which was found capable of explaining all the phenomena investigated by Ampère as well as the induction currents of Faraday. But this was based upon the assumption of a distance-action between electric particles, the intensity of which depended on their relative motion as well as on their position. This was, of course, even more repugnant to Maxwell’s mind than the statical distance-action developed by Poisson. The first paper of Maxwell’s in which an attempt at an admissible physical theory of electromagnetism was made was communicated to the Royal Society in 1867. But the theory, in a fully developed form, first appeared in 1873 in his great treatise on Electricity and Magnetism. This work was one of the most splendid monuments ever raised by the genius of a single individual. Availing himself of the admirable generalized co-ordinate system of Lagrange, Maxwell showed how to reduce all electric and magnetic phenomena to stresses and motions of a material medium, and, as one preliminary, but excessively severe, test of the truth of his theory, he pointed out that (if the electro-magnetic medium be that which is required for the explanation of the phenomena of light) the velocity of light in vacuo should 930 be numerically the same as the ratio of the electro-magnetic and electrostatic units. In fact, the means of the best determinations of each of these quantities separately agree with one another more closely than do the various values of either.
One of Maxwell’s last great contributions to science was the editing (with copious original notes) of the Electrical Researches of the Hon. Henry Cavendish, from which it appeared that Cavendish, already famous by many other researches (such as the mean density of the earth, the composition of water, &c.), must be looked on as, in his day, a man of Maxwell’s own stamp as a theorist and an experimenter of the very first rank.
In private life Clerk Maxwell was one of the most lovable of men, a sincere and unostentatious Christian. Though perfectly free from any trace of envy or ill-will, he yet showed on fit occasion his contempt for that pseudo-science which seeks for the applause of the ignorant by professing to reduce the whole system of the universe to a fortuitous sequence of uncaused events.
His collected works, including the series of articles on the properties of matter, such as “Atom,” “Attraction,” “Capillary Action,” “Diffusion,” “Ether,” &c., which he contributed to the 9th edition of this encyclopaedia, were issued in two volumes by the Cambridge University Press in 1890; and an extended biography, by his former schoolfellow and lifelong friend Professor Lewis Campbell, was published in 1882.
MAXWELLTOWN, a burgh of barony and police burgh of Kirkcudbrightshire, Scotland. Pop. (1901), 5796. It lies on the Nith, opposite to Dumfries, with which it is connected by three bridges, being united with it for parliamentary purposes. It has a station on the Glasgow & South-Western line from Dumfries to Kirkcudbright. Its public buildings include a court-house, the prison for the south-west of Scotland, and an observatory and museum, housed in a disused windmill. The chief manufactures are woollens and hosiery, besides dyeworks and sawmills. It was a hamlet known as Bridgend up till 1810, in which year it was erected into a burgh of barony under its present name. To the north-west lies the parish of Terregles, said to be a corruption of Tir-eglwys (terra ecclesia, that is, “Kirk land”). The parish contains the beautiful ruin of Lincluden Abbey (see Dumfries), and Terregles House, once the seat of William Maxwell, last earl of Nithsdale. In the parish of Lochrutton, a few miles south-west of Maxwelltown, there is a good example of a stone circle, the “Seven Grey Sisters,” and an old peel-tower in the Mains of Hills.
MAY, PHIL (1864-1903), English caricaturist, was born at Wortley, near Leeds, on the 22nd of April 1864, the son of an engineer. His father died when the child was nine years old, and at twelve he had begun to earn his living. Before he was fifteen he had acted as time-keeper at a foundry, had tried to become a jockey, and had been on the stage at Scarborough and Leeds. When he was about seventeen he went to London with a sovereign in his pocket. He suffered extreme want, sleeping out in the parks and streets, until he obtained employment as designer to a theatrical costumier. He also drew posters and cartoons, and for about two years worked for the St Stephen’s Review, until he was advised to go to Australia for his health. During the three years he spent there he was attached to the Sydney Bulletin, for which many of his best drawings were made. On his return to Europe he went to Paris by way of Rome, where he worked hard for some time before he appeared in 1892 in London to resume his interrupted connexion with the St Stephen’s Review. His studies of the London “guttersnipe” and the coster-girl rapidly made him famous. His overflowing sense of fun, his genuine sympathy with his subjects, and his kindly wit were on a par with his artistic ability. It was often said that the extraordinary economy of line which was a characteristic feature of his drawings had been forced upon him by the deficiencies of the printing machines of the Sydney Bulletin. It was in fact the result of a laborious process which involved a number of preliminary sketches, and of a carefully considered system of elimination. His later work included some excellent political portraits. He became a regular member of the staff of Punch in 1896, and in his later years his services were retained exclusively for Punch and the Graphic. He died on the 5th of August 1903.
There was an exhibition of his drawings at the Fine Arts Society in 1895, and another at the Leicester Galleries in 1903. A selection of his drawings contributed to the periodical press and from Phil May’s Annual and Phil May’s Sketch Books, with a portrait and biography of the artist, entitled The Phil May Folio, appeared in 1903.
MAY, THOMAS (1595-1650), English poet and historian, son of Sir Thomas May of Mayfield, Sussex, was born in 1595. He entered Sidney Sussex College, Cambridge, in 1609, and took his B.A. degree three years later. His father having lost his fortune and sold the family estate, Thomas May, who was hampered by an impediment in his speech, made literature his profession. In 1620 he produced The Heir, an ingeniously constructed comedy, and, probably about the same time, The Old Couple, which was not printed until 1658. His other dramatic works are classical tragedies on the subjects of Antigone, Cleopatra, and Agrippina. F. G. Fleay has suggested that the more famous anonymous tragedy of Nero (printed 1624, reprints in A. H. Bullen’s Old English Plays and the Mermaid Series) should also be assigned to May. But his most important work in the department of pure literature was his translation (1627) into heroic couplets of the Pharsalia of Lucan. Its success led May to write a continuation of Lucan’s narrative down to the death of Caesar. Charles I. became his patron, and commanded him to write metrical histories of Henry II. and Edward III., which were completed in 1635. When the earl of Pembroke, then lord chamberlain, broke his staff across May’s shoulders at a masque, the king took him under his protection as “my poet,” and Pembroke made him an apology accompanied with a gift of £50. These marks of the royal favour seem to have led May to expect the posts of poet-laureate and city chronologer when they fell vacant on the death of Ben Jonson in 1637, but he was disappointed, and he forsook the court and attached himself to the party of the Parliament. In 1646 he is styled one of the “secretaries” of the Parliament, and in 1647 he published his best known work, The History of the Long Parliament. In this official apology for the moderate or Presbyterian party, he professes to give an impartial statement of facts, unaccompanied by any expression of party or personal opinion. If he refrained from actual invective, he accomplished his purpose, according to Guizot, by “omission, palliation and dissimulation.” Accusations of this kind were foreseen by May, who says in his preface that if he gives more information about the Parliament men than their opponents it is that he was more conversant with them and their affairs. In 1650 he followed this with another work written with a more definite bias, a Breviary of the History of the Parliament of England, in Latin and English, in which he defended the position of the Independents. He stopped short of the catastrophe of the king’s execution, and it seems likely that his subservience to Cromwell was not quite voluntary. In February 1650 he was brought to London from Weymouth under a strong guard for having spread false reports of the Parliament and of Cromwell. He died on the 13th of November in the same year, and was buried in Westminster Abbey, but after the Restoration his remains were exhumed and buried in a pit in the yard of St Margaret’s, Westminster. May’s change of side made him many bitter enemies, and he is the object of scathing condemnation from many of his contemporaries.
There is a long notice of May in the Biographia Britannica. See also W. J. Courthope, Hist. of Eng. Poetry, vol. 3; and Guizot, Études biographiques sur la révolution d’Angleterre (pp. 403-426, ed. 1851).
MAY, or Mey(e), WILLIAM (d. 1560), English divine, was the brother of John May, bishop of Carlisle. He was educated at Cambridge, where he was a fellow of Trinity Hall, and in 1537, president of Queen’s College. May heartily supported the Reformation, signed the Ten Articles in 1536, and helped in the production of The Institution of a Christian Man. He had close connexion with the diocese of Ely, being 931 successively chancellor, vicar-general and prebendary. In 1545 he was made a prebendary of St Paul’s, and in the following year dean. His favourable report on the Cambridge colleges saved them from dissolution. He was dispossessed during the reign of Mary, but restored to the deanery on Elizabeth’s accession. He died on the day of his election to the archbishopric of York.
MAY, the fifth month of our modern year, the third of the old Roman calendar. The origin of the name is disputed; the derivation from Maia, the mother of Mercury, to whom the Romans were accustomed to sacrifice on the first day of this month, is usually accepted. The ancient Romans used on May Day to go in procession to the grotto of Egeria. From the 28th of April to the 2nd of May was kept the festival in honour of Flora, goddess of flowers. By the Romans the month was regarded as unlucky for marriages, owing to the celebration on the 9th, 11th and 13th of the Lemuria, the festival of the unhappy dead. This superstition has survived to the present day.
In medieval and Tudor England, May Day was a great public holiday. All classes of the people, young and old alike, were up with the dawn, and went “a-Maying” in the woods. Branches of trees and flowers were borne back in triumph to the towns and villages, the centre of the procession being occupied by those who shouldered the maypole, glorious with ribbons and wreaths. The maypole was usually of birch, and set up for the day only; but in London and the larger towns the poles were of durable wood and permanently erected. They were special eyesores to the Puritans. John Stubbes in his Anatomy of Abuses (1583) speaks of them as those “stinckyng idols,” about which the people “leape and daunce, as the heathen did.” Maypoles were forbidden by the parliament in 1644, but came once more into favour at the Restoration, the last to be erected in London being that set up in 1661. This pole, which was of cedar, 134 ft. high, was set up by twelve British sailors under the personal supervision of James II., then duke of York and lord high admiral, in the Strand on or about the site of the present church of St Mary’s-in-the-Strand. Taken down in 1717, it was conveyed to Wanstead Park in Essex, where it was fixed by Sir Isaac Newton as part of the support of a large telescope, presented to the Royal Society by a French astronomer.
For an account of the May Day survivals in rural England see P. H. Ditchfield, Old English Customs extant at Present Times (1897).
MAY, ISLE OF, an island belonging to Fifeshire, Scotland, at the entrance to the Firth of Forth, 5 m. S.E. of Crail and Anstruther. It has a N.W. to S.E. trend, is more than 1 m. long, and measures at its widest about 1⁄3 m. St Adrian, who had settled here, was martyred by the Danes about the middle of the 9th century. The ruins of the small chapel dedicated to him, which was a favourite place of pilgrimage, still exist. The place where the pilgrims—of whom James IV. was often one—landed is yet known as Pilgrims’ Haven, and traces may yet be seen of the various wells of St Andrew, St John, Our Lady, and the Pilgrims, though their waters have become brackish. In 1499 Sir Andrew Wood of Largo, with the “Yellow Carvel” and “Mayflower,” captured the English seaman Stephen Bull, and three ships, after a fierce fight which took place between the island and the Bass Rock. In 1636 a coal beacon was lighted on the May and maintained by Alexander Cunningham of Barns. The oil light substituted for it in 1816 was replaced in 1888 by an electric light.
MAYA, an important tribe and stock of American Indians, the dominant race of Yucatan and other states of Mexico and part of Central America at the time of the Spanish conquest. They were then divided into many nations, chief among them being the Maya proper, the Huastecs, the Tzental, the Pokom, the Mame and the Cakchiquel and Quiché. They were spread over Yucatan, Vera Cruz, Tabasco, Campeche, and Chiapas in Mexico, and over the greater part of Guatemala and Salvador. In civilization the Mayan peoples rivalled the Aztecs. Their traditions give as their place of origin the extreme north; thence a migration took place, perhaps at the beginning of the Christian era. They appear to have reached Yucatan as early as the 5th century. From the evidence of the Quiché chronicles, which are said to date back to about A.D. 700, Guatemala was shortly afterwards overrun. Physically the Mayans are a dark-skinned, round-headed, short and sturdy type. Although they were already decadent when the Spaniards arrived they made a fierce resistance. They still form the bulk of the inhabitants of Yucatan. For their culture, ruined cities, &c. see Central America and Mexico.
MAYAGUEZ, the third largest city of Porto Rico, a seaport, and the seat of government of the department of Mayaguez, on the west coast, at the mouth of Rio Yaguez, about 72 m. W. by S. of San Juan. Pop. of the city (1899), 15,187, including 1381 negroes and 4711 of mixed races; (1910), 16,591; of the municipal district, 35,700 (1899), of whom 2687 were negroes and 9933 were of mixed races. Mayaguez is connected by the American railroad of Porto Rico with San Juan and Ponce, and it is served regularly by steamboats from San Juan, Ponce and New York, although its harbour is not accessible to vessels drawing more than 16 ft. of water. It is situated at the foot of Las Mesas mountains and commands picturesque views. The climate is healthy and good water is obtained from the mountain region. From the shipping district along the water-front a thoroughfare leads to the main portion of the city, about 1 m. distant. There are four public squares, in one of which is a statue of Columbus. Prominent among the public buildings are the City Hall (containing a public library), San Antonio Hospital, Roman Catholic churches, a Presbyterian church, the court-house and a theatre. The United States has an agricultural experiment station here, and the Insular Reform School is 1 m. south of the city. Coffee, sugar-cane and tropical fruits are grown in the surrounding country; and the business of the city consists chiefly in their export and the import of flour. Among the manufactures are sugar, tobacco and chocolate. Mayaguez was founded about the middle of the 18th century on the site of a hamlet which was first settled about 1680. It was incorporated as a town in 1836, and became a city in 1873. In 1841 it was nearly all destroyed by fire.
MAYAVARAM, a town of British India, in the Tanjore district of Madras, on the Cauvery river; junction on the South Indian railway, 174 m. S.W. of Madras. Pop. (1901), 24,276. It possesses a speciality of fine cotton and silk cloth, known as Kornad from the suburb in which the weavers live. During October and November the town is the scene of a great pilgrimage to the holy waters of the Cauvery.
MAYBOLE, a burgh of barony and police burgh of Ayrshire, Scotland. Pop. (1901), 5892. It is situated 9 m. S. of Ayr and 501⁄4 m. S.W. of Glasgow by the Glasgow & South-Western railway. It is an ancient place, having received a charter from Duncan II. in 1193. In 1516 it was made a burgh of regality, but for generations it remained under the subjection of the Kennedys, afterwards earls of Cassillis and marquesses of Ailsa, the most powerful family in Ayrshire. Of old Maybole was the capital of the district of Carrick, and for long its characteristic feature was the family mansions of the barons of Carrick. The castle of the earls of Cassillis still remains. The public buildings include the town-hall, the Ashgrove and the Lumsden fresh-air fortnightly homes, and the Maybole combination poorhouse. The leading manufactures are of boots and shoes and agricultural implements. Two miles to the south-west are the ruins of Crossraguel (Cross of St Regulus) Abbey, founded about 1240. Kirkoswald, where Burns spent his seventeenth year, learning land-surveying, lies a little farther west. In the parish churchyard lie “Tam o’ Shanter” (Douglas Graham) and “Souter Johnnie” (John Davidson). Four miles to the west of Maybole on the coast is Culzean Castle, the chief seat of the marquess of Ailsa, dating from 1777; it stands on a basaltic cliff, beneath which are the Coves of Culzean, once the retreat of outlaws and a resort of the fairies. Farther south are the ruins of Turnberry Castle, where Robert Bruce is said to have been born. A few miles to the north of Culzean are the ruins of Dunure Castle, an ancient stronghold of the Kennedys.
MAYEN, a town of Germany, in the Prussian Rhine province, on the northern declivity of the Eifel range, 16 m. W. from Coblenz, on the railway Andernach-Gerolstein. Pop. (1905), 13,435. It is still partly surrounded by medieval walls, and the ruins of a castle rise above the town. There are some small industries, embracing textile manufactures, oil mills and tanneries, and a trade in wine, while near the town are extensive quarries of basalt. Having been a Roman settlement, Mayen became a town in 1291. In 1689 it was destroyed by the French.
MAYENNE, CHARLES OF LORRAINE, Duke of (1554-1611), second son of Francis of Lorraine, second duke of Guise, was born on the 26th of March 1554. He was absent from France at the time of the massacre of Saint Bartholomew, but took part in the siege of La Rochelle in the following year, when he was created duke and peer of France. He went with Henry of Valois, duke of Anjou (afterwards Henry III.), on his election as king of Poland, but soon returned to France to become the energetic supporter and lieutenant of his brother, the 3rd duke of Guise. In 1577 he gained conspicuous successes over the Huguenot forces in Poitou. As governor of Burgundy he raised his province in the cause of the League in 1585. The assassination of his brothers at Blois on the 23rd and 24th of December 1588 left him at the head of the Catholic party. The Venetian ambassador, Mocenigo, states that Mayenne had warned Henry III. that there was a plot afoot to seize his person and to send him by force to Paris. At the time of the murder he was at Lyons, where he received a letter from the king saying that he had acted on his warning, and ordering him to retire to his government. Mayenne professed obedience, but immediately made preparations for marching on Paris. After a vain attempt to recover the persons of those of his relatives who had been arrested at Blois he proceeded to recruit troops in his government of Burgundy and in Champagne. Paris was devoted to the house of Guise and had been roused to fury by the news of the murder. When Mayenne entered the city in February 1589 he found it dominated by representatives of the sixteen quarters of Paris, all fanatics of the League. He formed a council general to direct the affairs of the city and to maintain relations with the other towns faithful to the League. To this council each quarter sent four representatives, and Mayenne added representatives of the various trades and professions of Paris in order to counterbalance this revolutionary element. He constituted himself “lieutenant-general of the state and crown of France,” taking his oath before the parlement of Paris. In April he advanced on Tours. Henry III. in his extremity sought an alliance with Henry of Navarre, and the allied forces drove the leaguers back, and had laid siege to Paris, when the murder of Henry III. by a Dominican fanatic changed the face of affairs and gave new strength to the Catholic party.
Mayenne was urged to claim the crown for himself, but he was faithful to the official programme of the League and proclaimed Charles, cardinal of Bourbon, at that time a prisoner in the hands of Henry IV., as Charles X. Henry IV. retired to Dieppe, followed by Mayenne, who joined his forces with those of his cousin Charles, duke of Aumale, and Charles de Cossé, comte de Brissac, and engaged the royal forces in a succession of fights in the neighbourhood of Arques (September 1589). He was defeated and out-marched by Henry IV., who moved on Paris, but retreated before Mayenne’s forces. In 1590 Mayenne received additions to his army from the Spanish Netherlands, and took the field again, only to suffer complete defeat at Ivry (March 14, 1590). He then escaped to Mantes, and in September collected a fresh army at Meaux, and with the assistance of Alexander Farnese, prince of Parma, sent by Philip II., raised the siege of Paris, which was about to surrender to Henry IV. Mayenne feared with reason the designs of Philip II., and his difficulties were increased by the death of Charles X., the “king of the league.” The extreme section of the party, represented by the Sixteen, urged him to proceed to the election of a Catholic king and to accept the help and the claims of their Spanish allies. But Mayenne, who had not the popular gifts of his brother, the duke of Guise, had no sympathy with the demagogues, and himself inclined to the moderate side of his party, which began to urge reconciliation with Henry IV. He maintained the ancient forms of the constitution against the revolutionary policy of the Sixteen, who during his absence from Paris took the law into their own hands and in November 1591 executed one of the leaders of the more moderate party, Barnabé Brisson, president of the parlement. He returned to Paris and executed four of the chief malcontents. The power of the Sixteen diminished from that time, but with it the strength of the League.1
Mayenne entered into negotiations with Henry IV. while he was still appearing to consider with Philip II. the succession to the French crown of the Infanta Elizabeth, granddaughter, through her mother Elizabeth of Valois, of Henry II. He demanded that Henry IV. should accomplish his conversion to Catholicism before he was recognized by the leaguers. He also desired the continuation to himself of the high offices which had accumulated in his family and the reservation of their provinces to his relatives among the leaguers. In 1593 he summoned the States General to Paris and placed before them the claims of the Infanta, but they protested against foreign intervention. Mayenne signed a truce at La Villette on the 31st of July 1593. The internal dissensions of the league continued to increase, and the principal chiefs submitted. Mayenne finally made his peace only in October 1595. Henry IV. allowed him the possession of Chalon-sur-Saône, of Seurre and Soissons for three years, made him governor of the Isle of France and paid a large indemnity. Mayenne died at Soissons on the 3rd of October 1611.
A Histoire de la vie et de la mort du duc de Mayenne appeared at Lyons in 1618. See also J. B. H. Capefigue, Hist. de la Réforme, de la ligue et du règne de Henri IV. (8 vols., 1834-1835) and the literature dealing with the house of Guise (q.v.).
1 The estates of the League in 1593 were the occasion of the famous Satire Ménippée, circulated in MS. in that year, but only printed at Tours in 1594. It was the work of a circle of men of letters who belonged to the politiques or party of the centre and ridiculed the League. The authors were Pierre Le Roy, Jean Passerat, Florent Chrestien, Nicolas Rapin and Pierre Pithou. It opened with “La vertu du catholicon,” in which a Spanish quack (the cardinal of Plaisance) vaunts the virtues of his drug “catholicon composé,” manufactured in the Escurial, while a Lorrainer rival (the cardinal of Pellevé) tries to sell a rival cure. A mock account of the estates, with harangues delivered by Mayenne and the other chiefs of the League, followed. Mayenne’s discourse is said to have been written by the jurist Pithou.
MAYENNE, a department of north-western France, three-fourths of which formerly belonged to Lower Maine and the remainder to Anjou, bounded on the N. by Manche and Orne, E. by Sarthe, S. by Maine-et-Loire and W. by Ille-et-Vilaine. Area, 2012 sq. m. Pop. (1906), 305,457. Its ancient geological formations connect it with Brittany. The surface is agreeably undulating; forests are numerous, and the beauty of the cultivated portions is enhanced by the hedgerows and lines of trees by which the farms are divided. The highest point of the department, and indeed of the whole north-west of France, is the Mont des Avaloirs (1368 ft.). Hydrographically Mayenne belongs to the basins of the Loire, the Vilaine and the Sélune, the first mentioned draining by far the larger part of the entire area. The principal stream is the Mayenne, which passes successively from north to south through Mayenne, Laval and Château-Gontier; by means of weirs and sluices it is navigable below Mayenne, but traffic is inconsiderable. The chief affluents are the Jouanne on the left, and on the right the Colmont, the Ernée and the Oudon. A small area in the east of the department drains by the Erve into the Sarthe; the Vilaine rises in the west, and in the north-west two small rivers flow into the Sélune. The climate of Mayenne is generally healthy except in the neighbourhood of the numerous marshes. The temperature is lower and the moisture of the atmosphere greater than in the neighbouring departments; the rainfall (about 32 in. annually) is above the average for France.
Agriculture and stock-raising are prosperous. A large number of horned cattle are reared, and in no other French department are 933 so many horses found within the same area; the breed, that of Craon, is famed for its strength. Craon has also given its name to the most prized breed of pigs in western France. Mayenne produces excellent butter and poultry and a large quantity of honey. The cultivation of the vine is very limited, and the most common beverage is cider. Wheat, oats, barley and buckwheat, in the order named, are the most important crops, and a large quantity of flax and hemp is produced. Game is abundant. The timber grown is chiefly beech, oak, birch, elm and chestnut. The department produces antimony, auriferous quartz and coal. Marble, slate and other stone are quarried. There are several chalybeate springs. The industries include flour-milling, brick and tile making, brewing, cotton and wool spinning, and the production of various textile fabrics (especially ticking) for which Laval and Château-Gontier are the centres, agricultural implement making, wood and marble sawing, tanning and dyeing. The exports include agricultural produce, live-stock, stone and textiles; the chief imports are coal, brandy, wine, furniture and clothing. The department is served by the Western railway. It forms part of the circumscriptions of the IV. army corps, the académie (educational division) of Rennes, and the court of appeal of Angers. It comprises three arrondissements (Laval, Château-Gontier and Mayenne), with 27 cantons and 276 communes. Laval, the capital, is the seat of a bishopric of the province of Tours. The other principal towns are Château-Gontier and Mayenne, which are treated under separate headings. The following places are also of interest: Evron, which has a church of the 12th and 13th centuries; Jublains, with a Roman fort and other Roman remains; Lassay, with a fine château of the 14th and 16th centuries; and Ste Suzanne, which has remains of medieval ramparts and a fortress with a keep of the Romanesque period.
MAYENNE, a town of north-western France, capital of an arrondissement in the department of Mayenne, 19 m. N.N.E. of Laval by rail. Pop., town 7003, commune 10,020. Mayenne is an old feudal town, irregularly built on hills on both sides of the river Mayenne. Of the old castle overlooking the river several towers remain, one of which has retained its conical roof; the vaulted chambers and chapel are ornamented in the style of the 13th century; the building is now used as a prison. The church of Notre-Dame, beside which there is a statue of Joan of Arc, dates partly from the 12th century; the choir was rebuilt in the 19th century. In the Place de Cheverus is a statue, by David of Angers, to Cardinal Jean de Cheverus (1768-1836), who was born in Mayenne. Mayenne has a subprefecture, tribunals of first instance and of commerce, a chamber of arts and manufactures, and a board of trade-arbitration. There is a school of agriculture in the vicinity. The chief industry of the place is the manufacture of tickings, linen, handkerchiefs and calicoes.
Mayenne had its origin in the castle built here by Juhel, baron of Mayenne, the son of Geoffrey of Maine, in the beginning of the 11th century. It was taken by the English in 1424, and several times suffered capture by the opposing parties in the wars of religion and the Vendée. At the beginning of the 16th century the territory passed to the family of Guise, and in 1573 was made a duchy in favour of Charles of Mayenne, leader of the League.
MAYER, JOHANN TOBIAS (1723-1762), German astronomer, was born at Marbach, in Würtemberg, on the 17th of February 1723, and brought up at Esslingen in poor circumstances. A self-taught mathematician, he had already published two original geometrical works when, in 1746, he entered J. B. Homann’s cartographic establishment at Nuremberg. Here he introduced many improvements in map-making, and gained a scientific reputation which led (in 1751) to his election to the chair of economy and mathematics in the university of Göttingen. In 1754 he became superintendent of the observatory, where he laboured with great zeal and success until his death, on the 20th of February 1762. His first important astronomical work was a careful investigation of the libration of the moon (Kosmographische Nachrichten, Nuremberg, 1750), and his chart of the full moon (published in 1775) was unsurpassed for half a century. But his fame rests chiefly on his lunar tables, communicated in 1752, with new solar tables, to the Royal Society of Göttingen, and published in their Transactions (vol. ii.). In 1755 he submitted to the English government an amended body of MS. tables, which James Bradley compared with the Greenwich observations, and found to be sufficiently accurate to determine the moon’s place to 75″, and consequently the longitude at sea to about half a degree. An improved set was afterwards published in London (1770), as also the theory (Theoria lunae juxta systema Newtonianum, 1767) upon which the tables are based. His widow, by whom they were sent to England, received in consideration from the British government a grant of £3000. Appended to the London edition of the solar and lunar tables are two short tracts—the one on determining longitude by lunar distances, together with a description of the repeating circle (invented by Mayer in 1752), the other on a formula for atmospheric refraction, which applies a remarkably accurate correction for temperature.
Mayer left behind him a considerable quantity of manuscript, part of which was collected by G. C. Lichtenberg and published in one volume (Opera inedita, Göttingen, 1775). It contains an easy and accurate method for calculating eclipses; an essay on colour, in which three primary colours are recognized; a catalogue of 998 zodiacal stars; and a memoir, the earliest of any real value, on the proper motion of eighty stars, originally communicated to the Göttingen Royal Society in 1760. The manuscript residue includes papers on atmospheric refraction (dated 1755), on the motion of Mars as affected by the perturbations of Jupiter and the Earth (1756), and on terrestrial magnetism (1760 and 1762). In these last Mayer sought to explain the magnetic action of the earth by a modification of Euler’s hypothesis, and made the first really definite attempt to establish a mathematical theory of magnetic action (C. Hansteen, Magnetismus der Erde, i. 283). E. Klinkerfuss published in 1881 photo-lithographic reproductions of Mayer’s local charts and general map of the moon; and his star-catalogue was re-edited by F. Baily in 1830 (Memoirs Roy. Astr. Soc. iv. 391) and by G. F. J. A. Auvers in 1894.
Authorities.—A. G. Kästner, Elogium Tobiae Mayeri (Göttingen, 1762); Connaissance des temps, 1767, p. 187 (J. Lalande); Monatliche Correspondenz viii. 257, ix. 45, 415, 487, xi. 462; Allg. Geographische Ephemeriden iii. 116, 1799 (portrait); Berliner Astr. Jahrbuch, Suppl. Bd. iii. 209, 1797 (A. G. Kästner); J. B. J. Delambre, Hist. de l’Astr. au XVIIIe siècle, p. 429; R. Grant, Hist. of Phys. Astr. pp. 46, 488, 555; A. Berry, Short Hist. of Astr. p. 282; J. S. Pütter, Geschichte von der Universität zu Göttingen, i. 68; J. Gehler, Physik. Wörterbuch neu bearbeitet, vi. 746, 1039; Allg. Deutsche Biographie (S. Günther).
MAYER, JULIUS ROBERT (1814-1878), German physicist, was born at Heilbronn on the 25th of November 1814, studied medicine at Tübingen, Munich and Paris, and after a journey to Java in 1840 as surgeon of a Dutch vessel obtained a medical post in his native town. He claims recognition as an independent a priori propounder of the “First Law of Thermodynamics,” but more especially as having early and ably applied that law to the explanation of many remarkable phenomena, both cosmical and terrestrial. His first little paper on the subject, “Bemerkungen über die Kräfte der unbelebten Natur,” appeared in 1842 in Liebig’s Annalen, five years after the republication, in the same journal, of an extract from K. F. Mohr’s paper on the nature of heat, and three years later he published Die organische Bewegung in ihren Zusammenhange mit dem Stoffwechsel.
It has been repeatedly claimed for Mayer that he calculated the value of the dynamical equivalent of heat, indirectly, no doubt, but in a manner altogether free from error, and with a result according almost exactly with that obtained by J. P. Joule after years of patient labour in direct experimenting. This claim on Mayer’s behalf was first shown to be baseless by W. Thomson (Lord Kelvin) and P. G. Tait in an article on “Energy,” published in Good Words in 1862, which gave rise to a long but lively discussion. A calm and judicial annihilation of the claim is to be found in a brief article by Sir G. G. Stokes, Proc. Roy. Soc., 1871, p. 54. See also Maxwell’s Theory of Heat, chap. xiii. Mayer entirely ignored the grand fundamental principle laid down by Sadi Carnot—that nothing can be concluded as to the relation between heat and work from an experiment in which the working substance is left at the end of an operation in a different physical state from that in which it was at the commencement. Mayer has also been styled the discoverer of the fact that heat consists in (the energy of) motion, a matter settled at the very end of the 18th century by Count Rumford and Sir H. Davy; but in the teeth of this statement we have Mayer’s own words, “We might much rather assume the contrary—that in order to become heat motion must cease to be motion.”
Mayer’s real merit consists in the fact that, having for himself made out, on inadequate and even questionable grounds, the conservation of energy, and having obtained (though by inaccurate reasoning) a numerical result correct so far as his data permitted, he applied the principle with great power and insight to the explanation of numerous physical phenomena. His papers, which were republished in a single volume with the title Die Mechanik der Wärme (3rd ed., 1893), are of unequal merit. But some, especially those on Celestial Dynamics and Organic Motion, are admirable examples of what really valuable work may be effected by a man of high intellectual powers, in spite of imperfect information and defective logic.
Different, and it would appear exaggerated, estimates of Mayer are given in John Tyndall’s papers in the Phil. Mag., 1863-1864 (whose avowed object was “to raise a noble and a suffering man to the position which his labours entitled him to occupy”), and in E. Dühring’s Robert Mayer, der Galilei des neunzehnten Jahrhunderts, Chemnitz, 1880. Some of the simpler facts of the case are summarized by Tait in the Phil. Mag., 1864, ii. 289.
MAYFLOWER, the vessel which carried from Southampton, England, to Plymouth, Massachusetts, the Pilgrims who established the first permanent colony in New England. It was of about 180 tons burden, and in company with the “Speedwell” sailed from Southampton on the 5th of August 1620, the two having on board 120 Pilgrims. After two trials the “Speedwell” was pronounced unseaworthy, and the “Mayflower” sailed alone from Plymouth, England, on the 6th of September with the 100 (or 102) passengers, some 41 of whom on the 11th of November (O.S.) signed the famous “Mayflower Compact” in Provincetown Harbor, and a small party of whom, including William Bradford, sent to choose a place for settlement, landed at what is now Plymouth, Massachusetts, on the 11th of December (21st N.S.), an event which is celebrated, as Forefathers’ Day, on the 22nd of December. A “General Society of Mayflower Descendants” was organized in 1894 by lineal descendants of passengers of the “Mayflower” to “preserve their memory, their records, their history, and all facts relating to them, their ancestors and their posterity.” Every lineal descendant, over eighteen years of age, of any passenger of the “Mayflower” is eligible to membership. Branch societies have since been organized in several of the states and in the District of Columbia, and a triennial congress is held in Plymouth.
See Azel Ames, The May-Flower and Her Log (Boston, 1901); Blanche McManus, The Voyage of the Mayflower (New York, 1897); The General Society of Mayflower: Meetings, Officers and Members, arranged in State Societies, Ancestors and their Descendants (New York, 1901). Also the articles Plymouth, Mass.; Massachusetts, § History; Pilgrim; and Provincetown, Mass.
MAY-FLY. The Mayflies belong to the Ephemeridae, a remarkable family of winged insects, included by Linnaeus in his order Neuroptera, which derive their scientific name from ἐφήμερος, in allusion to their very short lives. In some species it is possible that they have scarcely more than one day’s existence, but others are far longer lived, though the extreme limit is probably rarely more than a week. The family has very sharply defined characters, which separate its members at once from all other neuropterous (or pseudo-neuropterous) groups.
These insects are universally aquatic in their preparatory states. The eggs are dropped into the water by the female in large masses, resembling, in some species, bunches of grapes in miniature. Probably several months elapse before the young larvae are excluded. The sub-aquatic condition lasts a considerable time: in Cloeon, a genus of small and delicate species, Sir J. Lubbock (Lord Avebury) proved it to extend over more than six months; but in larger and more robust genera (e.g. Palingenia) there appears reason to believe that the greater part of three years is occupied in preparatory conditions.
The larva is elongate and campodeiform. The head is rather large, and is furnished at first with five simple eyes of nearly equal size; but as it increases in size the homologues of the facetted eyes of the imago become larger, whereas those equivalent to the ocelli remain small. The antennae are long and thread-like, composed at first of few joints, but the number of these latter apparently increases at each moult. The mouth parts are well developed, consisting of an upper lip, powerful mandibles, maxillae with three-jointed palpi, and a deeply quadrifid labium or lower lip with three-jointed labial palpi. Distinct and conspicuous maxillulae are associated with the tongue or hypopharynx. There are three distinct and large thoracic segments, whereof the prothorax is narrower than the others; the legs are much shorter and stouter than in the winged insect, with monomerous tarsi terminated by a single claw. The abdomen consists of ten segments, the tenth furnished with long and slender multi-articulate tails, which appear to be only two in number at first, but an intermediate one gradually develops itself (though this latter is often lost in the winged insect). Respiration is effected by means of external gills placed along both sides of the dorsum of the abdomen and hinder segments of the thorax. These vary in form: in some species they are entire plates, in others they are cut up into numerous divisions, in all cases traversed by numerous tracheal ramifications. According to the researches of Lubbock and of E. Joly, the very young larvae have no breathing organs, and respiration is effected through the skin. Lubbock traced at least twenty moults in Cloeon; at about the tenth rudiments of the wing-cases began to appear. These gradually become larger, and when so the creature may be said to have entered its “nymph” stage; but there is no condition analogous to the pupa-stage of insects with complete metamorphoses.
There may be said to be three or four different modes of life in these larvae: some are fossorial, and form tubes in the mud or clay in which they live; others are found on or beneath stones; while others again swim and crawl freely among water plants. It is probable that some are carnivorous, either attacking other larvae or subsisting on more minute forms of animal life; but others perhaps feed more exclusively on vegetable matters of a low type, such as diatoms.
The most aberrant type of larva is that of the genus Prosopistoma, which was originally described as an entomostracous crustacean on account of the presence of a large carapace overlapping the greater part of the body. The dorsal skeletal elements of the thorax and of the anterior six abdominal segments unite with the wing-cases to form a large respiratory chamber, containing five pairs of tracheal gills, with lateral slits for the inflow and a posterior orifice for the outflow of water. Species of this genus occur in Europe, Africa and Madagascar.
When the aquatic insect has reached its full growth it emerges from the water or seeks its surface; the thorax splits down the back and the winged form appears. But this is not yet perfect, although it has all the form of a perfect insect and is capable of flight; it is what is variously termed a “pseud-imago,” “sub-imago” or “pro-imago.” Contrary to the habits of all other insects, there yet remains a pellicle that has to be shed, covering every part of the body. This final moult is effected soon after the insect’s appearance in the winged form; the creature seeks a temporary resting-place, the pellicle splits down the back, and the now perfect insect comes forth, often differing very greatly in colours and markings from the condition in which it was only a few moments before. If the observer takes up a suitable position near water, his coat is often seen to be covered with the cast sub-imaginal skins of these insects, which had chosen him as a convenient object upon which to undergo their final change. In some few genera of very low type it appears probable that, at any rate in the female, this final change is never effected and that the creature dies a sub-imago.
The winged insect differs considerably in form from its sub-aquatic condition. The head is smaller, often occupied almost entirely above in the male by the very large eyes, which in some species are curiously double in that sex, one portion being pillared, and forming what is termed a “turban,” the mouth parts are aborted, for the creature is now incapable of taking nutriment either solid or fluid; the antennae are mere short bristles, consisting of two rather large basal joints and a multi-articulate thread. The prothorax is much narrowed, whereas the other segments (especially the mesothorax) are greatly enlarged; the legs long and slender, the anterior pair often very much longer in the male than in the female; the tarsi four- or five-jointed; but in some genera (e.g. Oligoneuria and allies) the legs are aborted, and the creatures are driven helplessly about by the wind. The wings are carried erect: the anterior pair large, with numerous longitudinal nervures, and usually abundant transverse reticulation; the posterior pair very much smaller, often lanceolate, and frequently wanting absolutely. The abdomen consists of ten segments; at the end are either two or three long multi-articulate tails; in the male the ninth joint bears forcipated appendages; in the female the oviducts terminate at the junction of the seventh and eighth ventral segments. The independent opening of the genital ducts and the absence of an ectodermal vagina and ejaculatory duct are remarkable archaic features of these insects, as has been pointed out by J. A. Palmén. The sexual act takes place in the air, and is of very short duration, but is apparently repeated several times, at any rate in some cases.
Ephemeridae are found all over the world, even up to high northern latitudes. F. J. Pictet, A. E. Eaton and others have 935 given us valuable works or monographs on the family; but the subject still remains little understood, partly owing to the great difficulty of preserving such delicate insects; and it appears probable they can only be satisfactorily investigated as moist preparations. The number of described species is less than 200, spread over many genera.
From the earliest times attention has been drawn to the enormous abundance of species of the family in certain localities. Johann Anton Scopoli, writing in the 18th century, speaks of them as so abundant in one place in Carniola that in June twenty cartloads were carried away for manure! Polymitarcys virgo, which, though not found in England, occurs in many parts of Europe (and is common at Paris), emerges from the water soon after sunset, and continues for several hours in such myriads as to resemble snow showers, putting out lights, and causing inconvenience to man, and annoyance to horses by entering their nostrils. In other parts of the world they have been recorded in multitudes that obscured passers-by on the other side of the street. And similar records might be multiplied almost to any extent. In Britain, although they are often very abundant, we have scarcely anything analogous.
Fish, as is well known, devour them greedily, and enjoy a veritable feast during the short period in which any particular species appears. By anglers the common English species of Ephemera (vulgata and danica, but more especially the latter, which is more abundant) is known as the “may-fly,” but the terms “green drake” and “bastard drake” are applied to conditions of the same species. Useful information on this point will be found in Ronalds’s Fly-Fisher’s Entomology, edited by Westwood.
Ephemeridae belong to a very ancient type of insects, and fossil imprints of allied forms occur even in the Devonian and Carboniferous formations.
There is much to be said in favour of the view entertained by some entomologists that the structural and developmental characteristics of may-flies are sufficiently peculiar to warrant the formation for them of a special order of insects, for which the names Agnatha, Plectoptera and Ephemeroptera have been proposed. (See Hexapoda, Neuroptera.)
Bibliography.—Of especial value to students of these insects are A. E. Eaton’s monograph (Trans. Linn. Soc. (2) iii. 1883-1885) and A. Vayssière’s “Recherches sur l’organisation des larves” (Ann. Sci. Nat. Zool. (6) xiii. 1882 (7) ix. 1890). J. A. Palmén’s memoirs Zur Morphologie des Tracheensystems (Leipzig, 1877) and Über paarige Ausführungsgänge der Geschlechtsorgane bei Insekten (Helsingfors, 1884), contain important observations on may-flies. See also L. C. Miall, Nat. Hist. Aquatic Insects (London, 1895); J. G. Needham and others (New York State Museum, Bull. 86, 1905).
MAYHEM (for derivation see Maiming), an old Anglo-French term of the law signifying an assault whereby the injured person is deprived of a member proper for his defence in fight, e.g. an arm, a leg, a fore tooth, &c. The loss of an ear, jaw tooth, &c., was not mayhem. The most ancient punishment in English law was retaliative—membrum pro membro, but ultimately at common law fine and imprisonment. Various statutes were passed aimed at the offence of maiming and disfiguring, which is now dealt with by section 18 of the Offences against the Person Act 1861. Mayhem may also be the ground of a civil action, which had this peculiarity that the court on sight of the wound might increase the damages awarded by the jury.
MAYHEW, HENRY (1812-1887), English author and journalist, son of a London solicitor, was born in 1812. He was sent to Westminster school, but ran away to sea. He sailed to India, and on his return studied law for a short time under his father. He began his journalistic career by founding, with Gilbert à Beckett, in 1831, a weekly paper, Figaro in London. This was followed in 1832 by a short-lived paper called The Thief; and he produced one or two successful farces. His brothers Horace (1816-1872) and Augustus Septimus (1826-1875) were also journalists, and with them Henry occasionally collaborated, notably with the younger in The Greatest Plague of Life (1847) and in Acting Charades (1850). In 1841 Henry Mayhew was one of the leading spirits in the foundation of Punch, of which he was for the first two years joint-editor with Mark Lemon. He afterwards wrote on all kinds of subjects, and published a number of volumes of no permanent reputation—humorous stories, travel and practical handbooks. He is credited with being the first to “write up” the poverty side of London life from a philanthropic point of view; with the collaboration of John Binny and others he published London Labour and London Poor (1851; completed 1864) and other works on social and economic questions. He died in London, on the 25th of July 1887. Horace Mayhew was for some years sub-editor of Punch, and was the author of several humorous publications and plays. The books of Horace and Augustus Mayhew owe their survival chiefly to Cruikshank’s illustrations.
MAYHEW, JONATHAN (1720-1766), American clergyman, was born at Martha’s Vineyard on the 8th of October 1720, being fifth in descent from Thomas Mayhew (1592-1682), an early settler and the grantee (1641) of Martha’s Vineyard. Thomas Mayhew (c. 1616-1657), the younger, his son John (d. 1689) and John’s son, Experience (1673-1758), were active missionaries among the Indians of Martha’s Vineyard and the vicinity. Jonathan, the son of Experience, graduated at Harvard in 1744. So liberal were his theological views that when he was to be ordained minister of the West Church in Boston in 1747 only two ministers attended the first council called for the ordination, and it was necessary to summon a second council. Mayhew’s preaching made his church practically the first “Unitarian” Congregational church in New England, though it was never officially Unitarian. In 1763 he published Observations on the Charter and Conduct of the Society for Propagating the Gospel in Foreign Parts, an attack on the policy of the society in sending missionaries to New England contrary to its original purpose of “Maintaining Ministers of the Gospel” in places “wholly destitute and unprovided with means for the maintenance of ministers and for the public worship of God;” the Observations marked him as a leader among those in New England who feared, as Mayhew said (1762), “that there is a scheme forming for sending a bishop into this part of the country, and that our Governor,1 a true churchman, is deeply in the plot.” To an American reply to the Observations, entitled A Candid Examination (1763), Mayhew wrote a Defense; and after the publication of an Answer, anonymously published in London in 1764 and written by Thomas Seeker, archbishop of Canterbury, he wrote a Second Defense. He bitterly opposed the Stamp Act, and urged the necessity of colonial union (or “communion”) to secure colonial liberties. He died on the 9th of July 1766. Mayhew was Dudleian lecturer at Harvard in 1765, and in 1749 had received the degree of D.D. from the University of Aberdeen.
See Alden Bradford, Memoir of the Life and Writings of Rev. Jonathan Mayhew (Boston, 1838), and “An Early Pulpit Champion of Colonial Rights,” chapter vi., in vol. i. of M. C. Tyler’s Literary History of the American Revolution (2 vols., New York, 1897).
1 Francis Bernard, whose project for a college at Northampton seemed to Mayhew and others a move to strengthen Anglicanism.
MAYHEW, THOMAS, English 18th century cabinet-maker. Mayhew was the less distinguished partner of William Ince (q.v.). The chief source of information as to his work is supplied by his own drawings in the volume of designs, The universal system of household furniture, which he published in collaboration with his partner. The name of the firm appears to have been Mayhew and Ince, but on the title page of this book the names are reversed, perhaps as an indication that Ince was the more extensive contributor. In the main Mayhew’s designs are heavy and clumsy, and often downright extravagant, but he had a certain lightness of accomplishment in his applications of the bizarre Chinese style. Of original talent he possessed little, yet it is certain that much of his Chinese work has been attributed to Chippendale. It is indeed often only by reference to books of design that the respective work of the English cabinet-makers of the second half of the 18th century can be correctly attributed.
MAYMYO, a hill sanatorium in India, in the Mandalay district of Upper Burma, 3500 ft. above the sea, with a station on the 936 Mandalay-Lashio railway 422 m. from Rangoon. Pop. (1901), 6223. It consists of an undulating plateau, surrounded by hills, which are covered with thin oak forest and bracken. Though not entirely free from malaria, it has been chosen for the summer residence of the lieutenant-governor; and it is also the permanent headquarters of the lieutenant-general commanding the Burma division, and of other officials.
MAYNARD, FRANÇOIS DE (1582-1646), French poet, was born at Toulouse in 1582. His father was conseiller in the parlement of the town, and François was also trained for the law, becoming eventually president of Aurillac. He became secretary to Margaret of Valois, wife of Henry IV., for whom his early poems are written. He was a disciple of Malherbe, who said that in the workmanship of his lines he excelled Racan, but lacked his rival’s energy. In 1634 he accompanied the Cardinal de Noailles to Rome and spent about two years in Italy. On his return to France he made many unsuccessful efforts to obtain the favour of Richelieu, but was obliged to retire to Toulouse. He never ceased to lament his exile from Paris and his inability to be present at the meetings of the Academy, of which he was one of the earliest members. The best of his poems is in imitation of Horace, “Alcippe, reviens dans nos bois.” He died at Toulouse on the 23rd of December 1646.
His works consist of odes, epigrams, songs and letters, and were published in 1646 by Marin le Roy de Gomberville.
MAYNE, JASPER (1604-1672), English author, was baptized at Hatherleigh, Devonshire, on the 23rd of November 1604. He was educated at Westminster School and at Christ Church, Oxford, where he had a distinguished career. He was presented to two college livings in Oxfordshire, and was made D.D. in 1646. During the Commonwealth he was dispossessed, and became chaplain to the duke of Devonshire. At the Restoration he was made canon of Christ Church, archdeacon of Chichester and chaplain in ordinary to the king. He wrote a farcical domestic comedy, The City Match (1639), which is reprinted in vol. xiii. of Hazlitt’s edition of Dodsley’s Old Plays, and a fantastic tragi-comedy entitled The Amorous War (printed 1648). After receiving ecclesiastical preferment he gave up poetry as unbefitting his profession. His other works comprise some occasional gems, a translation of Lucian’s Dialogues (printed 1664) and a number of sermons. He died on the 6th of December 1672 at Oxford.
MAYNOOTH, a small town of county Kildare, Ireland, on the Midland Great Western railway and the Royal Canal, 15 m. W. by N. of Dublin. Pop. (1901), 948. The Royal Catholic College of Maynooth, founded by an Act of the Irish parliament in 1795, is the chief seminary for the education of the Roman Catholic clergy of Ireland. The building is a fine Gothic structure by A. W. Pugin, erected by a parliamentary grant obtained in 1846. The chapel, with fine oak choir-stalls, mosaic pavements, marble altars and stained glass, and with adjoining cloisters, was dedicated in 1890. The average number of students is about 500—the number specified under the act of 1845—and the full course of instruction is eight years. Near the college stand the ruins of Maynooth Castle, probably built in 1176, but subsequently extended, and formerly the residence of the Fitzgerald family. It was besieged in the reigns of Henry VIII. and Edward VI., and during the Cromwellian Wars, when it was demolished. The beautiful mansion of Carton is about a mile from the town.
MAYO, RICHARD SOUTHWELL BOURKE, 6th Earl of (1822-1872), British statesman, son of Robert Bourke, the 5th earl (1797-1867), was born in Dublin on the 21st of February, 1822, and was educated at Trinity College, Dublin. After travelling in Russia he entered parliament, and sat successively for Kildare, Coleraine and Cockermouth. He was chief secretary for Ireland in three administrations, in 1852, 1858 and 1866, and was appointed viceroy of India in January 1869. He consolidated the frontiers of India and met Shere Ali, amir of Afghanistan, in durbar at Umballa in March 1869. His reorganization of the finances of the country put India on a paying basis; and he did much to promote irrigation, railways, forests and other useful public works. Visiting the convict settlement at Port Blair in the Andaman Islands, for the purpose of inspection, the viceroy was assassinated by a convict on the 8th of February 1872. His successor was his son, Dermot Robert Wyndham Bourke (b. 1851) who became 7th earl of Mayo.
See Sir W. W. Hunter, Life of the Earl of Mayo, (1876), and The Earl of Mayo in the Rulers of India Series (1891).
MAYO, a western county of Ireland, in the province of Connaught, bounded N. and W. by the Atlantic Ocean, N.E. by Sligo, E. by Roscommon, S.E. and S. by Galway. The area is 1,380,390 acres, or about 2157 sq. m., the county being the largest in Ireland after Cork and Galway. About two-thirds of the boundary of Mayo is formed by sea, and the coast is very much indented, and abounds in picturesque scenery. The principal inlets are Killary Harbour between Mayo and Galway; Clew Bay, in which are the harbours of Westport and Newport; Blacksod Bay and Broad Haven, which form the peninsula of the Mullet; and Killala Bay between Mayo and Sligo. The islands are very numerous, the principal being Inishturk, near Killary Harbour; Clare Island, at the mouth of Clew Bay, where there are many islets, all formed of drift; and Achill, the largest island off Ireland. The coast scenery is not surpassed by that of Donegal northward and Connemara southward, and there are several small coast-towns, among which may be named Killala on the north coast, Belmullet on the isthmus between Blacksod Bay and Broad Haven, Newport and Westport on Clew Bay, with the watering-place of Mallaranny. The majestic cliffs of the north coast, however, which reach an extreme height in Benwee Head (892 ft.), are difficult of access and rarely visited. In the eastern half of the county the surface is comparatively level, with occasional hills; the western half is mountainous. Mweelrea (2688 ft.) is included in a mountain range lying between Killary Harbour and Lough Mask. The next highest summits are Nephin (2646 ft.), to the west of Lough Conn, and Croagh Patrick (2510 ft.), to the south of Clew Bay. The river Moy flows northwards, forming part of the boundary of the county with Sligo, and falls into Killala Bay. The courses of the other streams are short, and except when swollen by rains their volume is small. The principal lakes are Lough Mask and Lough Corrib, on the borders of the county with Galway, and Loughs Conn in the east, Carrowmore in the north-west, Beltra in the west, and Carra adjoining Lough Mask. These loughs and the smaller loughs, with the streams generally, afford admirable sport with salmon, sea-trout and brown trout, and Ballina is a favourite centre.
Geology.—The wild and barren west of this county, including the great hills on Achill Island, is formed of “Dalradian” rocks, schists and quartzites, highly folded and metamorphosed, with intrusions of granite near Belmullet. At Blacksod Bay the granite has been quarried as an ornamental stone. Nephin Beg, Nephin and Croagh Patrick are typical quartzite summits, the last named belonging possibly to a Silurian horizon but rising from a metamorphosed area on the south side of Clew Bay. The schists and gneisses of the Ox Mountain axis also enter the county north of Castlebar. The Muilrea and Ben Gorm range, bounding the fine fjord of Killary Harbour, is formed of terraced Silurian rocks, from Bala to Ludlow age. These beds, with intercalated lavas, form the mountainous west shore of Lough Mask, the east, like that of Lough Corrib, being formed of low Carboniferous Limestone ground. Silurian rocks, with Old Red Sandstone over them, come out at the west end of the Curlew range at Ballaghaderreen. Clew Bay, with its islets capped by glacial drift, is a submerged part of a synclinal of Carboniferous strata, and Old Red Sandstone comes out on the north side of this, from near Achill to Lough Conn. The country from Lough Conn northward to the sea is a lowland of Carboniferous Limestone, with L. Carboniferous Sandstone against the Dalradian on the west.
Industries.—There are some very fertile regions in the level portions of the county, but in the mountainous districts the soil is poor, the holdings are subdivided beyond the possibility of affording proper sustenance to their occupiers, and, except where fishing is combined with agricultural operations, the circumstances of the peasantry are among the most wretched of any district of Ireland. The proportion of tillage to pasturage is roughly as 1 to 31⁄2. Oats and potatoes are the principal crops. Cattle, sheep, pigs and poultry are reared. Coarse linen and woollen cloths are manufactured to a small extent. At Foxford woollen-mills are established at a nunnery, in connexion with a scheme of technical instruction. Keel, Belmullet and Ballycastle are the headquarters of sea and 937 coast fishing districts, and Ballina of a salmon-fishing district, and these fisheries are of some value to the poor inhabitants. A branch of the Midland Great Western railway enters the county from Athlone, in the south-east, and runs north to Ballina and Killala on the coast, branches diverging from Claremorris to Ballinrobe, and from Manulla to Westport and Achill on the west coast. The Limerick and Sligo line of the Great Southern and Western passes from south to north-east by way of Claremorris.
Population and Administration.—The population was 218,698 in 1891, and 199,166 in 1901. The decrease of population and the number of emigrants are slightly below the average of the Irish counties. Of the total population about 97% are rural, and about the same percentage are Roman Catholics. The chief towns are Ballina (pop. 4505), Westport (3892) and Castlebar (3585), the county town. Ballaghaderreen, Claremorris (Clare), Crossmolina and Swineford are lesser market towns; and Newport and Westport are small seaports on Clew Bay. The county includes nine baronies. Assizes are held at Castlebar, and quarter sessions at Ballina, Ballinrobe, Belmullet, Castlebar, Claremorris, Swineford and Westport. In the Irish parliament two members were returned for the county, and two for the borough of Castlebar, but at the union Castlebar was disfranchised. The division since 1885 is into north, south, east and west parliamentary divisions, each returning one member. The county is in the Protestant diocese of Tuam and the Roman Catholic dioceses of Taum, Achonry, Galway and Kilmacduagh, and Killala.
History and Antiquities.—Erris in Mayo was the scene of the landing of the chief colony of the Firbolgs, and the battle which is said to have resulted in the overthrow and almost annihilation of this tribe took place also in this county, at Moytura near Cong. At the close of the 12th century what is now the county of Mayo was granted, with other lands, by king John to William, brother of Hubert de Burgh. After the murder of William de Burgh, 3rd earl of Ulster (1333), the Bourkes (de Burghs) of the collateral male line, rejecting the claim of William’s heiress (the wife of Lionel, son of King Edward III.) to the succession, succeeded in holding the bulk of the De Burgh possessions, what is now Mayo falling to the branch known by the name of “MacWilliam Oughter,” who maintained their virtual independence till the time of Elizabeth. Sir Henry Sydney, during his first viceroyalty, after making efforts to improve communications between Dublin and Connaught in 1566, arranged for the shiring of that province, and Mayo was made shire ground, taking its name from the monastery of Maio or Mageo, which was the seat of a bishop. Even after this period the MacWilliams continued to exercise very great authority, which was regularized in 1603, when “the MacWilliam Oughter,” Theobald Bourke, surrendered his lands and received them back, to hold them by English tenure, with the title of Viscount Mayo (see Burgh, De). Large confiscations of the estates in the county were made in 1586, and on the termination of the wars of 1641; and in 1666 the restoration of his estates to the 4th Viscount Mayo involved another confiscation, at the expense of Cromwell’s settlers. Killala was the scene of the landing of a French squadron in connexion with the rebellion of 1798. In 1879 the village of Knock in the south-east acquired notoriety from a story that the Virgin Mary had appeared in the church, which became the resort of many pilgrims.
There are round towers at Killala, Turlough, Meelick and Balla, and an imperfect one at Aughagower. Killala was formerly a bishopric. The monasteries were numerous, and many of them of considerable importance: the principal being those at Mayo, Ballyhaunis, Cong, Ballinrobe, Ballintober, Burrishoole, Cross or Holycross in the peninsula of Mullet, Moyne, Roserk or Rosserick and Templemore or Strade. Of the old castles the most notable are Carrigahooly near Newport, said to have been built by the celebrated Grace O’Malley, and Deel Castle near Ballina, at one time the residence of the earls of Arran.
See Hubert Thomas Knox, History of the County of Mayo (1908).
MAYOR, JOHN EYTON BICKERSTETH (1825- ), English classical scholar, was born at Baddegama, Ceylon, on the 28th of January 1825, and educated in England at Shrewsbury School and St John’s College, Cambridge. From 1863 to 1867 he was librarian of the university, and in 1872 succeeded H. A. J. Munro in the professorship of Latin. His best-known work, an edition of thirteen satires of Juvenal, is marked by an extraordinary wealth of illustrative quotations. His Bibliographical Clue to Latin Literature (1873), based on E. Hübner’s Grundriss zu Vorlesungen über die römische Litteraturgeschichte is a valuable aid to the student, and his edition of Cicero’s Second Philippic is widely used. He also edited the English works of J. Fisher, bishop of Rochester, i. (1876); Thomas Baker’s History of St John’s College, Cambridge (1869); Richard of Cirencester’s Speculum historiale de gestis regum Angliae 447-1066 (1863-1869); Roger Ascham’s Schoolmaster (new ed., 1883); the Latin Heptateuch (1889); and the Journal of Philology.
His brother, Joseph Bickersteth Mayor (1828- ), classical scholar and theologian, was educated at Rugby and St John’s College, Cambridge, and from 1870 to 1879 was professor of classics at King’s College, London. His most important classical works are an edition of Cicero’s De natura deorum (3 vols., 1880-1885) and Guide to the Choice of Classical Books (3rd ed., 1885, with supplement, 1896). He also devoted attention to theological literature and edited the epistles of St James (2nd ed., 1892), St Jude and St Peter (1907), and the Miscellanies of Clement of Alexandria (with F. J. A. Hort, 1902). From 1887 to 1893 he was editor of the Classical Review. His Chapters on English Metre (1886) reached a second edition in 1901.
MAYOR (Lat. major, greater), in modern times the title of a municipal officer who discharges judicial and administrative functions. The French form of the word is maire. In Germany the corresponding title is Bürgermeister, in Italy sindico, and in Spain alcalde. “Mayor” had originally a much wider significance. Among the nations which arose on the ruins of the Roman empire of the West, and which made use of the Latin spoken by their “Roman” subjects as their official and legal language, major and the Low Latin feminine majorissa were found to be very convenient terms to describe important officials of both sexes who had the superintendence of others. Any female servant or slave in the household of a barbarian, whose business it was to overlook other female servants or slaves, would be quite naturally called a majorissa. So the male officer who governed the king’s household would be the major domus. In the households of the Frankish kings of the Merovingian line, the major domus, who was also variously known as the gubernator, rector, moderator or praefectus palatii, was so great an officer that he ended by evicting his master. He was the “mayor of the palace” (q.v.). The fact that his office became hereditary in the family of Pippin of Heristal made the fortune of the Carolingian line. But besides the major domus (the major-domo), there were other officers who were majores, the major cubiculi, mayor of the bedchamber, and major equorum, mayor of the horse. In fact a word which could be applied so easily and with accuracy in so many circumstances was certain to be widely used by itself, or in its derivatives. The post-Augustine majorinus, “one of the larger kind,” was the origin of the medieval Spanish merinus, who in Castillian is the merino, and sometimes the merino mayor, or chief merino. He was a judicial and administrative officer of the king’s. The gregum merinus was the superintendent of the flocks of the corporation of sheep-owners called the mesta. From him the sheep, and then the wool, have come to be known as merinos—a word identical in origin with the municipal title of mayor. The latter came directly from the heads of gilds, and other associations of freemen, who had their banner and formed a group on the populations of the towns, the majores baneriae or vexilli.
In England the major is the modern representative of the lord’s bailiff or reeve (see Borough). We find the chief magistrate of London bearing the title of portreeve for considerably more than a century after the Conquest. This official was elected by popular choice, a privilege secured from king John. By the beginning of the 11th century the title of portreeve1 gave way to that of mayor as the designation of the chief officer of 938 London,2 and the adoption of the title by other boroughs followed at various intervals.
A mayor is now in England and America the official head of a municipal government. In the United Kingdom the Municipal Corporations Act, 1882, s. 15, regulates the election of mayors. He is to be a fit person elected annually on the 9th of November by the council of the borough from among the aldermen or councillors or persons qualified to be such. His term of office is one year, but he is eligible for re-election. He may appoint a deputy to act during illness or absence, and such deputy must be either an alderman or councillor. A mayor who is absent from the borough for more than two months becomes disqualified and vacates his office. A mayor is ex officio during his year of office and the next year a justice of the peace for the borough. He receives such remuneration as the council thinks reasonable. The office of mayor in an English borough does not entail any important administrative duties. It is generally regarded as an honour conferred for past services. The mayor is expected to devote much of his time to ornamental functions and to preside over meetings which have for their object the advancement of the public welfare. His administrative duties are merely to act as returning officer at municipal elections, and as chairman of the meetings of the council.
The position and power of an English mayor contrast very strongly with those of the similar official in the United States. The latter is elected directly by the voters within the city, usually for several years; and he has extensive administrative powers.
The English method of selecting a mayor by the council is followed for the corresponding functionaries in France (except Paris), the more important cities of Italy, and in Germany, where, however, the central government must confirm the choice of the council. Direct appointment by the central government exists in Belgium, Holland, Denmark, Norway, Sweden and the smaller towns of Italy and Spain. As a rule, too, the term of office is longer in other countries than in the United Kingdom. In France election is for four years, in Holland for six, in Belgium for an indefinite period, and in Germany usually for twelve years, but in some cases for life. In Germany the post may be said to be a professional one, the burgomaster being the head of the city magistracy, and requiring, in order to be eligible, a training in administration. German burgomasters are most frequently elected by promotion from another city. In France the maire, and a number of experienced members termed “adjuncts,” who assist him as an executive committee, are elected directly by the municipal council from among their own number. Most of the administrative work is left in the hands of the maire and his adjuncts, the full council meeting comparatively seldom. The maire and the adjuncts receive no salary.
Further information will be found in the sections on local government in the articles on the various countries; see also A. Shaw, Municipal Government in Continental Europe; J. A. Fairlie, Municipal Administration; S. and B. Webb, English Local Government; Redlich and Hirst, Local Government in England; A. L. Lowell, The Government of England.
1 If a place was of mercantile importance it was called a port (from porta, the city gate), and the reeve or bailiff, a “portreeve.”
2 The mayors of certain cities in the United Kingdom (London, York, Dublin) have acquired by prescription the prefix of “lord.” In the case of London it seems to date from 1540. It has also been conferred during the closing years of the 19th century by letters patent on other cities—Birmingham, Liverpool, Manchester, Bristol, Sheffield, Leeds, Cardiff, Bradford, Newcastle-on-Tyne, Belfast, Cork. In 1910 it was granted to Norwich. Lord mayors are entitled to be addressed as “right honourable.”
MAYOR OF THE PALACE.—The office of mayor of the palace was an institution peculiar to the Franks of the Merovingian period. A landowner who did not manage his own estate placed it in the hands of a steward (major), who superintended the working of the estate and collected its revenues. If he had several estates, he appointed a chief steward, who managed the whole of the estates and was called the major domus. Each great personage had a major domus—the queen had hers, the king his; and since the royal house was called the palace, this officer took the name of “mayor of the palace.” The mayor of the palace, however, did not remain restricted to domestic functions; he had the discipline of the palace and tried persons who resided there. Soon his functions expanded. If the king were a minor, the mayor of the palace supervised his education in the capacity of guardian (nutricius), and often also occupied himself with affairs of state. When the king came of age, the mayor exerted himself to keep this power, and succeeded. In the 7th century he became the head of the administration and a veritable prime minister. He took part in the nomination of the counts and dukes; in the king’s absence he presided over the royal tribunal; and he often commanded the armies. When the custom of commendation developed, the king charged the mayor of the palace to protect those who had commended themselves to him and to intervene at law on their behalf. The mayor of the palace thus found himself at the head of the commendati, just as he was at the head of the functionaries.
It is difficult to trace the names of some of the mayors of the palace, the post being of almost no significance in the time of Gregory of Tours. When the office increased in importance the mayors of the palace did not, as has been thought, pursue an identical policy. Some—for instance, Otto, the mayor of the palace of Austrasia towards 640—were devoted to the Crown. On the other hand, mayors like Flaochat (in Burgundy) and Erkinoald (in Neustria) stirred up the great nobles, who claimed the right to take part in their nomination, against the king. Others again, sought to exercise the power in their own name both against the king and against the great nobles—such as Ebroïn (in Neustria), and, later, the Carolingians Pippin II., Charles Martel, and Pippin III., who, after making use of the great nobles, kept the authority for themselves. In 751 Pippin III., fortified by his consultation with Pope Zacharias, could quite naturally exchange the title of mayor for that of king; and when he became king, he suppressed the title of mayor of the palace. It must be observed that from 639 there were generally separate mayors of Neustria, Austrasia and Burgundy, even when Austrasia and Burgundy formed a single kingdom; the mayor was a sign of the independence of the region. Each mayor, however, sought to supplant the others; the Pippins and Charles Martel succeeded, and their victory was at the same time the victory of Austrasia over Neustria and Burgundy.
See G. H. Pertz, Geschichte der merowingischen Hausmeier (Hanover, 1819); H. Bonnell, De dignitate majoris domus (Berlin, 1858); E. Hermann, Das Hausmeieramt, ein echt germanisches Amt, vol. ix. of Untersuchungen zur deutschen Staats- und Rechtsgeschichte, ed. by O. Gierke (Breslau, 1878, seq.); G. Waitz, Deutsche Verfassungsgeschichte, 3rd ed., revised by K. Zeumer; and Fustel de Coulanges, Histoire des institutions politiques de l’ancienne France: La monarchie franque (Paris, 1888).
MAYORUNA, a tribe of South American Indians of Panoan stock. Their country is between the Ucayali and Javari rivers, north-eastern Peru. They are a fine race, roaming the forests and living by hunting. They cut their hair in a line across the forehead and let it hang down their backs. Many have fair skins and beards, a peculiarity sometimes explained by their alleged descent from Ursua’s soldiers, but this theory is improbable. They are famous for the potency of their blow-gun poison.
MAYO-SMITH, RICHMOND (1854-1901), American economist, was born in Troy, Ohio, on the 9th of February 1854. Educated at Amherst, and at Berlin and Heidelberg, he became assistant professor of economics at Columbia University in 1877. He was an adjunct professor from 1878 to 1883, when he was appointed professor of political economy and social science, a post which he held until his death on the 11th of November 1901. He devoted himself especially to the study of statistics, and was recognized as one of the foremost authorities on the subject. His works include Emigration and Immigration (1890); Sociology and Statistics (1895), and Statistics and Economics (1899).
MAYOTTE, one of the Comoro Islands, in the Mozambique Channel between Madagascar and the African mainland. It has belonged to France since 1843 (see Comoro Islands).
MAYOW, JOHN (1643-1679), English chemist and physiologist, was born in London in May 1643. At the age of fifteen he went up to Wadham College, Oxford, of which he became a scholar a year later, and in 1660 he was elected to a fellowship at All Souls. He graduated in law (bachelor, 1665, doctor, 1670), but made medicine his profession, and “became noted for his practice therein, especially in the summer time, in the city of Bath.” In 1678, on the proposal of R. Hooke, he was chosen a fellow of the Royal Society. The following year, after a marriage which was “not altogether to his content,” he died in London in September 1679. He published at Oxford in 1668 two tracts, on respiration and rickets, and in 1674 these were reprinted, the former in an enlarged and corrected form, with three others “De sal-nitro et spiritu nitro-aereo,” “De respiratione foetus in 939 utero et ovo,” and “De motu musculari et spiritibus animalibus” as Tractatus quinque medico-physici. The contents of this work, which was several times republished and translated into Dutch, German and French, show him to have been an investigator much in advance of his time.
Accepting as proved by Boyle’s experiments that air is necessary for combustion, he showed that fire is supported not by the air as a whole but by a “more active and subtle part of it.” This part he called spiritus igneo-aereus, or sometimes nitro-aereus; for he identified it with one of the constituents of the acid portion of nitre which he regarded as formed by the union of fixed alkali with a spiritus acidus. In combustion the particulae nitro-aereae—either pre-existent in the thing consumed or supplied by the air—combined with the material burnt; as he inferred from his observation that antimony, strongly heated with a burning glass, undergoes an increase of weight which can be attributed to nothing else but these particles. In respiration he argued that the same particles are consumed, because he found that when a small animal and a lighted candle were placed in a closed vessel full of air the candle first went out and soon afterwards the animal died, but if there was no candle present it lived twice as long. He concluded that this constituent of the air is absolutely necessary for life, and supposed that the lungs separate it from the atmosphere and pass it into the blood. It is also necessary, he inferred, for all muscular movements, and he thought there was reason to believe that the sudden contraction of muscle is produced by its combination with other combustible (salino-sulphureous) particles in the body; hence the heart, being a muscle, ceases to beat when respiration is stopped. Animal heat also is due to the union of nitro-aerial particles, breathed in from the air, with the combustible particles in the blood, and is further formed by the combination of these two sets of particles in muscle during violent exertion. In effect, therefore, Mayow—who also gives a remarkably correct anatomical description of the mechanism of respiration—preceded Priestley and Lavoisier by a century in recognizing the existence of oxygen, under the guise of his spiritus nitro-aereus, as a separate entity distinct from the general mass of the air; he perceived the part it plays in combustion and in increasing the weight of the calces of metals as compared with metals themselves; and, rejecting the common notions of his time that the use of breathing is to cool the heart, or assist the passage of the blood from the right to the left side of the heart, or merely to agitate it, he saw in inspiration a mechanism for introducing oxygen into the body, where it is consumed for the production of heat and muscular activity, and even vaguely conceived of expiration as an excretory process.
MAYSVILLE, a city and the county-seat of Mason county, Kentucky, U.S.A., on the Ohio river, 60 m. by rail S.E. of Cincinnati. Pop. (1890) 5358; (1900) 6423 (1155 negroes); (1910) 6141. It is served by the Louisville & Nashville, and the Chesapeake & Ohio railways, and by steamboats on the Ohio river. Among its principal buildings are the Mason county public library (1878), the Federal building and Masonic and Odd Fellows’ temples. The city lies between the river and a range of hills; at the back of the hills is a fine farming country, of which tobacco of excellent quality is a leading product. There is a large plant of the American Tobacco Company at Maysville, and among the city’s manufactures are pulleys, ploughs, whisky, flour, lumber, furniture, carriages, cigars, foundry and machine-shop products, bricks and cotton goods. The city is a distributing point for coal and other products brought to it by Ohio river boats. Formerly it was one of the principal hemp markets of the country. The place early became a landing point for immigrants to Kentucky, and in 1784 a double log cabin and a blockhouse were erected here. It was then called Limestone, from the creek which flows into the Ohio here, but several years later the present name was adopted in honour of John May, who with Simon Kenton laid out the town in 1787, and who in 1790 was killed by the Indians. Maysville was incorporated as a town in 1787, was chartered as a city in 1833, and became the county-seat in 1848.
In 1830, when the question of “internal improvements” by the National government was an important political issue, Congress passed a bill directing the government to aid in building a turnpike road from Maysville to Lexington. President Andrew Jackson vetoed the bill on the ground that the proposed improvement was a local rather than a national one; but one-half the capital was then furnished privately, the other half was furnished through several state appropriations, and the road was completed in 1835 and marked the beginning of a system of turnpike roads built with state aid.
MAZAGAN (El Jadīda), a port on the Atlantic coast of Morocco in 33° 16′ N. 8° 26′ W. Pop. (1908), about 12,000, of whom a fourth are Jews and some 400 Europeans. It is the port for Marrákesh, from which it is 110 m. nearly due north, and also for the fertile province of Dukálla. Mazagan presents from the sea a very un-Moorish appearance; it has massive Portuguese walls of hewn stone. The exports, which include beans, almonds, maize, chick-peas, wool, hides, wax, eggs, &c., were valued at £360,000 in 1900, £364,000 in 1904, and £248,000 in 1906. The imports (cotton goods, sugar, tea, rice, &c.) were valued at £280,000 in 1900, £286,000 in 1904, and £320,000 in 1906. About 46% of the trade is with Great Britain and 34% with France. Mazagan was built in 1506 by the Portuguese, who abandoned it to the Moors in 1769 and established a colony, New Mazagan, on the shores of Para in Brazil.
See A. H. Dyé, “Les ports du Maroc” in Bull. Soc. Geog. Comm. Paris, xxx. 325-332 (1908), and British consular reports.
MAZAMET, an industrial town of south-western France in the department of Tarn, 41 m. S.S.E. of Albi by rail. Pop. (1906), town, 11,370; commune, 14,386. Mazamet is situated on the northern slope of the Montagnes Noires and on the Arnette, a small sub-tributary of the Agout. Numerous establishments are employed in wool-spinning and in the manufacture of “swan-skins” and flannels, and clothing for troops, and hosiery, and there are important tanneries and leather-dressing, glove and dye works. Extensive commerce is carried on in wool and raw hides from Argentina, Australia and Cape Colony.
MAZANDARAN, a province of northern Persia, lying between the Caspian Sea and the Elburz range, and bounded E. and W. by the provinces of Astarabad and Gilan respectively, 220 m. in length and 60 m. in (mean) breadth, with an area of about 10,000 sq. m. and a population estimated at from 150,000 to 200,000. Mazandaran comprises two distinct natural regions presenting the sharpest contrasts in their relief, climate and products. In the north the Caspian is encircled by the level and swampy lowlands, varying in breadth from 10 to 30 m., partly under impenetrable jungle, partly under rice, cotton, sugar and other crops. This section is fringed northwards by the sandy beach of the Caspian, here almost destitute of natural harbours, and rises somewhat abruptly inland to the second section, comprising the northern slopes and spurs of the Elburz, which approach at some points within 1 or 2 m. of the sea, and are almost everywhere covered with dense forest. The lowlands, rising but a few feet above the Caspian, and subject to frequent floodings, are extremely malarious, while the highlands, culminating with the magnificent Demavend (19,400 ft.), enjoy a tolerably healthy climate. But the climate, generally hot and moist in summer, is everywhere capricious and liable to sudden changes of temperature, whence the prevalence of rheumatism, dropsy and especially ophthalmia, noticed by all travellers. Snow falls heavily in the uplands, where it often lies for weeks on the ground. The direction of the long sandbanks at the river mouths, which project with remarkable uniformity from west to east, shows that the prevailing winds blow from the west and north-west. The rivers themselves, of which there are as many as fifty, are little more than mountain torrents, all rising on the northern slopes of Elburz, flowing mostly in independent channels to the Caspian, and subject to sudden freshets and inundations along their lower course. The chief are the Sardab-rud, Chalus, Herhaz (Lar in its upper course), Babul, Tejen and Nika, and all are well stocked with trout, salmon (azad-mahi), perch (safid-mahi), carp (kupur), bream (subulu), sturgeon (sag-mahi) and other fish, which with rice form the staple food of the inhabitants; the sturgeon supplies the caviare for the Russian market. Near their mouths the rivers, running counter to the prevailing winds and waves of the Caspian, form long sand-hills 20 to 30 ft. high and about 200 yds. broad, behind which are developed the so-called múrd-áb, or “dead waters,” stagnant pools and swamps characteristic of this coast, and a main cause of its unhealthiness.
The chief products are rice, cotton, sugar, a little silk, and fruits in great variety, including several kinds of the orange, lemon and citron. Some of the slopes are covered with extensive thickets of the pomegranate, and the wild vine climbs to a great height round the trunks of the forest trees. These woodlands 940 are haunted by the tiger, panther, bear, wolf and wild boar in considerable numbers. Of the domestic animals, all remarkable for their small size, the chief are the black, humped cattle somewhat resembling the Indian variety, and sheep and goats.
Kinneir, Fraser and other observers speak unfavourably of the Mazandarani people, whom they describe as very ignorant and bigoted, arrogant, rudely inquisitive and almost insolent towards strangers. The peasantry, however, are far from dull, and betray much shrewdness where their interests are concerned. In the healthy districts they are stout and well made, and are considered a warlike race, furnishing some cavalry (800 men) and eight battalions of infantry (5600 men) to government. They speak a marked Persian dialect, but a Tūrki idiom closely akin to the Turkoman is still current amongst the tribes, although they have mostly already passed from the nomad to the settled state. Of these tribes the most numerous are the Modaunlū, Khojehvand and Abdul Maleki, originally of Lek or Kurd stock, besides branches of the royal Afshār and Kājār tribes of Tūrki descent. All these are exempt from taxes in consideration of their military service.
The export trade is chiefly with Russia from Meshed-i-Sar, the principal port of the province, to Baku, where European goods are taken in exchange for the white and coloured calicoes, caviare, rice, fruits and raw cotton of Mazandarān. Great quantities of rice are also exported to the interior of Persia, principally to Teheran and Kazvin. Owing to the almost impenetrable character of the country there are scarcely any roads accessible to wheeled carriages, and the great causeway of Shah Abbas along the coast has in many places even disappeared under the jungle. Two routes, however, lead to Teheran, one by Firuz Kuh, 180 m. long, the other by Larijan, 144 m. long, both in tolerably good repair. Except where crossed by these routes the Elburz forms an almost impassable barrier to the south.
The administration is in the hands of a governor, who appoints the sub-governors of the nine districts of Amol, Barfarush, Meshed-i-Sar, Sari, Ashref, Farah-abad, Tunakabun, Kelarrustak and Kujur into which the province is divided. There is fair security for life and property; and, although otherwise indifferently administered, the country is quite free from marauders; but local disturbances have latterly been frequent in the two last-named districts. The revenue is about £30,000, of which little goes to the state treasury, most being required for the governors, troops and pensions. The capital is Sari, the other chief towns being Barfarush, Meshed-i-Sar, Ashref and Farah-abad.
MAZARIN, JULES (1602-1661), French cardinal and statesman, elder son of a Sicilian, Pietro Mazarini, the intendant of the household of Philip Colonna, and of his wife Ortensia Buffalini, a connexion of the Colonnas, was born at Piscina in the Abruzzi on the 14th of July 1602. He was educated by the Jesuits at Rome till his seventeenth year, when he accompanied Jerome Colonna as chamberlain to the university of Alcala in Spain. There he distinguished himself more by his love of gambling and his gallant adventures than by study, but made himself a thorough master, not only of the Spanish language and character, but also of that romantic fashion of Spanish love-making which was to help him greatly in after life, when he became the servant of a Spanish queen. On his return to Rome, about 1622, he took his degree as Doctor utriusque juris, and then became captain of infantry in the regiment of Colonna, which took part in the war in the Valtelline. During this war he gave proofs of much diplomatic ability, and Pope Urban VIII. entrusted him, in 1629, with the difficult task of putting an end to the war of the Mantuan succession. His success marked him out for further distinction. He was presented to two canonries in the churches of St John Lateran and Sta Maria Maggiore, although he had only taken the minor orders, and had never been consecrated priest; he negotiated the treaty of Turin between France and Savoy in 1632, became vice-legate at Avignon in 1634, and nuncio at the court of France from 1634 to 1636. But he began to wish for a wider sphere than papal negotiations, and, seeing that he had no chance of becoming a cardinal except by the aid of some great power, he accepted Richelieu’s offer of entering the service of the king of France, and in 1639 became a naturalized Frenchman.
In 1640 Richelieu sent him to Savoy, where the regency of Christine, the duchess of Savoy, and sister of Louis XIII., was disputed by her brothers-in-law, the princes Maurice and Thomas of Savoy, and he succeeded not only in firmly establishing Christine but in winning over the princes to France. This great service was rewarded by his promotion to the rank of cardinal on the presentation of the king of France in December 1641. On the 4th of December 1642 Cardinal Richelieu died, and on the very next day the king sent a circular letter to all officials ordering them to send in their reports to Cardinal Mazarin, as they had formerly done to Cardinal Richelieu. Mazarin was thus acknowledged supreme minister, but he still had a difficult part to play. The king evidently could not live long, and to preserve power he must make himself necessary to the queen, who would then be regent, and do this without arousing the suspicions of the king or the distrust of the queen. His measures were ably taken, and when the king died, on the 14th of May 1643, to everyone’s surprise her husband’s minister remained the queen’s. The king had by a royal edict cumbered the queen-regent with a council and other restrictions, and it was necessary to get the parlement of Paris to overrule the edict and make the queen absolute regent, which was done with the greatest complaisance. Now that the queen was all-powerful, it was expected she would at once dismiss Mazarin and summon her own friends to power. One of them, Potier, bishop of Beauvais, already gave himself airs as prime minister, but Mazarin had had the address to touch both the queen’s heart by his Spanish gallantry and her desire for her son’s glory by his skilful policy abroad, and he found himself able easily to overthrow the clique of Importants, as they were called. That skilful policy was shown in every arena on which the great Thirty Years’ War was being fought out. Mazarin had inherited the policy of France during the Thirty Years’ War from Richelieu. He had inherited his desire for the humiliation of the house of Austria in both its branches, his desire to push the French frontier to the Rhine and maintain a counterpoise of German states against Austria, his alliances with the Netherlands and with Sweden, and his four theatres of war—on the Rhine, in Flanders, in Italy and in Catalonia.
During the last five years of the great war it was Mazarin alone who directed the French diplomacy of the period. He it was who made the peace of Brömsebro between the Danes and the Swedes, and turned the latter once again against the empire; he it was who sent Lionne to make the peace of Castro, and combine the princes of North Italy against the Spaniards, and who made the peace of Ulm between France and Bavaria, thus detaching the emperor’s best ally. He made one fatal mistake—he dreamt of the French frontier being the Rhine and the Scheldt, and that a Spanish princess might bring the Spanish Netherlands as dowry to Louis XIV. This roused the jealousy of the United Provinces, and they made a separate peace with Spain in January 1648; but the valour of the French generals made the skill of the Spanish diplomatists of no avail, for Turenne’s victory at Zusmarshausen, and Condé’s at Lens, caused the peace of Westphalia to be definitely signed in October 1648. This celebrated treaty belongs rather to the history of Germany than to a life of Mazarin; but two questions have been often asked, whether Mazarin did not delay the peace as long as possible in order to more completely ruin Germany, and whether Richelieu would have made a similar peace. To the first question Mazarin’s letters, published by M. Chéruel, prove a complete negative, for in them appears the zeal of Mazarin for the peace. On the second point, Richelieu’s letters in many places indicate that his treatment of the great question of frontier would have been more thorough, but then he would not have been hampered in France itself.
At home Mazarin’s policy lacked the strength of Richelieu’s. The Frondes were largely due to his own fault. The arrest of Broussel threw the people on the side of the parlement. His avarice and unscrupulous plundering of the revenues of the realm, the enormous fortune which he thus amassed, his supple ways, his nepotism, and the general lack of public interest in the great foreign policy of Richelieu, made Mazarin the especial object of hatred both by bourgeois and nobles. The irritation of the latter was greatly Mazarin’s own fault; he had tried consistently to play off the king’s brother Gaston of Orleans against Condé, and their respective followers against each other, and had also, as his carnets prove, jealously kept any courtier from getting into the good graces of the queen-regent except by his means, so 941 that it was not unnatural that the nobility should hate him, while the queen found herself surrounded by his creatures alone. Events followed each other quickly; the day of the barricades was followed by the peace of Ruel, the peace of Ruel by the arrest of the princes, by the battle of Rethel, and Mazarin’s exile to Brühl before the union of the two Frondes. It was while in exile at Brühl that Mazarin saw the mistake he had made in isolating himself and the queen, and that his policy of balancing every party in the state against each other had made every party distrust him. So by his counsel the queen, while nominally in league with De Retz and the parliamentary Fronde, laboured to form a purely royal party, wearied by civil dissensions, who should act for her and her son’s interest alone, under the leadership of Mathieu Molé, the famous premier president of the parlement of Paris. The new party grew in strength, and in January 1652, after exactly a year’s absence, Mazarin returned to the court. Turenne had now become the royal general, and out-manœuvred Condé, while the royal party at last grew to such strength in Paris that Condé had to leave the capital and France. In order to promote a reconciliation with the parlement of Paris Mazarin had again retired from court, this time to Sedan, in August 1652, but he returned finally in February 1653. Long had been the trial, and greatly had Mazarin been to blame in allowing the Frondes to come into existence, but he had retrieved his position by founding that great royal party which steadily grew until Louis XIV. could fairly have said “L’État, c’est moi.” As the war had progressed, Mazarin had steadily followed Richelieu’s policy of weakening the nobles on their country estates. Whenever he had an opportunity he destroyed a feudal castle, and by destroying the towers which commanded nearly every town in France, he freed such towns as Bourges, for instance, from their long practical subjection to the neighbouring great lord.
The Fronde over, Mazarin had to build up afresh the power of France at home and abroad. It is to his shame that he did so little at home. Beyond destroying the brick-and-mortar remains of feudalism, he did nothing for the people. But abroad his policy was everywhere successful, and opened the way for the policy of Louis XIV. He at first, by means of an alliance with Cromwell, recovered the north-western cities of France, though at the price of yielding Dunkirk to the Protector. On the Baltic, France guaranteed the Treaty of Oliva between her old allies Sweden, Poland and Brandenburg, which preserved her influence in that quarter. In Germany he, through Hugues de Lionne, formed the league of the Rhine, by which the states along the Rhine bound themselves under the headship of France to be on their guard against the house of Austria. By such measures Spain was induced to sue for peace, which was finally signed in the Isle of Pheasants on the Bidassoa, and is known as the Treaty of the Pyrenees. By it Spain recovered Franche Comté, but ceded to France Roussillon, and much of French Flanders; and, what was of greater ultimate importance to Europe, Louis XIV. was to marry a Spanish princess, who was to renounce her claims to the Spanish succession if her dowry was paid, which Mazarin knew could not happen at present from the emptiness of the Spanish exchequer. He returned to Paris in declining health, and did not long survive the unhealthy sojourn on the Bidassoa; after some political instruction to his young master he passed away at Vincennes on the 9th of March 1661, leaving a fortune estimated at from 18 to 40 million livres behind him, and his nieces married into the greatest families of France and Italy.
The man who could have had such success, who could have made the Treaties of Westphalia and the Pyrenees, who could have weathered the storm of the Fronde, and left France at peace with itself and with Europe to Louis XIV., must have been a great man; and historians, relying too much on the brilliant memoirs of his adversaries, like De Retz, are apt to rank him too low. That he had many a petty fault there can be no doubt; that he was avaricious and double-dealing was also undoubted; and his carnets show to what unworthy means he had recourse to maintain his influence over the queen. What that influence was will be always debated, but both his carnets and the Brühl letters show that a real personal affection, amounting to passion on the queen’s part, existed. Whether they were ever married may be doubted; but that hypothesis is made more possible by M. Chéruel’s having been able to prove from Mazarin’s letters that the cardinal himself had never taken more than the minor orders, which could always be thrown off. With regard to France he played a more patriotic part than Condé or Turenne, for he never treated with the Spaniards, and his letters show that in the midst of his difficulties he followed with intense eagerness every movement on the frontiers. It is that immense mass of letters that prove the real greatness of the statesman, and disprove De Retz’s portrait, which is carefully arranged to show off his enemy against the might of Richelieu. To concede that the master was the greater man and the greater statesman does not imply that Mazarin was but a foil to his predecessor. It is true that we find none of those deep plans for the internal prosperity of France which shine through Richelieu’s policy. Mazarin was not a Frenchman, but a citizen of the world, and always paid most attention to foreign affairs; in his letters all that could teach a diplomatist is to be found, broad general views of policy, minute details carefully elaborated, keen insight into men’s characters, cunning directions when to dissimulate or when to be frank. Italian though he was by birth, education and nature, France owed him a great debt for his skilful management during the early years of Louis XIV., and the king owed him yet more, for he had not only transmitted to him a nation at peace, but had educated for him his great servants Le Tellier, Lionne and Colbert. Literary men owed him also much; not only did he throw his famous library open to them, but he pensioned all their leaders, including Descartes, Vincent Voiture (1598-1648), Jean Louis Guez de Balzac (1597-1654) and Pierre Corneille. The last-named applied, with an adroit allusion to his birthplace, in the dedication of his Pompée, the line of Virgil:—
“Tu regere imperio populos, Romane, memento.”
Authorities.—All the earlier works on Mazarin, and early accounts of his administration, of which the best were Bazin’s Histoire de France sous Louis XIII. et sous le Cardinal Mazarin, 4 vols. (1846), and Saint-Aulaire’s Histoire de la Fronde, have been superseded by P. A. Chéruel’s admirable Histoire de France pendant la minorité de Louis XIV., 4 vols. (1879-1880), which covers from 1643-1651, and its sequel Histoire de France sous le ministère de Cardinal Mazarin, 2 vols. (1881-1882), which is the first account of the period written by one able to sift the statements of De Retz and the memoir writers, and rest upon such documents as Mazarin’s letters and carnets. Mazarin’s Lettres, which must be carefully studied by any student of the history of France, have appeared in the Collection des documents inédits, 9 vols. For his carnets reference must be made to V. Cousin’s articles in the Journal des Savants, and Chéruel in Revue historique (1877), see also Chéruel’s Histoire de France pendant la minorité, &c., app. to vol. iii.; for his early life to Cousin’s Jeunesse de Mazarin (1865) and for the careers of his nieces to Renée’s Les Nièces de Mazarin (1856). For the Mazarinades or squibs written against him in Paris during the Fronde, see C. Moreau’s Bibliographie des mazarinades (1850), containing an account of 4082 Mazarinades. See also A. Hassall, Mazarin (1903).
MAZAR-I-SHARIF, a town of Afghanistan, the capital of the province of Afghan Turkestan. Owing to the importance of the military cantonment of Takhtapul, and its religious sanctity, it has long ago supplanted the more ancient capital of Balkh. It is situated in a malarious, almost desert plain, 9 m. E. of Balkh, and 30 m. S. of the Pata Kesar ferry on the Oxus river. In this neighbourhood is concentrated most of the Afghan army north of the Hindu Kush mountains, the fortified cantonment of Dehdadi having been completed by Sirdar Ghulam Ali Khan and incorporated with Mazar. Mazar-i-Sharif also contains a celebrated mosque, from which the town takes its name. It is a huge ornate building with minarets and a lofty cupola faced with shining blue tiles. It was built by Sultan Ali Mirza about A.D. 1420, and is held in great veneration by all Mussulmans, and especially by Shiites, because it is supposed to be the tomb of Ali, the son-in-law of Mahomet.
MAZARRÓN, a town of eastern Spain, in the province of Murcia, 19 m. W. of Cartagena. Pop. (1900), 23,284. There are soap and flour mills and metallurgic factories in the town, and iron, copper and lead mines in the neighbouring Sierra de Almenara. A railway 5 m. long unites Mazarron to its port on the Mediterranean, where there is a suburb with 2500 inhabitants (mostly engaged in fisheries and coasting trade), containing barracks, a custom-house, and important leadworks. Outside of the suburb there are saltpans, most of the proceeds of which are exported to Galicia.
MAZATLÁN, a city and port of the state of Sinaloa, Mexico, 120 m. (direct) W.S.W. of the city of Durango, in lat. 23° 12′ N., long 106° 24′ W. Pop. (1895), 15,852; (1900), 17,852. It is 942 the Pacific coast terminus of the International railway which crosses northern Mexico from Ciudad Porfirio Diaz, and a port of call for the principal steamship lines on this coast. The harbour is spacious, but the entrance is obstructed by a bar. The city is built on a small peninsula. Its public buildings include a fine town-hall, chamber of commerce, a custom-house and two hospitals, besides which there is a nautical school and a meteorological station, one of the first established in Mexico. The harbour is provided with a sea-wall at Olas Altas. A government wireless telegraph service is maintained between Mazatlán and La Paz, Lower California. Among the manufactures are saw-mills, foundries, cotton factories and ropeworks, and the exports are chiefly hides, ixtle, dried and salted fish, gold, silver and copper (bars and ores), fruit, rubber, tortoise-shell, and gums and resins.
MAZE, a network of winding paths, a labyrinth (q.v.). The word means properly a state of confusion or wonder, and is probably of Scandinavian origin; cf. Norw. mas, exhausting labour, also chatter, masa, to be busy, also to worry, annoy; Swed. masa, to lounge, move slowly and lazily, to dream, muse. Skeat (Etym. Dict.) takes the original sense to be probably “to be lost in thought,” “to dream,” and connects with the root ma-man-, to think, cf. “mind,” “man,” &c. The word “maze” represents the addition of an intensive suffix.
MAZEPA-KOLEDINSKY, IVAN STEPANOVICH (1644?-1709), hetman of the Cossacks, belonging to a noble Orthodox family, was born possibly at Mazeptsina, either in 1629 or 1644, the latter being the more probable date. He was educated at the court of the Polish king, John Casimir, and completed his studies abroad. An intrigue with a Polish married lady forced him to fly into the Ukraine. There is a trustworthy tradition that the infuriated husband tied the naked youth to the back of a wild horse and sent him forth into the steppe. He was rescued and cared for by the Dnieperian Cossacks, and speedily became one of their ablest leaders. In 1687, during a visit to Moscow, he won the favour of the then all-powerful Vasily Golitsuin, from whom he virtually purchased the hetmanship of the Cossacks (July 25). He took a very active part in the Azov campaigns of Peter the Great and won the entire confidence of the young tsar by his zeal and energy. He was also very serviceable to Peter at the beginning of the Great Northern War, especially in 1705 and 1706, when he took part in the Volhynian campaign and helped to construct the fortress of Pechersk. The power and influence of Mazepa were fully recognized by Peter the Great. No other Cossack hetman had ever been treated with such deference at Moscow. He ranked with the highest dignitaries in the state; he sat at the tsar’s own table. He had been made one of the first cavaliers of the newly established order of St Andrew, and Augustus of Poland had bestowed upon him, at Peter’s earnest solicitation, the universally coveted order of the White Eagle. Mazepa had no temptations to be anything but loyal, and loyal he would doubtless have remained had not Charles XII. crossed the Russian frontier. Then it was that Mazepa, who had had doubts of the issue of the struggle all along, made up his mind that Charles, not Peter, was going to win, and that it was high time he looked after his own interests. Besides, he had his personal grievances against the tsar. He did not like the new ways because they interfered with his old ones. He was very jealous of the favourite (Menshikov), whom he suspected of a design to supplant him. But he proceeded very cautiously. Indeed, he would have preferred to remain neutral, but he was not strong enough to stand alone. The crisis came when Peter ordered him to co-operate actively with the Russian forces in the Ukraine. At this very time he was in communication with Charles’s first minister, Count Piper, and had agreed to harbour the Swedes in the Ukraine and close it against the Russians (Oct. 1708). The last doubt disappeared when Menshikov was sent to supervise Mazepa. At the approach of his rival the old hetman hastened to the Swedish outposts at Horki, in Severia. Mazepa’s treason took Peter completely by surprise. He instantly commanded Menshikov to get a new hetman elected and raze Baturin, Mazepa’s chief stronghold in the Ukraine, to the ground. When Charles, a week later, passed Baturin by, all that remained of the Cossack capital was a heap of smouldering mills and ruined houses. The total destruction of Baturin, almost in sight of the Swedes, overawed the bulk of the Cossacks into obedience, and Mazepa’s ancient prestige was ruined in a day when the metropolitan of Kiev solemnly excommunicated him from the high altar, and his effigy, after being dragged with contumely through the mud at Kiev, was publicly burnt by the common hangman. Henceforth Mazepa, perforce, attached himself to Charles. What part he took at the battle of Poltava is not quite clear. After the catastrophe he accompanied Charles to Turkey with some 1500 horsemen (the miserable remnant of his 80,000 warriors). The sultan refused to surrender him to the tsar, though Peter offered 300,000 ducats for his head. He died at Bender on the 22nd of August 1709.
See N. I. Kostomarov, Mazepa and the Mazepanites (Russ.) (St Petersburg), 1885; R. Nisbet Bain, The First Romanovs (London, 1905); S. M. Solovev, History of Russia (Russ.), vol. xv. (St Petersburg, 1895).
MAZER, the name of a special type of drinking vessel, properly made of maple-wood, and so-called from the spotted or “birds-eye” marking on the wood (Ger. Maser, spot, marking, especially on wood; cf. “measles”). These drinking vessels are shallow bowls without handles, with a broad flat foot and a knob or boss in the centre of the inside, known technically as the “print.” They were made from the 13th to the 16th centuries, and were the most prized of the various wooden cups in use, and so were ornamented with a rim of precious metal, generally of silver or silver gilt; the foot and the “print” being also of metal. The depth of the mazers seems to have decreased in course of time, those of the 16th century that survive being much shallower than the earlier examples. There are examples with wooden covers with a metal handle, such as the Flemish and German mazers in the Franks Bequest in the British Museum. On the metal rim is usually an inscription, religious or bacchanalian, and the “print” was also often decorated. The later mazers sometimes had metal straps between the rim and the foot.
A very fine mazer with silver gilt ornamentation 3 in. deep and 91⁄2 in. in diameter was sold in the Braikenridge collection in 1908 for £2300. It bears the London hall-mark of 1534. This example is illustrated in the article Plate: see also Drinking Vessels.
MAZURKA (Polish for a woman of the province of Mazovia), a lively dance, originating in Poland, somewhat resembling the polka.It is danced in couples, the music being in 3⁄8 or 3⁄4 time.
MAZZARA DEL VALLO, a town of Sicily, in the province of Trapani, on the south-west coast of the island, 32 m. by rail S. of Trapani. Pop. (1901), 20,130. It is the seat of a bishop; the cathedral, founded in 1093, was rebuilt in the 17th century. The castle, at the south-eastern angle of the town walls, was erected in 1073. The mouth of the river, which bears the same name, serves as a port for small ships only. Mazzara was in origin a colony of Selinus: it was destroyed in 409, but it is mentioned again as a Carthaginian fortress in the First Punic War and as a post station on the Roman coast road, though whether it had municipal rights is doubtful.1 A few inscriptions of the imperial period exist, but no other remains of importance. On the west bank of the river are grottoes cut in the rock, of uncertain date: and there are quarries in the neighbourhood resembling those of Syracuse, but on a smaller scale.
See A. Castiglione, Sulle cose antiche della città di Mazzara (Alcamo, 1878).
1 Th. Mommsen in Corpus inscr. lat. (Berlin, 1883), x. 739.
MAZZINI, GIUSEPPE (1805-1872), Italian patriot, was born on the 22nd of June 1805 at Genoa, where his father, Giacomo Mazzini, was a physician in good practice, and a professor in the university. His mother is described as having been a woman of great personal beauty, as well as of active intellect and strong affections. During infancy and childhood his health was extremely delicate, and it appears that he was nearly six years of age before he was quite able to walk; but he had already begun to devour books of all kinds and to show other signs of great intellectual precocity. He studied Latin with his first tutor, 943 an old priest, but no one directed his extensive course of reading. He became a student at the university of Genoa at an unusually early age, and intended to follow his father’s profession, but being unable to conquer his horror of practical anatomy, he decided to graduate in law (1826). His exceptional abilities, together with his remarkable generosity, kindness and loftiness of character, endeared him to his fellow students. As to his inner life during this period, we have only one brief but significant sentence; “for a short time,” he says, “my mind was somewhat tainted by the doctrines of the foreign materialistic school; but the study of history and the intuitions of conscience—the only tests of truth—soon led me back to the spiritualism of our Italian fathers.”
The natural bent of his genius was towards literature, and, in the course of the four years of his nominal connexion with the legal profession, he wrote a considerable number of essays and reviews, some of which have been wholly or partially reproduced in the critical and literary volumes of his Life and Writings. His first essay, characteristically enough on “Dante’s Love of Country,” was sent to the editor of the Antologia fiorentina in 1826, but did not appear until some years afterwards in the Subalpino. He was an ardent supporter of romanticism as against what he called “literary servitude under the name of classicism”; and in this interest all his critiques (as, for example, that of Giannoni’s “Exile” in the Indicatore Livornese, 1829) were penned. But in the meantime the “republican instincts” which he tells us he had inherited from his mother had been developing, and his sense of the evils under which Italy was groaning had been intensified; and at the same time he became possessed with the idea that Italians, and he himself in particular, “could and therefore ought to struggle for liberty of country.” Therefore, he at once put aside his dearest ambition, that of producing a complete history of religion, developing his scheme of a new theology uniting the spiritual with the practical life, and devoted himself to political thought. His literary articles accordingly became more and more suggestive of advanced liberalism in politics, and led to the suppression by government of the Indicatore Genovese and the Indicatore Livornese successively. Having joined the Carbonari, he soon rose to one of the higher grades in their hierarchy, and was entrusted with a special secret mission into Tuscany; but, as his acquaintance grew, his dissatisfaction with the organization of the society increased, and he was already meditating the formation of a new association stripped of foolish mysterious and theatrical formulae, which instead of merely combating existing authorities should have a definite and purely patriotic aim, when shortly after the French revolution of 1830 he was betrayed, while initiating a new member, to the Piedmontese authorities. He was imprisoned in the fortress of Savona on the western Riviera for about six months, when, a conviction having been found impracticable through deficiency of evidence, he was released, but upon conditions involving so many restrictions of his liberty that he preferred the alternative of leaving the country. He withdrew accordingly into France, living chiefly in Marseilles.
While in his lonely cell at Savona, in presence of “those symbols of the infinite, the sky and the sea,” with a greenfinch for his sole companion, and having access to no books but “a Tacitus, a Byron, and a Bible,” he had finally become aware of the great mission or “apostolate” (as he himself called it) of his life; and soon after his release his prison meditations took shape in the programme of the organization which was destined soon to become so famous throughout Europe, that of La Giovine Italia, or Young Italy. Its publicly avowed aims were to be the liberation of Italy both from foreign and domestic tyranny, and its unification under a republican form of government; the means to be used were education, and, where advisable, insurrection by guerrilla bands; the motto was to be “God and the people,” and the banner was to bear on one side the words “Unity” and “Independence” and on the other “Liberty,” “Equality,” and “Humanity,” to describe respectively the national and the international aims. In April 1831 Charles Albert, “the ex-Carbonaro conspirator of 1821,” succeeded Charles Felix on the Sardinian throne, and towards the close of that year Mazzini, making himself, as he afterwards confessed, “the interpreter of a hope which he did not share,” wrote the new king a letter, published at Marseilles, urging him to take the lead in the impending struggle for Italian independence. Clandestinely reprinted, and rapidly circulated all over Italy, its bold and outspoken words produced a great sensation, but so deep was the offence it gave to the Sardinian government that orders were issued for the immediate arrest and imprisonment of the author should he attempt to cross the frontier. Towards the end of the same year appeared the important Young Italy “Manifesto,” the substance of which is given in the first volume of the Life and Writings of Mazzini; and this was followed soon afterwards by the society’s Journal, which, smuggled across the Italian frontier, had great success in the objects for which it was written, numerous “congregations” being formed at Genoa, Leghorn, and elsewhere. Representations were consequently made by the Sardinian to the French government, which issued in an order for Mazzini’s withdrawal from Marseilles (Aug. 1832); he lingered for a few months in concealment, but ultimately found it necessary to retire into Switzerland.
From this point it is somewhat difficult to follow the career of the mysterious and terrible conspirator who for twenty years out of the next thirty led a life of voluntary imprisonment (as he himself tells us) “within the four walls of a room,” and “kept no record of dates, made no biographical notes, and preserved no copies of letters.” In 1833, however, he is known to have been concerned in an abortive revolutionary movement which took place in the Sardinian army; several executions took place, and he himself was laid under sentence of death. Before the close of the same year a similar movement in Genoa had been planned, but failed through the youth and inexperience of the leaders. At Geneva, also in 1833, Mazzini set on foot L’Europe Centrale, a journal of which one of the main objects was the emancipation of Savoy; but he did not confine himself to a merely literary agitation for this end. Chiefly through his agency a considerable body of German, Polish and Italian exiles was organized, and an armed invasion of the duchy planned. The frontier was actually crossed on the 1st of February 1834, but the attack ignominiously broke down without a shot having been fired. Mazzini, who personally accompanied the expedition, is no doubt correct in attributing the failure to dissensions with the Carbonari leaders in Paris, and to want of a cordial understanding between himself and the Savoyard Ramorino, who had been chosen as military leader.
In April 1834 the “Young Europe” association “of men believing in a future of liberty, equality and fraternity for all mankind, and desirous of consecrating their thoughts and actions to the realization of that future” was formed also under the influence of Mazzini’s enthusiasm; it was followed soon afterwards by a “Young Switzerland” society, having for its leading idea the formation of an Alpine confederation, to include Switzerland, Tyrol, Savoy and the rest of the Alpine chain as well. But La Jeune Suisse newspaper was compelled to stop within a year, and in other respects the affairs of the struggling patriot became embarrassed. He was permitted to remain at Grenchen in Solothurn for a while, but at last the Swiss diet, yielding to strong and persistent pressure from abroad, exiled him about the end of 1836. In January 1837 he arrived in London, where for many months he had to carry on a hard fight with poverty and the sense of spiritual loneliness, so touchingly described by himself in the first volume of the Life and Writings. Ultimately, as he gained command of the English language, he began to earn a livelihood by writing review articles, some of which have since been reprinted, and are of a high order of literary merit; they include papers on “Italian Literature since 1830” and “Paolo Sarpi” in the Westminster Review, articles on “Lamennais,” “George Sand,” “Byron and Goethe” in the Monthly Chronicle, and on “Lamartine,” “Carlyle,” and “The Minor Works of Dante” in the British and Foreign Review. In 1839 he entered into relations with the revolutionary committees sitting in Malta and Paris, and in 1840 he originated a working 944 men’s association, and the weekly journal entitled Apostolato Popolare, in which the admirable popular treatise “On the Duties of Man” was commenced. Among the patriotic and philanthropic labours undertaken by Mazzini during this period of retirement in London may be mentioned a free evening school conducted by himself and a few others for some years, at which several hundreds of Italian children received at least the rudiments of secular and religious education. He also exposed and combated the infamous traffic carried on in southern Italy, where scoundrels bought small boys from poverty-stricken parents and carried them off to England and elsewhere to grind organs and suffer martyrdom at the hands of cruel taskmasters.
The most memorable episode in his life during the same period was perhaps that which arose out of the conduct of Sir James Graham, the home secretary, in systematically, for some months, opening Mazzini’s letters as they passed through the British post office, and communicating their contents to the Neapolitan government—a proceeding which was believed at the time to have led to the arrest and execution of the brothers Bandiera, Austrian subjects, who had been planning an expedition against Naples, although the recent publication of Sir James Graham’s life seems to exonerate him from the charge. The prolonged discussions in parliament, and the report of the committee appointed to inquire into the matter, did not, however, lead to any practical result, unless indeed the incidental vindication of Mazzini’s character, which had been recklessly assailed in the course of debate. In this connexion Thomas Carlyle wrote to The Times: “I have had the honour to know Mr Mazzini for a series of years, and, whatever I may think of his practical insight and skill in worldly affairs, I can with great freedom testify that he, if I have ever seen one such, is a man of genius and virtue, one of those rare men, numerable unfortunately but as units in this world, who are worthy to be called martyr souls; who in silence, piously in their daily life, practise what is meant by that.”
Mazzini did not share the enthusiastic hopes everywhere raised in the ranks of the Liberal party throughout Europe by the first acts of Pius IX., in 1846, but at the same time he availed himself, towards the end of 1847, of the opportunity to publish a letter addressed to the new pope, indicating the nature of the religious and national mission which the Liberals expected him to undertake. The leaders of the revolutionary outbreaks in Milan and Messina in the beginning of 1848 had long been in secret correspondence with Mazzini; and their action, along with the revolution in Paris, brought him early in the same year to Italy, where he took a great and active interest in the events which dragged Charles Albert into an unprofitable war with Austria; he actually for a short time bore arms under Garibaldi immediately before the reoccupation of Milan, but ultimately, after vain attempts to maintain the insurrection in the mountain districts, found it necessary to retire to Lugano. In the beginning of the following year he was nominated a member of the short-lived provisional government of Tuscany formed after the flight of the grand-duke, and almost simultaneously, when Rome had, in consequence of the withdrawal of Pius IX., been proclaimed a republic, he was declared a member of the constituent assembly there. A month afterwards, the battle of Novara having again decided against Charles Albert in the brief struggle with Austria, into which he had once more been drawn, Mazzini was appointed a member of the Roman triumvirate, with supreme executive power (March 23, 1849). The opportunity he now had for showing the administrative and political ability which he was believed to possess was more apparent than real, for the approach of the professedly friendly French troops soon led to hostilities, and resulted in a siege which terminated, towards the end of June, with the assembly’s resolution to discontinue the defence, and Mazzini’s indignant resignation. That he succeeded, however, for so long a time, and in circumstances so adverse, in maintaining a high degree of order within the turbulent city is a fact that speaks for itself. His diplomacy, backed as it was by no adequate physical force, naturally showed at the time to very great disadvantage, but his official correspondence and proclamations can still be read with admiration and intellectual pleasure, as well as his eloquent vindication of the revolution in his published “Letter to MM. de Tocqueville and de Falloux.” The surrender of the city on the 30th of June was followed by Mazzini’s not too precipitate flight by way of Marseilles into Switzerland, whence he once more found his way to London. Here in 1850 he became president of the National Italian Committee, and at the same time entered into close relations with Ledru-Rollin and Kossuth. He had a firm belief in the value of revolutionary attempts, however hopeless they might seem; he had a hand in the abortive rising at Mantua in 1852, and again, in February 1853, a considerable share in the ill-planned insurrection at Milan on the 6th of February 1853, the failure of which greatly weakened his influence; once more, in 1854, he had gone far with preparations for renewed action when his plans were completely disconcerted by the withdrawal of professed supporters, and by the action of the French and English governments in sending ships of war to Naples.
The year 1857 found him yet once more in Italy, where, for complicity in short-lived émeutes which took place at Genoa, Leghorn and Naples, he was again laid under sentence of death. Undiscouraged in the pursuit of the one great aim of his life by any such incidents as these, he returned to London, where he edited his new journal Pensiero ed Azione, in which the constant burden of his message to the overcautious practical politicians of Italy was: “I am but a voice crying Action; but the state of Italy cries for it also. So do the best men and people of her cities. Do you wish to destroy my influence? Act.” The same tone was at a somewhat later date assumed in the letter he wrote to Victor Emmanuel, urging him to put himself at the head of the movement for Italian unity, and promising republican support. As regards the events of 1859-1860, however, it may be questioned whether, through his characteristic inability to distinguish between the ideally perfect and the practically possible, he did not actually hinder more than he helped the course of events by which the realization of so much of the great dream of his life was at last brought about. If Mazzini was the prophet of Italian unity, and Garibaldi its knight errant, to Cavour alone belongs the honour of having been the statesman by whom it was finally accomplished. After the irresistible pressure of the popular movement had led to the establishment not of an Italian republic but of an Italian kingdom, Mazzini could honestly enough write, “I too have striven to realize unity under a monarchical flag,” but candour compelled him to add, “The Italian people are led astray by a delusion at the present day, a delusion which has induced them to substitute material for moral unity and their own reorganization. Not so I. I bow my head sorrowfully to the sovereignty of the national will; but monarchy will never number me amongst its servants or followers.” In 1865, by way of protest against the still uncancelled sentence of death under which he lay, Mazzini was elected by Messina as delegate to the Italian parliament, but, feeling himself unable to take the oath of allegiance to the monarchy, he never took his seat. In the following year, when a general amnesty was granted after the cession of Venice to Italy, the sentence of death was at last removed, but he declined to accept such an “offer of oblivion and pardon for having loved Italy above all earthly things.” In May 1869 he was again expelled from Switzerland at the instance of the Italian government for having conspired with Garibaldi; after a few months spent in England he set out (1870) for Sicily, but was promptly arrested at sea and carried to Gaeta, where he was imprisoned for two months. Events soon made it evident that there was little danger to fear from the contemplated rising, and the occasion of the birth of a prince was seized for restoring him to liberty. The remainder of his life, spent partly in London and partly at Lugano, presents no noteworthy incidents. For some time his health had been far from satisfactory, but the immediate cause of his death was an attack of pleurisy with which he was seized at Pisa, and which terminated fatally on the 10th of March 1872. The Italian parliament by a unanimous vote expressed the national sorrow with which the tidings of his death had been received, the president pronouncing an eloquent 945 eulogy on the departed patriot as a model of disinterestedness and self-denial, and one who had dedicated his whole life ungrudgingly to the cause of his country’s freedom. A public funeral took place at Pisa on the 14th of March, and the remains were afterwards conveyed to Genoa.
The published writings of Mazzini, mostly occasional, are very voluminous. An edition was begun by himself and continued by A. Saffi, Scritti editi e inediti di Giuseppe Mazzini, in 18 vols. (Milan and Rome, 1861-1891); many of the most important are found in the partially autobiographical Life and Writings of Joseph Mazzini (1864-1870) and the two most systematic—Thoughts upon Democracy in Europe, a remarkable series of criticisms on Benthamism, St Simonianism, Fourierism, and other economic and socialistic schools of the day, and the treatise On the Duties of Man, an admirable primer of ethics, dedicated to the Italian working class—will be found in Joseph Mazzini: a Memoir, by Mrs E. A. Venturi (London, 1875). Mazzini’s “first great sacrifice,” he tells us, was “the renunciation of the career of literature for the more direct path of political action,” and as late as 1861 we find him still recurring to the long-cherished hope of being able to leave the stormy arena of politics and consecrate the last years of his life to the dream of his youth. He had specially contemplated three considerable literary undertakings—a volume of Thoughts on Religion, a popular History of Italy, to enable the working classes to apprehend what he conceived to be the “mission” of Italy in God’s providential ordering of the world, and a comprehensive collection of translations of ancient and modern classics into Italian. None of these was actually achieved. No one, however, can read even the briefest and most occasional writing of Mazzini without gaining some impression of the simple grandeur of the man, the lofty elevation of his moral tone, his unwavering faith in the living God, who is ever revealing Himself in the progressive development of humanity. His last public utterance is to be found in a highly characteristic article on Renan’s Réforme Morale et Intellectuelle, finished on the 3rd of March 1872, and published in the Fortnightly Review for February 1874. Of the 40,000 letters of Mazzini only a small part have been published. In 1887 two hundred unpublished letters were printed at Turin (Duecento lettere inedite di Giuseppe Mazzini), in 1895 the Lettres intimes were published in Paris, and in 1905 Francesco Rosso published Lettre inedite di Giuseppe Mazzini (Turin, 1905). A popular edition of Mazzini’s writings has been undertaken by order of the Italian government.
For Mazzini’s biography see Jessie White Mario, Della vita di Giuseppe Mazzini (Milan, 1886), a useful if somewhat too enthusiastic work; Bolton King, Mazzini (London, 1903); Count von Schack, Joseph Mazzini und die italienische Einheit (Stuttgart, 1891). A. Luzio’s Giuseppe Mazzini (Milan, 1905) contains a great deal of valuable information, bibliographical and other, and Dora Melegari in La giovine Italia e Giuseppe Mazzini (Milan, 1906) publishes the correspondence between Mazzini and Luigi A. Melegari during the early days of “Young Italy.” For the literary side of Mazzini’s life see Peretti, Gli scritti letterarii di Giuseppe Mazzini (Turin, 1904).
MAZZONI, GIACOMO (1548-1598), Italian philosopher, was born at Cesena and died at Ferrara. A member of a noble family and highly educated, he was one of the most eminent savants of the period. He occupied chairs in the universities of Pisa and Rome, was one of the founders of the Della Crusca Academy, and had the distinction, it is said, of thrice vanquishing the Admirable Crichton in dialectic. His chief work in philosophy was an attempt to reconcile Plato and Aristotle, and in this spirit he published in 1597 a treatise In universam Platonis et Aristotelis philosophiam praecludia. He wrote also De triplici hominum vita, wherein he outlined a theory of the infinite perfection and development of nature. Apart from philosophy, he was prominent in literature as the champion of Dante, and produced two works in the poet’s defence: Discorso composto in difesa della comedia di Dante (1572), and Della difesa della comedia di Dante (1587, reprinted 1688). He was an authority on ancient languages and philology, and gave a great impetus to the scientific study of the Italian language.
MAZZONI, GUIDO (1859- ), Italian poet, was born at Florence, and educated at Pisa and Bologna. In 1887 he became professor of Italian at Padua, and in 1894 at Florence. He was much influenced by Carducci, and became prominent both as a prolific and well-read critic and as a poet of individual distinction. His chief volumes of verse are Versi (1880), Nuove poesie (1886), Poesie (1891), Voci della vita (1893).
MEAD, LARKIN GOLDSMITH (1835- ), American sculptor, was born at Chesterfield, New Hampshire, on the 3rd of January 1835. He was a pupil (1853-1855) of Henry Kirke Brown. During the early part of the Civil War he was at the front for six months, with the army of the Potomac, as an artist for Harper’s Weekly; and in 1862-1865 he was in Italy, being for part of the time attached to the United States consulate at Venice, while William D. Howells, his brother-in-law, was consul. He returned to America in 1865, but subsequently went back to Italy and lived at Florence. His first important work was a statue of Ethan Allen, now at the State House, Montpelier, Vermont. His principal works are: the monument to President Lincoln, Springfield, Illinois; “Ethan Allen” (1876), National Hall of Statuary, Capitol, Washington; an heroic marble statue, “The Father of Waters,” New Orleans; and “Triumph of Ceres,” made for the Columbian Exposition, Chicago.
His brother, William Rutherford Mead (1846- ), graduated at Amherst College in 1867, and studied architecture in New York under Russell Sturgis, and also abroad. In 1879 he and J. F. McKim, with whom he had been in partnership for two years as architects, were joined by Stanford White, and formed the well-known firm of McKim, Mead & White.
MEAD, RICHARD (1673-1754), English physician, eleventh child of Matthew Mead (1630-1699), Independent divine, was born on the 11th of August 1673 at Stepney, London. He studied at Utrecht for three years under J. G. Graevius; having decided to follow the medical profession, he then went to Leiden and attended the lectures of Paul Hermann and Archibald Pitcairne. In 1695 he graduated in philosophy and physic at Padua, and in 1696 he returned to London, entering at once on a successful practice. His Mechanical Account of Poisons appeared in 1702, and in 1703 he was admitted to the Royal Society, to whose Transactions he contributed in that year a paper on the parasitic nature of scabies. In the same year he was elected physician to St Thomas’s Hospital, and appointed to read anatomical lectures at the Surgeons’ Hall. On the death of John Radcliffe in 1714 Mead became the recognized head of his profession; he attended Queen Anne on her deathbed, and in 1727 was appointed physician to George II., having previously served him in that capacity when he was prince of Wales. He died in London on the 16th of February 1754.
Besides the Mechanical Account of Poisons (2nd ed., 1708), Mead published a treatise De imperio solis et lunae in corpora humana et morbis inde oriundis (1704), A Short Discourse concerning Pestilential Contagion, and the Method to be used to prevent it (1720), De variolis et morbillis dissertatio (1747), Medica sacra, sive de morbis insignioribus qui in bibliis memorantur commentarius (1748), On the Scurvy (1749), and Monita et praecepta medica (1751). A Life of Mead by Dr Matthew Maty appeared in 1755.
MEAD. (1) A word now only used more or less poetically for the commoner form “meadow,” properly land laid down for grass and cut for hay, but often extended in meaning to include pasture-land. “Meadow” represents the oblique case, maédwe, of O. Eng. maéd, which comes from the root seen in “mow”; the word, therefore, means “mowed land.” Cognate words appear in other Teutonic languages, a familiar instance being Ger. matt, seen in place-names such as Zermatt, Andermatt, &c. (See Grass.) (2) The name of a drink made by the fermentation of honey mixed with water. Alcoholic drinks made from honey were common in ancient times, and during the middle ages throughout Europe. The Greeks and Romans knew of such under the names of ὁδρόμελι and hydromel; mulsum was a form of mead with the addition of wine. The word is common to Teutonic languages (cf. Du. mede, Ger. Met or Meth), and is cognate with Gr. μέθυ, wine, and Sansk. mádhu, sweet drink. “Metheglin,” another word for mead, properly a medicated or spiced form of the drink, is an adaptation of the Welsh meddyglyn, which is derived from meddyg, healing (Lat. medicus) and llyn, liquor. It therefore means “spiced or medicated drink,” and is not etymologically connected with “mead.”
MEADE, GEORGE GORDON (1815-1872), American soldier, was born of American parentage at Cadiz, Spain, on the 31st of December 1815. On graduation at the United States Military Academy in 1835, he served in Florida with the 3rd Artillery against the Seminoles. Resigning from the army in 1836, he 946 became a civil engineer and constructor of railways, and was engaged under the war department in survey work. In 1842 he was appointed a second lieutenant in the corps of the topographical engineers. In the war with Mexico he was on the staffs successively of Generals Taylor, J. Worth and Robert Patterson, and was brevetted for gallant conduct at Monterey. Until the Civil War he was engaged in various engineering works, mainly in connexion with lighthouses, and later as a captain of topographical engineers in the survey of the northern lakes. In 1861 he was appointed brigadier-general of volunteers, and had command of the 2nd brigade of the Pennsylvania Reserves in the Army of the Potomac under General M’Call. He served in the Seven Days, receiving a severe wound at the action of Frazier’s Farm. He was absent from his command until the second battle of Bull Run, after which he obtained the command of his division. He distinguished himself greatly at the battles of South Mountain and Antietam. At Fredericksburg he and his division won great distinction by their attack on the position held by Jackson’s corps, and Meade was promoted major-general of volunteers, to date from the 29th of November. Soon afterwards he was placed in command of the V. corps. At Chancellorsville he displayed great intrepidity and energy, and on the eve of the battle of Gettysburg was appointed to succeed Hooker. The choice was unexpected, but Meade justified it by his conduct of the operations, and in the famous three days’ battle he inflicted a complete defeat on General Lee’s army. His reward was the commission of brigadier-general in the regular army. In the autumn of 1863 a war of manœuvre was fought between the two commanders, on the whole favourably to the Union arms. Grant, commanding all the armies of the United States, joined the Army of the Potomac in the spring of 1864, and remained with it until the end of the war; but he continued Meade in his command, and successfully urged his appointment as major-general in the regular army (Aug. 18, 1864), eulogizing him as the commander who had successfully met and defeated the best general and the strongest army on the Confederate side. After the war Meade commanded successively the military division of the Atlantic, the department of the east, the third military district (Georgia and Alabama) and the department of the south. He died at Philadelphia on the 6th of November, 1872. The degree of LL.D. was conferred upon him by Harvard University, and his scientific attainments were recognized by the American Philosophical Society and the Philadelphia Academy of Natural Sciences. There are statues of General Meade in Philadelphia and at Gettysburg.
See I. R. Pennypacker, General Meade (“Great Commanders” series, New York, 1901).
MEADE, WILLIAM (1789-1862), American Protestant Episcopal bishop, the son of Richard Kidder Meade (1746-1805), one of General Washington’s aides during the War of Independence, was born on the 11th of November 1789, near Millwood, in that part of Frederick county which is now Clarke county, Virginia. He graduated as valedictorian in 1808 at the college of New Jersey (Princeton); studied theology under the Rev. Walter Addison of Maryland, and in Princeton; was ordained deacon in 1811 and priest in 1814; and preached both in the Stone Chapel, Millwood, and in Christ Church, Alexandria, for some time. He became assistant bishop of Virginia in 1829; was pastor of Christ Church, Norfolk, in 1834-1836; in 1841 became bishop of Virginia; and in 1842-1862 was president of the Protestant Episcopal Theological Seminary in Virginia, near Alexandria, delivering an annual course of lectures on pastoral theology. In 1819 he had acted as the agent of the American Colonization Society to purchase slaves, illegally brought into Georgia, which had become the property of that state and were sold publicly at Milledgeville. He had been prominent in the work of the Education Society, which was organized in 1818 to advance funds to needy students for the ministry of the American Episcopal Church, and in the establishment of the Theological Seminary near Alexandria, as he was afterwards in the work of the American Tract Society, and the Bible Society. He was a founder and president of the Evangelical Knowledge Society (1847), which, opposing what it considered the heterodoxy of many of the books published by the Sunday School Union, attempted to displace them by issuing works of a more evangelical type. A low Churchman, he strongly opposed Tractarianism. He was active in the case against Bishop Henry Ustick Onderdonk (1789-1858) of Pennsylvania, who because of intemperance was forced to resign and was suspended from the ministry in 1844; in that against Bishop Benjamin Tredwell Onderdonk (1791-1861) of New York, who in 1845 was suspended from the ministry on the charge of intoxication and improper conduct; and in that against Bishop G. W. Doane of New Jersey. He fought against the threatening secession of Virginia, but acquiesced in the decision of the state and became presiding bishop of the Southern Church. He died in Richmond, Virginia, on the 14th of March 1862.
Among his publications, besides many sermons, were A Brief Review of the Episcopal Church in Virginia (1845); Wilberforce, Cranmer, Jewett and the Prayer Book on the Incarnation (1850); Reasons for Loving the Episcopal Church (1852); and Old Churches, Ministers and Families of Virginia (1857); a storehouse of material on the ecclesiastical history of the state.
See the Life by John Johns (Baltimore, 1867).
MEADVILLE, a city and the county-seat of Crawford county, Pennsylvania, U.S.A., on French Creek, 36 m. S. of Erie. Pop. (1900), 10,291, of whom 912 were foreign-born and 173 were negroes; (1910 census) 12,780. It is served by the Erie, and the Bessemer & Lake Erie railways. Meadville has three public parks, two general hospitals and a public library, and is the seat of the Pennsylvania College of Music, of a commercial college, of the Meadville Theological School (1844, Unitarian), and of Allegheny College (co-educational), which was opened in 1815, came under the general patronage of the Methodist Episcopal Church in 1833, and in 1909 had 322 students (200 men and 122 women). Meadville is the commercial centre of a good agricultural region, which also abounds in oil and natural gas. The Erie Railroad has extensive shops here, which in 1905 employed 46.7% of the total number of wage-earners, and there are various manufactures. The factory product in 1905 was valued at $2,074,600, being 24.4% more than that of 1900. Meadville, the oldest settlement in N.W. Pennsylvania, was founded as a fortified post by David Mead in 1793, laid out as a town in 1795, incorporated as a borough in 1823 and chartered as a city in 1866.
MEAGHER, THOMAS FRANCIS (1823-1867), Irish nationalist and American soldier, was born in Waterford, Ireland, on the 3rd of August 1823. He graduated at Stonyhurst College, Lancashire, in 1843, and in 1844 began the study of law at Dublin. He became a member of the Young Ireland Party in 1845, and in 1847 was one of the founders of the Irish Confederation. In March 1848 he made a speech before the Confederation which led to his arrest for sedition, but at his trial the jury failed to agree and he was discharged. In the following July the Confederation created a “war directory” of five, of which Meagher was a member, and he and William Smith O’Brien travelled through Ireland for the purpose of starting a revolution. The attempt proved abortive; Meagher was arrested in August, and in October was tried for high treason before a special commission at Clonmel. He was found guilty and was condemned to death, but his sentence was commuted to life imprisonment in Van Diemen’s Land, whither he was transported in the summer of 1849. Early in 1852 he escaped, and in May reached New York City. He made a tour of the cities of the United States as a popular lecturer, and then studied law and was admitted to the New York bar in 1855. He made two unsuccessful ventures in journalism, and in 1857 went to Central America, where he acquired material for another series of lectures. In 1861 he was captain of a company (which he had raised) in the 69th regiment of New York volunteers and fought at the first battle of Bull Run; he then organized an Irish brigade, of whose first regiment he was colonel until the 3rd of February 1862, when he was appointed to the command of this organization with the rank of brigadier-general. He took part in the siege of Yorktown, the battle of Fair Oaks, the seven days’ battle before 947 Richmond, and the battles of Antietam, Fredericksburg, where he was wounded, and Chancellorsville, where his brigade was reduced in numbers to less than a regiment, and General Meagher resigned his commission. On the 23rd of December 1863 his resignation was cancelled, and he was assigned to the command of the military district of Etowah, with headquarters at Chattanooga. At the close of the war he was appointed by President Johnson secretary of Montana Territory, and there, in the absence of the territorial governor, he acted as governor from September 1866 until his death from accidental drowning in the Missouri River near Fort Benton, Montana, on the 1st of July 1867. He published Speeches on the Legislative Independence of Ireland (1852).
W. F. Lyons, in Brigadier-General Thomas Francis Meagher (New York, 1870), gives a eulogistic account of his career.
MEAL. (1) (A word common to Teutonic languages, cf. Ger. Mehl, Du. meel; the ultimate source is the root seen in various Teutonic words meaning “to grind,” and in Eng. “mill,” Lat. mola, molěre, Gr. μύλη), a powder made from the edible part of any grain or pulse, with the exception of wheat, which is known as “flour.” In America the word is specifically applied to the meal produced from Indian corn or maize, as in Scotland and Ireland to that produced from oats, while in South Africa the ears of the Indian corn itself are called “mealies.” (2) Properly, eating and drinking at regular stated times of the day, as breakfast, dinner, &c., hence taking of food at any time and also the food provided. The word was in O.E. mael, which also had the meanings (now lost) of time, mark, measure, &c., which still appear in many forms of the word in Teutonic languages; thus Ger. mal, time, mark, cf. Denkmal, monument, Mahl, meal, repast, or Du. maal, Swed. mal, also with both meanings. The ultimate source is the pre-Teutonic root me- ma-, to measure, and the word thus stood for a marked-out point of time.
MEALIE, the South African name for Indian corn or maize. The word as spelled represents the pronunciation of the Cape Dutch milje, an adaptation of milho (da India), the millet of India, the Portuguese name for millet, used in South Africa for maize.
MEAN, an homonymous word, the chief uses of which may be divided thus. (1) A verb with two principal applications, to intend, purpose or design, and to signify. This word is in O.E. maenan, and cognate forms appear in other Teutonic languages, cf. Du. meenen, Ger. meinen. The ultimate origin is usually taken to be the root men-, to think, the root of “mind.” (2) An adjective and substantive meaning “that which is in the middle.” This is derived through the O. Fr. men, meien or moien, modern moyen, from the late Lat. adjective medianus, from medius, middle. The law French form mesne is still preserved in certain legal phrases (see Mesne). The adjective “mean” is chiefly used in the sense of “average,” as in mean temperature, mean birth or death rate, &c.
“Mean” as a substantive has the following principal applications; it is used of that quality, course of action, condition, state, &c., which is equally distant from two extremes, as in such phrases as the “golden (or happy) mean.” For the philosophic application see Aristotle and Ethics.
In mathematics, the term “mean,” in its most general sense, is given to some function of two or more quantities which (1) becomes equal to each of the quantities when they themselves are made equal, and (2) is unaffected in value when the quantities suffer any transpositions. The three commonest means are the arithmetical, geometrical, and harmonic; of less importance are the contraharmonical, arithmetico-geometrical, and quadratic.
From the sense of that which stands between two things, “mean,” or the plural “means,” often with a singular construction, takes the further significance of agency, instrument, &c., of which that produces some result, hence resources capable of producing a result, particularly the pecuniary or other resources by which a person is enabled to live, and so used either of employment or of property, wealth, &c. There are many adverbial phrases, such as “by all means,” “by no means,” &c., which are extensions of “means” in the sense of agency.
The word “mean” (like the French moyen) had also the sense of middling, moderate, and this considerably influenced the uses of “mean” (3). This, which is now chiefly used in the sense of inferior, low, ignoble, or of avaricious, penurious, “stingy,” meant originally that which is common to more persons or things than one. The word in O. E. is gemaéne, and is represented in the modern Ger. gemein, common. It is cognate with Lat. communis, from which “common” is derived. The descent in meaning from that which is shared alike by several to that which is inferior, vulgar or low, is paralleled by the uses of “common.”
In astronomy the “mean sun” is a fictitious sun which moves uniformly in the celestial equator and has its right ascension always equal to the sun’s mean longitude. The time recorded by the mean sun is termed mean-solar or clock time; it is regular as distinct from the non-uniform solar or sun-dial time. The “mean moon” is a fictitious moon which moves around the earth with a uniform velocity and in the same time as the real moon. The “mean longitude” of a planet is the longitude of the “mean” planet, i.e. a fictitious planet performing uniform revolutions in the same time as the real planet.
The arithmetical mean of n quantities is the sum of the quantities divided by their number n. The geometrical mean of n quantities is the nth root of their product. The harmonic mean of n quantities is the arithmetical mean of their reciprocals. The significance of the word “mean,” i.e., middle, is seen by considering 3 instead of n quantities; these will be denoted by a, b, c. The arithmetic mean b, is seen to be such that the terms a, b, c are in arithmetical progression, i.e. b = 1⁄2(a + c); the geometrical mean b places a, b, c in geometrical progression, i.e. in the proportion a : b :: b : c or b2 = ac; and the harmonic mean places the quantities in harmonic proportion, i.e. a : c :: a − b : b − c, or b = 2ac/(a + c). The contraharmonical mean is the quantity b given by the proportion a : c :: b − c : a − b, i.e. b = (a2 + c2)/(a + c). The arithmetico-geometrical mean of two quantities is obtained by first forming the geometrical and arithmetical means, then forming the means of these means, and repeating the process until the numbers become equal. They were invented by Gauss to facilitate the computation of elliptic integrals. The quadratic mean of n quantities is the square root of the arithmetical mean of their squares.
MEASLES, (Morbilli, Rubeola; the M. E. word is maseles, properly a diminutive of a word meaning “spot,” O.H.G. māsa, cf. “mazer”; the equivalent is Ger. Masern; Fr. Rougeole), an acute infectious disease occurring mostly in children. It is mentioned in the writings of Rhazes and others of the Arabian physicians in the 10th century. For long, however, it was held to be a variety of small-pox. After the non-identity of these two diseases had been established, measles and scarlet-fever continued to be confounded with each other; and in the account given by Thomas Sydenham of epidemics of measles in London in 1670 and 1674 it is evident that even that accurate observer had not as yet clearly perceived their pathological distinction, although it would seem to have been made a century earlier by Giovanni Filippo Ingrassias (1510-1580), a physician of Palermo. The specific micro-organism responsible for measles has not been definitely isolated.
Its progress is marked by several stages more or less sharply defined. After the reception of the contagion into the system, there follows a period of incubation or latency during which scarcely any disturbance of the health is perceptible. This period generally lasts for from ten to fourteen days, when it is followed by the invasion of the symptoms specially characteristic of measles. These consist in the somewhat sudden onset of acute catarrh of the mucous membranes. At this stage minute white spots in the buccal mucous membrane frequently occur; when they do, they are diagnostic of the disease. Sneezing, accompanied with a watery discharge, sometimes bleeding, from the nose, redness and watering of the eyes, cough of a short, frequent, and noisy character, with little or no expectoration, hoarseness of the voice, and occasionally sickness and diarrhoea, are the chief local phenomena of this stage. With these there is well-marked febrile disturbance, the temperature being elevated (102°-104° F.), and the pulse rapid, while headache, thirst, and restlessness are usually present. In some instances, these initial symptoms are slight, and the child is allowed to associate with 948 others at a time when, as will be afterwards seen, the contagion of the disease is most active. In rare cases, especially in young children, convulsions usher in, or occur in the course of, this stage of invasion, which lasts as a rule for four or five days, the febrile symptoms, however, showing some tendency to undergo abatement after the second day. On the fourth or fifth day after the invasion, sometimes later, rarely earlier, the characteristic eruption appears on the skin, being first noticed on the brow, cheeks, chin, also behind the ears, and on the neck. It consists of small spots of a dusky red or crimson colour, just like flea-bites, slightly elevated above the surface, at first isolated, but tending to become grouped into patches of irregular, occasionally crescentic, outline, with portions of skin free from the eruption intervening. The face acquires a swollen and bloated appearance, which, taken with the catarrh of the nostrils and eyes, is almost characteristic, and renders the diagnosis at this stage a matter of no difficulty. The eruption spreads downwards over the body and limbs, which are soon thickly studded with the red spots or patches. Sometimes these become confluent over a considerable surface. The rash continues to come out for two or three days, and then begins to fade in the order in which it first showed itself, namely from above downwards. By the end of about a week after its first appearance scarcely any trace of the eruption remains beyond a faint staining of the skin. Usually during convalescence slight peeling of the epidermis takes place, but much less distinctly than is the case in scarlet fever. At the commencement of the eruptive stage the fever, catarrh, and other constitutional disturbance, which were present from the beginning, become aggravated, the temperature often rising to 105° or more, and there is headache, thirst, furred tongue, and soreness of the throat, upon which red patches similar to those on the surface of the body may be observed. These symptoms usually decline as soon as the rash has attained its maximum, and often there occurs a sudden and extensive fall of temperature, indicating that the crisis of the disease has been reached. In favourable cases convalescence proceeds rapidly, the patient feeling perfectly well even before the rash has faded from the skin.
Measles may, however, occur in a very malignant form, in which the symptoms throughout are of urgent character, the rash but feebly developed, and of dark purple hue, while there is great prostration, accompanied with intense catarrh of the respiratory or gastro-intestinal mucous membrane. Such cases are rare, occurring mostly in circumstances of bad hygiene, both as regards the individual and his surroundings. On the other hand, cases of measles are often of so mild a form throughout that the patient can scarcely be persuaded to submit to treatment.
Measles as a disease derives its chief importance from the risk, by no means slight, of certain complications which are apt to arise during its course, more especially inflammatory affections of the respiratory organs. These are most liable to occur in the colder seasons of the year and in very young and delicate children. It has been already stated that irritation of the respiratory passages is one of the symptoms characteristic of measles, but that this subsides with the decline of the eruption. Not unfrequently, however, these symptoms, instead of abating, become aggravated, and bronchitis of the capillary form (see Bronchitis), or pneumonia, generally of the diffuse or lobular variety (see Pneumonia), supervene. By far the greater proportion of the mortality in measles is due to its complications, of which those just mentioned are the most common, but which also include inflammatory affections of the larynx, with attacks resembling croup, and also diarrhoea assuming a dysenteric character. Or there may remain as direct results of the disease chronic ophthalmia, or discharge from the ears with deafness, and occasionally a form of gangrene affecting the tissues of the mouth or cheeks and other parts of the body, leading to disfigurement and gravely endangering life.
Apart from those immediate risks there appears to be a tendency in many cases for the disease to leave behind a weakened and vulnerable condition of the general health, which may render children, previously robust, delicate and liable to chest complaints, and is in not a few instances the precursor of some of those tubercular affections to which the period of childhood and youth is liable. These various effects or sequelae of measles indicate that although in itself a comparatively mild ailment, it should not be regarded with indifference. Indeed it is doubtful whether any other disease of early life demands more careful watching as to its influence on the health. Happily many of those attending evils may by proper management be averted.
Measles is a disease of the earlier years of childhood. Like other infectious maladies, it is admittedly rare, though not unknown, in nurslings or infants under six months old. It is comparatively seldom met with in adults, but this is due to the fact that most persons have undergone an attack in early life. Where this has not been the case, the old suffer equally with the young. All races of men appear liable to this disease, provided that which constitutes the essential factor in its origin and spread exists, namely, contagion. Some countries enjoy long immunity from outbreaks of measles, but it has frequently been found in such cases that when the contagion has once been introduced the disease extends with great rapidity and virulence. This was shown by the epidemic in the Faroe Islands in 1846, where, within six months after the arrival of a single case of measles, more than three-fourths of the entire population were attacked and many perished; and the similarly produced and still more destructive outbreak in Fiji in 1875, in which it was estimated that about one-fourth of the inhabitants died from the disease in about three months. In both these cases the great mortality was due to the complications of the malady, specially induced by overcrowding, insanitary surroundings, the absence of proper nourishment and nursing for the sick, and the utter prostration and terror of the people, and to the disease being specially malignant, occurring on what might be termed virgin soil.1 It may be regarded as an invariable rule that the first epidemic of any disease in a community is specially virulent, each successive attack conferring a certain immunity.
In many lands, such as the United Kingdom, measles is rarely absent, especially from large centres of population, where sporadic cases are found at all seasons. Every now and then epidemics arise from the extension of the disease among those members of a community who have not been in some measure protected by a previous attack. There are few diseases so contagious as measles, and its rapid spread in epidemic outbreaks is no doubt due to the well-ascertained fact that contagion is most potent in the earlier stages, even before its real nature has been evinced by the characteristic appearances on the skin. Hence the difficulty of timely isolation, and the readiness with which the disease is spread in schools and families. The contagion is present in the skin and the various secretions. While the contagion is generally direct, it can also be conveyed by the particles from the nose and mouth which, after being expelled, become dry and are conveyed as dust on clothes, toys, &c. Fortunately the germs of measles do not retain their virulence long under such conditions, comparing favourably with those of some other diseases.
Treatment.—The treatment embraces the preventive measures to be adopted by the isolation of the sick at as early a period as possible. Epidemics have often, especially in limited localities, been curtailed by such a precaution. In families with little house accommodation this measure is frequently, for the reason given regarding the communicable period of the disease, ineffectual; nevertheless where practicable it ought to be tried. The unaffected children should be kept from school for a time (probably about three weeks from the outbreak in the family would suffice if no other case occur in the interval), and all clothing in contact with the patient or nurses should be disinfected. In extensive epidemics it is often desirable to close the schools for a time. As regards special treatment, in an ordinary case of measles little is required beyond what is necessary in febrile conditions generally. Confinement to bed in a somewhat darkened room, into which, however, air is freely 949 admitted; light, nourishing, liquid diet (soups, milk, &c.), water almost ad lib. to drink, and mild diaphoretic remedies such as the acetate of ammonia or ipecacuanha, are all that is necessary in the febrile stage. When the fever is very severe, sponging the body generally or the chest and arms affords relief. The serious chest complications of measles are to be dealt with by those measures applicable for the relief of the particular symptoms (see Bronchitis; Pneumonia). The preparations of ammonia are of special efficacy. During convalescence the patient must be guarded from exposure to cold, and for a time after recovery the state of the health ought to be watched with a view of averting the evils, both local and constitutional, which too often follow this disease.
“German measles” (Rötheln, or Epidemic Roseola) is a term applied to a contagious eruptive disorder having certain points of resemblance to measles, and also to scarlet fever, but exhibiting its distinct individuality in the fact that it protects from neither of these diseases. It occurs most commonly in children, but frequently in adults also, and is occasionally seen in extensive epidemics. Beyond confinement to the house in the eruptive stage, which, from the slight symptoms experienced, is often difficult of accomplishment, no special treatment is called for. There is little doubt that the disease is often mistaken for true measles, and many of the alleged second attacks of the latter malady are probably cases of rötheln. The chief points of difference are the following: (1) The absence of distinct premonitory symptoms, the stage of invasion, which in measles is usually of four days’ duration, and accompanied with well-marked fever and catarrh, being in rötheln either wholly absent or exceedingly slight, enduring only for one day. (2) The eruption of rötheln, which, although as regards its locality and manner of progress similar to measles, differs somewhat in its appearance, the spots being of smaller size, paler colour, and with less tendency to grouping in crescentic patches. The rash attains its maximum in about one day, and quickly disappears. There is not the same increase of temperature in this stage as in measles. (3) The presence of white spots on the buccal mucous membrane, in the case of measles. (4) The milder character of the symptoms of rötheln throughout its whole course, and the absence of complications and of liability to subsequent impairment of health such as have been seen to appertain to measles.
1 Transactions of the Epidemiological Society (London, 1877).
MEAT, a word originally applied to food in general, and so still used in such phrases as “meat and drink”; but now, except as an archaism, generally used of the flesh of certain domestic animals, slaughtered for human food by butchers, “butcher’s meat,” as opposed to “game,” that of wild animals, “fish” or “poultry.” Cognate forms of the O. Eng. mete are found in certain Teutonic languages, e.g. Swed. mat, Dan. mad and O. H. Ger. Maz. The ultimate origin has been disputed; the New English Dictionary considers probable a connexion with the root med-, “to be fat,” seen in Sansk. mēda, Lat. madere, “to be wet,” and Eng. “mast,” the fruit of the beech as food for pigs.
See Dietetics; Food Preservation; Public Health; Agriculture; and the sections dealing with agricultural statistics under the names of the various countries.
MEATH (pronounced with th soft, as in the), a county of Ireland in the province of Leinster, bounded E. by the Irish Sea, S.E. by Dublin, S. by Kildare and King’s County, W. by Westmeath, N.W. by Cavan and Monaghan, and N.E. by Louth. Area 579,320 acres, or about 905 sq. m. In some districts the surface is varied by hills and swells, which to the west reach a considerable elevation, although the general features of a fine champain country are never lost. The coast, low and shelving, extends about 10 m., but there is no harbour of importance. Laytown is a small seaside resort, 5 m. S.E. of Drogheda. The Boyne enters the county at its south-western extremity, and flowing north-east to Drogheda divides it into two almost equal parts. At Navan it receives the Blackwater, which flows south-west from Cavan. Both these rivers are noted for their trout, and salmon are taken in the Boyne. The Boyne is navigable for barges as far as Navan whence a canal is carried to Trim. The Royal Canal passes along the southern boundary of the county from Dublin.
In the north is a broken country of Silurian rocks with much igneous material, partly contemporaneous, partly intrusive, near Slane. Carboniferous Limestone stretches from the Boyne valley to the Dublin border, giving rise to a flat plain especially suitable for grazing. Outliers of higher Carboniferous strata occur on the surface; but the Coal Measures have all been removed by denudation.
The climate is genial and favourable for all kinds of crops, there being less rain than even in the neighbouring counties. Except a small portion occupied by the Bog of Allen, the county is verdant and fertile. The soil is principally a rich deep loam resting on limestone gravel, but varies from a strong clayey loam to a light sandy gravel. The proportion of tillage to pasturage is roughly as 1 to 31⁄2. Oats, potatoes and turnips are the principal crops, but all decrease. The numbers of cattle, sheep and poultry, however, are increasing or well maintained. Agriculture is almost the sole industry, but coarse linen is woven by hand-looms, and there are a few woollen manufactories. The main line of the Midland Great Western railway skirts the southern boundary, with a branch line north from Clonsilla to Navan and Kingscourt (county Cavan). From Kilmessan on this line a branch serves Trim and Athboy. From Drogheda (county Louth) a branch of the Great Northern railway crosses the county from east to West by Navan and Kells to Oldcastle.
The population (76,111 in 1891; 67,497 in 1901) suffers a large decrease, considerably above the average of Irish counties, and emigration is heavy. Nearly 93% are Roman Catholics. The chief towns are Navan (pop. 3839), Kells (2428) and Trim (1513), the county town. Lesser market towns are Oldcastle and Athboy, an ancient town which received a charter from Henry IV. The county includes eighteen baronies. Assizes are held at Trim, and quarter sessions at Kells, Navan and Trim. The county is in the Protestant dioceses of Armagh, Kilmore and Meath, and in the Roman Catholic dioceses of Armagh and Meath. Before the Union in 1800 it sent fourteen members to parliament, but now only two members are returned, for the north and south divisions of the county respectively.
History and Antiquities.—A district known as Meath (Midhe), and including the present county of Meath as well as Westmeath and Longford, with parts of Cavan, Kildare and King’s County, was formed by Tuathal (c. 130) into a kingdom to serve as mensal land or personal estate of the Ard Ri or over-king of Ireland. Kings of Meath reigned until 1173, and the title was claimed as late as the 15th century by their descendants, but at the date mentioned Hugh de Lacy obtained the lordship of the country and was confirmed in it by Henry II. Meath thus came into the English “Pale.” But though it was declared a county in the reign of Edward I. (1296), and though it came by descent into the possession of the Crown in the person of Edward IV., it was long before it was fully subdued and its boundaries clearly defined. In 1543 Westmeath was created a county apart from that of Meath, but as late as 1598 Meath was still regarded as a province by some, who included in it the counties Westmeath, East Meath, Longford and Cavan. In the early part of the 17th century it was at last established as a county, and no longer considered as a fifth province of Ireland.
There are two ancient round towers, the one at Kells and the other in the churchyard of Donaghmore, near Navan. By the river Boyne near Slane there is an extensive ancient burial-place called Brugh. Here are some twenty burial mounds, the largest of which is that of New Grange, a domed tumulus erected above a circular chamber, which is entered by a narrow passage enclosed by great upright blocks of stone, covered with carvings. The mound is surrounded by remains of a stone circle, and the whole forms one of the most remarkable extant erections of its kind. Tara (q.v.) is famous in history, especially as the seat of a royal palace referred to in the well-known lines of Thomas Moore. Monastic buildings were very numerous in Meath, among the more important ruins being those of Duleek, which is said to have been the first ecclesiastical building in Ireland of stone and mortar; the extensive remains of Bective Abbey; and those of Clonard, where also were a cathedral and a famous college. Of the old fortresses, the castle of Trim still presents an imposing appearance. There are many fine old mansions.
MEAUX, a town of northern France, capital of an arrondissement in the department of Seine-et-Marne, and chief town of the agricultural region of Brie, 28 m. E.N.E. of Paris by rail. Pop. (1906), 11,089. The town proper stands on an eminence on the right bank of the Marne; on the left bank lies the old suburb of Le Marché, with which it is united by a bridge of the 16th century. Two rows of picturesque mills of the same period are built across the river. The cathedral of St Stephen dates from the 12th to the 16th centuries, and was restored in 950 the 19th century. Of the two western towers, the completed one is that to the north of the façade, the other being disfigured by an unsightly slate roof. The building, which is 275 ft. long and 105 ft. high, consists of a short nave, with aisles, a fine transept, a choir and a sanctuary. The choir contains the statue and the tomb of Bossuet, bishop from 1681 to 1704, and the pulpit of the cathedral has been reconstructed with the panels of that from which the “eagle of Meaux” used to preach. The transept terminates at each end in a fine portal surmounted by a rose-window. The episcopal palace (17th century) has several curious old rooms; the buildings of the choir school are likewise of some archaeological interest. A statue of General Raoult (1870) stands in one of the squares.
Meaux is the centre of a considerable trade in cereals, wool, Brie cheeses, and other farm-produce, while its mills provide much of the flour with which Paris is supplied. Other industries are saw-milling, metal-founding, distilling, the preparation of vermicelli and preserved vegetables, and the manufacture of mustard, hosiery, plaster and machinery. There are nursery-gardens in the vicinity. The Canal de l’Ourcq, which surrounds the town, and the Marne furnish the means of transport. Meaux is the seat of a bishopric dating from the 4th century, and has among its public institutions a sub-prefecture, and tribunals of first instance and of commerce.
In the Roman period Meaux was the capital of the Meldi, a small Gallic tribe, and in the middle ages of the Brie. It formed part of the kingdom of Austrasia, and afterwards belonged to the counts of Vermandois and Champagne, the latter of whom established important markets on the left bank of the Marne. Its communal charter, received from them, is dated 1179. A treaty signed at Meaux in 1229 after the Albigensian War sealed the submission of Raymond VII., count of Toulouse. The town suffered much during the Jacquerie, the peasants receiving a severe check there in 1358; during the Hundred Years’ War; and also during the Religious Wars, in which it was an important Protestant centre. It was the first town which opened its gates to Henry IV. in 1594. On the high-road for invaders marching on Paris from the east of France, Meaux saw its environs ravaged by the army of Lorraine in 1652, and was laid under heavy requisitions in 1814, 1815 and 1870. In September 1567 Meaux was the scene of an attempt made by the Protestants to seize the French king Charles IX., and his mother Catherine de’ Medici. The plot, which is sometimes called the “enterprise of Meaux,” failed, the king and queen with their courtiers escaping to Paris. This conduct, however, on the part of the Huguenots had doubtless some share in influencing Charles to assent to the massacre of St Bartholomew.
MECCA (Arab. Makkah),1 the chief town of the Hejaz in Arabia, and the great holy city of Islām. It is situated two camel marches (the resting-place being Bahra or Hadda), or about 45 m. almost due E., from Jidda on the Red Sea. Thus on a rough estimate Mecca lies in 21° 25′ N., 39° 50′ E. It is said in the Koran (Sur. xiv. 40) that Mecca lies in a sterile valley, and the old geographers observe that the whole Haram or sacred territory round the city is almost without cultivation or date palms, while fruit trees, springs, wells, gardens and green valleys are found immediately beyond. Mecca in fact lies in the heart of a mass of rough hills, intersected by a labyrinth of narrow valleys and passes, and projecting into the Tehāma or low country on the Red Sea, in front of the great mountain wall that divides the coast-lands from the central plateau, though in turn they are themselves separated from the sea by a second curtain of hills forming the western wall of the great Wādi Marr. The inner mountain wall is pierced by only two great passes, and the valleys descending from these embrace on both sides the Mecca hills.
Holding this position commanding two great routes between the lowlands and inner Arabia, and situated in a narrow and barren valley incapable of supporting an urban population, Mecca must have been from the first a commercial centre.2 In the palmy days of South Arabia it was probably a station on the great incense route, and thus Ptolemy may have learned the name, which he writes Makoraba. At all events, long before Mahomet we find Mecca established in the twofold quality of a commercial centre and a privileged holy place, surrounded by an inviolable territory (the Haram), which was not the sanctuary of a single tribe but a place of pilgrimage, where religious observances were associated with a series of annual fairs at different points in the vicinity. Indeed in the unsettled state of the country commerce was possible only under the sanctions of religion, and through the provisions of the sacred truce which prohibited war for four months of the year, three of these being the month of pilgrimage, with those immediately preceding and following. The first of the series of fairs in which the Meccans had an interest was at Okaz on the easier road between Mecca and Taif, where there was also a sanctuary, and from it the visitors moved on to points still nearer Mecca (Majanna, and finally Dhul-Majāz, on the flank of Jebel Kabkab behind Arafa) where further fairs were held,3 culminating in the special religious ceremonies of the great feast at ‘Arafa, Quzaḥ (Mozdalifa), and Mecca itself. The system of intercalation in the lunar calendar of the heathen Arabs was designed to secure that the feast should always fall at the time when the hides, fruits and other merchandise were ready for market,4 and the Meccans, who knew how to attract the Bedouins by hospitality, bought up these wares in exchange for imported goods, and so became the leaders of the international trade of Arabia. Their caravans traversed the length and breadth of the peninsula. Syria, and especially Gaza, was their chief goal. The Syrian caravan intercepted, on its return, at Badr (see Mahomet) represented capital to the value of £20,000, an enormous sum for those days.5
The victory of Mahommedanism made a vast change in the position of Mecca. The merchant aristocracy became satraps or pensioners of a great empire; but the seat of dominion was removed beyond the desert, and though Mecca and the Hejāz strove for a time to maintain political as well as religious predominance, the struggle was vain, and terminated on the death of Ibn Zubair, the Meccan pretendant to the caliphate, when the city was taken by Hajjāj (A.D. 692). The sanctuary and feast of Mecca received, however, a new prestige from the victory of Islām. Purged of elements obviously heathen, the Ka‘ba became the holiest site, and the pilgrimage the most sacred ritual observance of Mahommedanism, drawing worshippers from so wide a circle that the confluence of the petty traders of the desert was no longer the main feature of the holy season. The pilgrimage retained its importance for the commercial well-being of Mecca; to this day the Meccans live by the Hajj—letting rooms, acting as guides and directors in the sacred ceremonies, as contractors and touts for land and sea transport, as well as exploiting the many benefactions that flow to the holy city; while the surrounding Bedouins derive support from the camel-transport it demands and from the subsidies by which they are engaged to protect or abstain from molesting the pilgrim caravans. But the ancient “fairs of heathenism” were given up, and the traffic of the pilgrim season, sanctioned by the Prophet in Sur. ii. 194, was concentrated at Minā and Mecca, where most of the pilgrims still have something to buy or sell, so that Minā, after the sacrifice of the feast day, presents the aspect of a huge international fancy 951 fair.6 In the middle ages this trade was much more important than it is now. Ibn Jubair (ed. Wright, p. 118 seq.) in the 12th century describes the mart of Mecca in the eight days following the feast as full of gems, unguents, precious drugs, and all rare merchandise from India, Irāk, Khorāsān, and every part of the Moslem world.
The hills east and west of Mecca, which are partly built over and rise several hundred feet above the valley, so enclose the city that the ancient walls only barred the valley at three points, where three gates led into the town. In the time of Ibn Jubair the gates still stood though the walls were ruined, but now the gates have only left their names to quarters of the town. At the northern or upper end was the Bāb el Mā‘lā, or gate of the upper quarter, whence the road continues up the valley towards Minā and Arafa as well as towards Zeima and the Nejd. Beyond the gate, in a place called the Hajūn, is the chief cemetery, commonly called el Mā‘lā, and said to be the resting-place of many of the companions of Mahomet. Here a cross-road, running over the hill to join the main Medina road from the western gate, turns off to the west by the pass of Kadā, the point from which the troops of the Prophet stormed the city (A.H. 8).7 Here too the body of Ibn Zubair was hung on a cross by Ḥajjāj. The lower or southern gate, at the Masfala quarter, opened on the Yemen road, where the rain-water from Mecca flows off into an open valley. Beyond, there are mountains on both sides; on that to the east, commanding the town, is the great castle, a fortress of considerable strength. The third or western gate, Bāb el-Omra (formerly also Bāb el-Zāhir, from a village of that name), lay almost opposite the great mosque, and opened on a road leading westwards round the southern spurs of the Red Mountain. This is the way to Wādi Fātima and Medīna, the Jidda road branching off from it to the left. Considerable suburbs now lie outside the quarter named after this gate; in the middle ages a pleasant country road led for some miles through partly cultivated land with good wells, as far as the boundary of the sacred territory and gathering place of the pilgrims at Tanīm, near the mosque of Ayesha. This is the spot on the Medīna road now called the Omra, from a ceremonial connected with it which will be mentioned below.
The length of the sinuous main axis of the city from the farthest suburbs on the Medina road to the suburbs in the extreme north, now frequented by Bedouins, is, according to Burckhardt, 3500 paces.8 About the middle of this line the longitudinal thoroughfares are pushed aside by the vast courtyard and colonnades composing the great mosque, which, with its spacious arcades surrounding the Ka‘ba and other holy places, and its seven minarets, forms the only prominent architectural feature of the city. The mosque is enclosed by houses with windows opening on the arcades and commanding a view of the Ka‘ba. Immediately beyond these, on the side facing Jebel Abu Kobais, a broad street runs south-east and north-west across the valley. This is the Mas‘ā (sacred course) between the eminences of Safā and Merwa, and has been from very early times one of the most lively bazaars and the centre of Meccan life. The other chief bazaars are also near the mosque in smaller streets. The general aspect of the town is picturesque; the streets are fairly spacious, though ill-kept and filthy; the houses are all of stone, many of them well-built and four or five storeys high, with terraced roofs and large projecting windows as in Jidda—a style of building which has not varied materially since the 10th century (Mukaddasī, p. 71), and gains in effect from the way in which the dwellings run up the sides and spurs of the mountains. Of public institutions there are baths, ribāṭs, or hospices, for poor pilgrims from India, Java, &c., a hospital and a public kitchen for the poor.
The mosque is at the same time the university hall, where between two pilgrim seasons lectures are delivered on Mahommedan law, doctrine and connected branches of science. A poorly provided public library is open to the use of students. The madrassehs or buildings around the mosque, originally intended as lodgings for students and professors, have long been let out to rich pilgrims. The minor places of visitation for pilgrims, such as the birthplaces of the prophet and his chief followers, are not notable.9 Both these and the court of the great mosque lie beneath the general level of the city, the site having been gradually raised by accumulated rubbish. The town in fact has little air of antiquity; genuine Arab buildings do not last long, especially in a valley periodically ravaged by tremendous floods when the tropical rains burst on the surrounding hills. The history of Mecca is full of the record of these inundations, unsuccessfully combated by the great dam drawn across the valley by the caliph Omar (Kutbeddin, p. 76), and later works of Mahdī.10
The fixed population of Mecca in 1878 was estimated by Assistant-Surgeon ‘Abd el-Razzāq at 50,000 to 60,000; there is a large floating population—and that not merely at the proper season of pilgrimage, the pilgrims of one season often beginning to arrive before those of the former season have all dispersed. At the height of the season the town is much overcrowded, and the entire want of a drainage system is severely felt. Fortunately good water is tolerably plentiful; for, though the wells are mostly undrinkable, and even the famous Zamzam water only available for medicinal or religious purposes, the underground conduit from beyond Arafa, completed by Sultan Selim II. in 1571, supplies to the public fountains a sweet and light water, containing, according to ‘Abd el-Razzāq, a large amount of chlorides. The water is said to be free to townsmen, but is sold to the pilgrims at a rather high rate.11
Medieval writers celebrate the copious supplies, especially of fine fruits, brought to the city from Tāif and other fertile parts of Arabia. These fruits are still famous; rice and other foreign products are brought by sea to Jidda; mutton, milk and butter are plentifully supplied from the desert.12 The industries all centre in the pilgrimage; the chief object of every Meccan—from the notables and sheikhs, who use their influence to gain custom for the Jidda speculators in the pilgrim traffic, down to the cicerones, pilgrim brokers, lodging-house keepers, and mendicants at the holy places—being to pillage the visitor in every possible way. The fanaticism of the Meccan is an affair of the purse; the mongrel population (for the town is by no means purely Arab) has exchanged the virtues of the Bedouin for the worst corruptions of Eastern town life, without casting off the ferocity of the desert, and it is hardly possible to find a worse certificate of character than the three parallel gashes on each cheek, called Tashrīṭ, which are the customary mark of birth in the holy city. The unspeakable vices of Mecca are a scandal to all Islām, and a constant source of wonder to pious pilgrims.13 The slave trade has connexions with the pilgrimage which are not thoroughly clear; but under cover of the pilgrimage a great deal of importation and exportation of slaves goes on.
Since the fall of Ibn Zubair the political position of Mecca 952 has always been dependent on the movements of the greater Mahommedan world. In the splendid times of the caliphs immense sums were lavished upon the pilgrimage and the holy city; and conversely the decay of the central authority of Islām brought with it a long period of faction, wars and misery, in which the most notable episode was the sack of Mecca by the Carmathians at the pilgrimage season of A.D. 930. The victors carried off the “black stone,” which was not restored for twenty-two years, and then only for a great ransom, when it was plain that even the loss of its palladium could not destroy the sacred character of the city. Under the Fatimites Egyptian influence began to be strong in Mecca; it was opposed by the sultans of Yemen, while native princes claiming descent from the Prophet—the Hāshimite amīrs of Mecca, and after them the amīrs of the house of Qatāda (since 1202)—attained to great authority and aimed at independence; but soon after the final fall of the Abbasids the Egyptian overlordship was definitely established by sultan Bībars (A.D. 1269). The Turkish conquest of Egypt transferred the supremacy to the Ottoman sultans (1517), who treated Mecca with much favour, and during the 16th century executed great works in the sanctuary and temple. The Ottoman power, however, became gradually almost nominal, and that of the amīrs or sherīfs increased in proportion, culminating under Ghālib, whose accession dates from 1786. Then followed the wars of the Wahhābīs (see Arabia and Wahhābīs) and the restoration of Turkish rule by the troops of Mehemet ‘Ali. By him the dignity of sherīf was deprived of much of its weight, and in 1827 a change of dynasty was effected by the appointment of Ibn ‘Aun. Afterwards Turkish authority again decayed. Mecca is, however, officially the capital of a Turkish province, and has a governor-general and a Turkish garrison, while Mahommedan law is administered by a judge sent from Constantinople. But the real sovereign of Mecca and the Hejāz is the sherīf, who, as head of a princely family claiming descent from the Prophet, holds a sort of feudal position. The dignity of sherīf (or grand sherīf, as Europeans usually say for the sake of distinction, since all the kin of the princely houses reckoning descent from the Prophet are also named sherīfs), although by no means a religious pontificate, is highly respected owing to its traditional descent in the line of Hasan, son of the fourth caliph ‘Ali. From a political point of view the sherīf is the modern counterpart of the ancient amīrs of Mecca, who were named in the public prayers immediately after the reigning caliph. When the great Mahommedan sultanates had become too much occupied in internecine wars to maintain order in the distant Hejāz, those branches of the Hassanids which from the beginning of Islam had retained rural property in Arabia usurped power in the holy cities and the adjacent Bedouin territories. About A.D. 960 they established a sort of kingdom with Mecca as capital. The influence of the princes of Mecca has varied from time to time, according to the strength of the foreign protectorate in the Hejāz or in consequence of feuds among the branches of the house; until about 1882 it was for most purposes much greater than that of the Turks. The latter were strong enough to hold the garrisoned towns, and thus the sultan was able within certain limits—playing off one against the other the two rival branches of the aristocracy, viz. the kin of Ghālib and the house of Ibn‘Aun—to assert the right of designating or removing the sherīf, to whom in turn he owed the possibility of maintaining, with the aid of considerable pensions, the semblance of his much-prized lordship over the holy cities. The grand sherīf can muster a considerable force of freedmen and clients, and his kin, holding wells and lands in various places through the Hejāz, act as his deputies and administer the old Arabic customary law to the Bedouin. To this influence the Hejāz owes what little of law and order it enjoys. During the last quarter of the 19th century Turkish influence became preponderant in western Arabia, and the railway from Syria to the Hejāz tended to consolidate the sultan’s supremacy. After the sherīfs, the principal family of Mecca is the house of Shaibah, which holds the hereditary custodianship of the Ka‘ba.
The Great Mosque and the Ka‘ba.—Long before Mahomet the chief sanctuary of Mecca was the Ka‘ba, a rude stone building without windows, and having a door 7 ft. from the ground; and so named from its resemblance to a monstrous astragalus (die) of about 40 ft. cube, though the shapeless structure is not really an exact cube nor even exactly rectangular.14 The Ka‘ba has been rebuilt more than once since Mahomet purged it of idols and adopted it as the chief sanctuary of Islām, but the old form has been preserved, except in secondary details;15 so that the “Ancient House,” as it is titled, is still essentially a heathen temple, adapted to the worship of Islām by the clumsy fiction that it was built by Abraham and Ishmael by divine revelation as a temple of pure monotheism, and that it was only temporarily perverted to idol worship from the time when ‘Amr ibn Lohai introduced the statue of Hobal from Syria16 till the victory of Islam. This fiction has involved the superinduction of a new mythology over the old heathen ritual, which remains practically unchanged. Thus the chief object of veneration is the black stone, which is fixed in the external angle facing Safā. The building is not exactly oriented, but it may be called the south-east corner. Its technical name is the black corner, the others being named the Yemen (south-west), Syrian (north-west), and Irāk (north-east) corners, from the lands to which they approximately point. The black stone is a small dark mass a span long, with an aspect suggesting volcanic or meteoric origin, fixed at such a height that it can be conveniently kissed by a person of middle size. It was broken by fire in the siege of A.D. 683 (not, as many authors relate, by the Carmathians), and the pieces are kept together by a silver setting. The history of this heavenly stone, given by Gabriel to Abraham, does not conceal the fact that it was originally a fetish, the most venerated of a multitude of idols and sacred stones which stood all round the sanctuary in the time of Mahomet. The Prophet destroyed the idols, but he left the characteristic form of worship—the ṭawāf, or sevenfold circuit of the sanctuary, the worshipper kissing or touching the objects of his veneration—and besides the black stone he recognized the so-called “southern” stone, the same presumably as that which is still touched in the ṭawāf at the Yemen corner (Muh. in Med. pp. 336, 425). The ceremony of the ṭawāf and the worship of stone fetishes was common to Mecca with other ancient Arabian sanctuaries.17 It was, as it still is, a frequent religious exercise of the Meccans, and the first duty of one who returned to the city or arrived there under a vow of pilgrimage; and thus the outside of the Ka‘ba was and is more important than the inside. Islām did away with the worship of idols; what was lost in interest by their suppression 953 has been supplied by the invention of spots consecrated by recollections of Abraham, Ishmael and Hagar, or held to be acceptable places of prayer. Thus the space of ten spans between the black stone and the door, which is on the east side, between the black and Irāk corners, and a man’s height from the ground, is called the Multazam, and here prayer should be offered after the ṭawāf with outstretched arms and breast pressed against the house. On the other side of the door, against the same wall, is a shallow trough, which is said to mark the original site of the stone on which Abraham stood to build the Ka‘ba. Here the growth of the legend can be traced, for the place is now called the “kneading-place” (Ma‘jan), where the cement for the Ka‘ba was prepared. This name and story do not appear in the older accounts. Once more, on the north side of the Ka‘ba, there projects a low semicircular wall of marble, with an opening at each end between it and the walls of the house. The space within is paved with mosaic, and is called the Ḥijr. It is included in the ṭawāf, and two slabs of verde antico within it are called the graves of Ishmael and Hagar, and are places of acceptable prayer. Even the golden or gilded mīzāb (water-spout) that projects into the Ḥijr marks a place where prayer is heard, and another such place is the part of the west wall close to the Yemen corner.
The feeling of religious conservatism which has preserved the structural rudeness of the Ka‘ba did not prohibit costly surface decoration. In Mahomet’s time the outer walls were covered by a veil (or kiswa) of striped Yemen cloth. The caliphs substituted a covering of figured brocade, and the Egyptian government still sends with each pilgrim caravan from Cairo a new kiswa of black brocade, adorned with a broad band embroidered with golden inscriptions from the Korān, as well as a richer curtain for the door.18 The door of two leaves, with its posts and lintel, is of silver gilt.
The interior of the Ka‘ba is now opened but a few times every year for the general public, which ascends by the portable staircase brought forward for the purpose. Foreigners can obtain admission at any time for a special fee. The modern descriptions, from observations made under difficulties, are not very complete. Little change, however, seems to have been made since the time of Ibn Jubair, who describes the floor and walls as overlaid with richly variegated marbles, and the upper half of the walls as plated with silver thickly gilt, while the roof was veiled with coloured silk. Modern writers describe the place as windowless, but Ibn Jubair mentions five windows of rich stained glass from Irāk. Between the three pillars of teak hung thirteen silver lamps. A chest in the corner to the left of one entering contained Korans, and at the Irāk corner a space was cut off enclosing the stair that leads to the roof. The door to this stair (called the door of mercy—Bāb el-Raḥma) was plated with silver by the caliph Motawakkil. Here, in the time of Ibn Jubair, the Maqām or standing stone of Abraham was usually placed for better security, but brought out on great occasions.19
The houses of ancient Mecca pressed close upon the Ka‘ba, the noblest families, who traced their descent from Ḳoṣai, the reputed founder of the city, having their dwellings immediately round the sanctuary. To the north of the Ka‘ba was the Dār el-Nadwa, or place of assembly of the Koreish. The multiplication of pilgrims after Islām soon made it necessary to clear away the nearest dwellings and enlarge the place of prayer around the Ancient House. Omar, Othmān and Ibn Jubair had all a share in this work, but the great founder of the mosque in its present form, with its spacious area and deep colonnades, was the caliph Mahdī, who spent enormous sums in bringing costly pillars from Egypt and Syria. The work was still incomplete at his death in A.D. 785, and was finished in less sumptuous style by his successor. Subsequent repairs and additions, extending down to Turkish times, have left little of Mahdī’s work untouched, though a few of the pillars probably date from his days. There are more than five hundred pillars in all, of very various style and workmanship, and the enclosure—250 paces in length and 200 in breadth, according to Burckhardt’s measurement—is entered by nineteen archways irregularly disposed.
After the Ka‘ba the principal points of interest in the mosque are the well Zamzam and the Maqām Ibrāhīm. The former is a deep shaft enclosed in a massive vaulted building paved with marble, and, according to Mahommedan tradition, is the source (corresponding to the Beer-lahai-roi of Gen. xvi. 14) from which Hagar drew water for her son Ishmael. The legend tells that the well was long covered up and rediscovered by ‘Abd al-Moṭṭalib, the grandfather of the Prophet. Sacred wells are familiar features of Semitic sanctuaries, and Islām, retaining the well, made a quasi-biblical story for it, and endowed its tepid waters with miraculous curative virtues. They are eagerly drunk by the pilgrims, or when poured over the body are held to give a miraculous refreshment after the fatigues of religious exercise; and the manufacture of bottles or jars for carrying the water to distant countries is quite a trade. Ibn Jubair mentions a curious superstition of the Meccans, who believed that the water rose in the shaft at the full moon of the month Shaban. On this occasion a great crowd, especially of young people, thronged round the well with shouts of religious enthusiasm, while the servants of the well dashed buckets of water over their heads. The Maqām of Abraham is also connected with a relic of heathenism, the ancient holy stone which once stood on the Ma‘jan, and is said to bear the prints of the patriarch’s feet. The whole legend of this stone, which is full of miraculous incidents, seems to have arisen from a misconception, the Maqām Ibrāhīm in the Korān meaning the sanctuary itself; but the stone, which is a block about 3 spans in height and 2 in breadth, and in shape “like a potter’s furnace” (Ibn Jubair), is certainly very ancient. No one is now allowed to see it, though the box in which it lies can be seen or touched through a grating in the little chapel that surrounds it. In the middle ages it was sometimes shown, and Ibn Jubair describes the pious enthusiasm with which he drank Zamzam water poured on the footprints. It was covered with inscriptions in an unknown character, one of which was copied by Fākihī in his history of Mecca. To judge by the facsimile in Dozy’s Israeliten te Mekka, the character is probably essentially one with that of the Syrian Safā inscriptions, which extended through the Nejd and into the Ḥejāz.20
Safā and Merwa.—In religious importance these two points or “hills,” connected by the Mas‘ā, stand second only to the Ka‘ba. Safā is an elevated platform surmounted by a triple arch, and approached by a flight of steps.21 It lies south-east of the Ka‘ba, facing the black corner, and 76 paces from the “Gate of Safā,” which is architecturally the chief gate of the mosque. Merwa is a similar platform, formerly covered with a single arch, on the opposite side of the valley. It stands on a spur of the Red Mountain called Jebel Kuayḳian. The course between these two sacred points is 493 paces long, and the religious ceremony called the “sa‘y” consists in traversing it seven times, beginning and ending at Safā. The lowest part of the course, between the so-called green milestones, is done at a run. This ceremony, which, as we shall presently see, is part of the omra, is generally said to be performed in memory of Hagar, who ran to and fro between the two eminences vainly seeking water for her son. The observance, however, is certainly of pagan origin; and at one time there were idols on both the so-called hills (see especially Azraqī, pp. 74, 78).
The Ceremonies and the Pilgrimage.—Before Islām the Ka‘ba was the local sanctuary of the Meccans, where they prayed and did 954 sacrifice, where oaths were administered and hard cases submitted to divine sentence according to the immemorial custom of Semitic shrines. But, besides this, Mecca was already a place of pilgrimage. Pilgrimage with the ancient Arabs was the fulfilment of a vow, which appears to have generally terminated—at least on the part of the well-to-do—in a sacrificial feast. A vow of pilgrimage might be directed to other sanctuaries than Mecca—the technical word for it (ihlāl) is applied, for example, to the pilgrimage to Manāt (Bakri, p. 519). He who was under such a vow was bound by ceremonial observances of abstinence from certain acts (e.g. hunting) and sensual pleasures, and in particular was forbidden to shear or comb his hair till the fulfilment of the vow. This old Semitic usage has its close parallel in the vow of the Nazarite. It was not peculiarly connected with Mecca; at Tāif, for example, it was customary on return to the city after an absence to present oneself at the sanctuary, and there shear the hair (Muh. in Med., p. 381). Pilgrimages to Mecca were not tied to a single time, but they were naturally associated with festive occasions, and especially with the great annual feast and market. The pilgrimage was so intimately connected with the well-being of Mecca, and had already such a hold on the Arabs round about, that Mahomet could not afford to sacrifice it to an abstract purity of religion, and thus the old usages were transplanted into Islām in the double form of the omra or vow of pilgrimage to Mecca, which can be discharged at any time, and the ḥajj or pilgrimage at the great annual feast. The latter closes with a visit to the Ka‘ba, but its essential ceremonies lie outside Mecca, at the neighbouring shrines where the old Arabs gathered before the Meccan fair.
The omra begins at some point outside the Ḥaram (or holy territory), generally at Tanim, both for convenience sake and because Ayesha began the omra there in the year 10 of the Hegira. The pilgrim enters the Ḥaram in the antique and scanty pilgrimage dress (iḥrām), consisting of two cloths wound round his person in a way prescribed by ritual. His devotion is expressed in shouts of “Labbeyka” (a word of obscure origin and meaning); he enters the great mosque, performs the ṭawāf and the sa‘y22 and then has his head shaved and resumes his common dress. This ceremony is now generally combined with the ḥajj, or is performed by every stranger or traveller when he enters Mecca, and the iḥrām (which involves the acts of abstinence already referred to) is assumed at a considerable distance from the city. But it is also proper during one’s residence in the holy city to perform at least one omra from Tanim in connexion with a visit to the mosque of Ayesha there. The triviality of these rites is ill concealed by the legends of the sa‘y of Hagar and of the ṭawāf being first performed by Adam in imitation of the circuit of the angels about the throne of God; the meaning of their ceremonies seems to have been almost a blank to the Arabs before Islām, whose religion had become a mere formal tradition. We do not even know to what deity the worship expressed in the ṭawāf was properly addressed. There is a tradition that the Ka‘ba was a temple of Saturn (Shahrastānī, p. 431); perhaps the most distinctive feature of the shrine may be sought in the sacred doves which still enjoy the protection of the sanctuary. These recall the sacred doves of Ascalon (Philo vi. 200 of Richter’s ed.), and suggests Venus-worship as at least one element (cf. Herod i. 131, iii. 8; Ephr. Syr., Op. Syr. ii. 457).
To the ordinary pilgrim the omra has become so much an episode of the ḥajj that it is described by some European pilgrims as a mere visit to the mosque of Ayesha; a better conception of its original significance is got from the Meccan feast of the seventh month (Rajab), graphically described by Ibn Jubair from his observations in A.D. 1184. Rajab was one of the ancient sacred months, and the feast, which extended through the whole month and was a joyful season of hospitality and thanksgiving, no doubt represents the ancient feasts of Mecca more exactly than the ceremonies of the ḥajj, in which old usage has been overlaid by traditions and glosses of Islām. The omra was performed by crowds from day to day, especially at new and full moon.23 The new moon celebration was nocturnal; the road to Tanim, the Mas‘ā, and the mosque were brilliantly illuminated; and the appearing of the moon was greeted with noisy music. A genuine old Arab market was held, for the wild Bedouins of the Yemen mountains came in thousands to barter their cattle and fruits for clothing, and deemed that to absent themselves would bring drought and cattle plague in their homes. Though ignorant of the legal ritual and prayers, they performed the ṭawāf with enthusiasm, throwing themselves against the Ka‘ba and clinging to its curtains as a child clings to its mother. They also made a point of entering the Ka‘ba. The 29th of the month was the feast day of the Meccan women, when they and their little ones had the Ka‘ba to themselves without the presence even of the Sheybās.
The central and essential ceremonies of the ḥajj or greater pilgrimage are those of the day of Arafa, the 9th of the “pilgrimage month” (Dhu‘l Ḥijja), the last of the Arab year; and every Moslem who is his own master, and can command the necessary means, is bound to join in these once in his life, or to have them fulfilled by a substitute on his behalf and at his expense. By them the pilgrim becomes as pure from sin as when he was born, and gains for the rest of his life the honourable title of ḥajj. Neglect of many other parts of the pilgrim ceremonial may be compensated by offerings, but to miss the “stand” (woqūf) at Arafa is to miss the pilgrimage. Arafa or Arafat is a space, artificially limited, round a small isolated hill called the Hill of Mercy, a little way outside the holy territory, on the road from Mecca to Taif. One leaving Mecca after midday can easily reach the place on foot the same evening. The road is first northwards along the Mecca valley and then turns eastward. It leads through the straggling village of Mina, occupying a long narrow valley (Wādi Mina), two to three hours from Mecca, and thence by the mosque of Mozdalifa over a narrow pass opening out into the plain of Arafa, which is an expansion of the great Wādi Naman, through which the Taif road descends from Mount Kara. The lofty and rugged mountains of the Hodheyl tower over the plain on the north side and overshadow the little Hill of Mercy, which is one of those bosses of weathered granite so common in the Hejāz. Arafa lay quite near Dhul-Majaz, where, according to Arabian tradition, a great fair was held from the 1st to the 8th of the pilgrimage month; and the ceremonies from which the ḥajj was derived were originally an appendix to this fair. Now, on the contrary, the pilgrim is expected to follow as closely as may be the movements of the prophet at his “farewell pilgrimage” in the year 10 of the Hegira (A.D. 632). He therefore leaves Mecca in pilgrim garb on the 8th of Dhu‘l Ḥijja, called the day of tarwīya (an obscure and pre-Islamic name), and, strictly speaking, should spend the night at Mina. It is now, however, customary to go right on and encamp at once at Arafa. The night should be spent in devotion, but the coffee booths do a lively trade, and songs are as common as prayers. Next forenoon the pilgrim is free to move about, and towards midday he may if he please hear a sermon. In the afternoon the essential ceremony begins; it consists simply in “standing” on Arafa shouting “Labbeyka” and reciting prayers and texts till sunset. After the sun is down the vast assemblage breaks up, and a rush (technically ifāḍa, daf‘, nafr) is made in the utmost confusion to Mozdalifa, where the night prayer is said and the night spent. Before sunrise next morning (the 10th) a second “stand” like that on Arafa is made for a short time by torchlight round the mosque of Mozdalifa, but before the sun is fairly up all must be in motion in the second ifāḍa towards Mina. The day thus begun is the “day of sacrifice,” and has four ceremonies—(1) to pelt with seven stones a cairn (jamrat al ‘aqaba) at the eastern end of W. Mina, (2) to slay a victim at Mina and hold a sacrificial meal, part of the flesh being also dried and so preserved, or given to the poor,24 (3) to be shaved and so terminate the iḥrām, (4) to make the third ifāḍa, i.e. go to Mecca and perform the ṭawāf and sa‘y (‘omrat al-ifāḍa), returning thereafter to Mina. The sacrifice and visit to Mecca may, however, be delayed till the 11th, 12th or 13th. These are the days of Mina, a fair and joyous feast, with no special ceremony except that each day the pilgrim is expected to throw seven stones at the jamrat al ‘aqaba, and also at each of two similar cairns in the valley. The stones are thrown in the name of Allah, and are generally thought to be directed at the devil. This is, however, a custom older than Islām, and a tradition in Azraqī, p. 412, represents it as an act of worship to idols at Mina. As the stones are thrown on the days of the fair, it is not unlikely that they have something to do with the old Arab mode of closing a sale by the purchaser throwing a stone (Bīrūnī, p. 328).25 The pilgrims leave Mina on the 12th or 13th, and the ḥajj is then over. (See further Mahommedan Religion.)
The colourless character of these ceremonies is plainly due to the fact that they are nothing more than expurgated heathen rites. In Islām proper they have no raison d’être; the legends about Adam and Eve on Arafa, about Abraham’s sacrifice of the ram at Thabii by Mina, imitated in the sacrifices of the pilgrimage, are clumsy afterthoughts, as appears from their variations and only partial acceptance. It is not so easy to get at the nature of the original rites, which Islām was careful to suppress. But we find mention of practices condemned by the orthodox, or forming no part of the Moslem ritual, which may be regarded as traces of an older ceremonial. Such are nocturnal illuminations at Mina (Ibn Baṭūta i. 396), Arafa and Mozdalifa (Ibn Jubair, 179), and ṭawāfs performed by the ignorant at holy spots at Arafa not recognized by law (Snouck-Hurgronje p. 149 sqq.). We know that the rites at Mozdalifa were originally connected with a holy hill bearing the name of the god Quzah (the Edomite Kozē) whose bow is the rainbow, and there is reason to think that the ifāḍas from Arafa and Quzah, which were not made as now after sunset and before sunrise, but when the sun rested on the tops of the mountains, were ceremonies of farewell and salutation to the sun-god.
The statistics of the pilgrimage cannot be given with certainty and vary much from year to year. The quarantine office keeps a record of arrivals by sea at Jidda (66,000 for 1904); but to these must be added those travelling by land from Cairo, Damascus 955 and Irāk, the pilgrims who reach Medina from Yanbu and go on to Mecca, and those from all parts of the peninsula. Burckhardt in 1814 estimated the crowd at Arafa at 70,000, Burton in 1853 at 50,000, ‘Abd el-Razzāk in 1858 at 60,000. This great assemblage is always a dangerous centre of infection, and the days of Mina especially, spent under circumstances originally adapted only for a Bedouin fair, with no provisions for proper cleanliness, and with the air full of the smell of putrefying offal and flesh drying in the sun, produce much sickness.
Literature.—Besides the Arabic geographers and cosmographers, we have Ibn ‘Abd Rabbih’s description of the mosque, early in the 10th century (‘Iḳd Farīd, Cairo ed., iii. 362 sqq.), but above all the admirable record of Ibn Jubair (A.D. 1184), by far the best account extant of Mecca and the pilgrimage. It has been much pillaged by Ibn Baṭūta. The Arabic historians are largely occupied with fabulous matter as to Mecca before Islām; for these legends the reader may refer to C. de Perceval’s Essai. How little confidence can be placed in the pre-Islamic history appears very clearly from the distorted accounts of Abraha’s excursion against the Hejāz, which fell but a few years before the birth of the Prophet, and is the first event in Meccan history which has confirmation from other sources. See Nöldeke’s version of Ţabarī, p. 204 sqq. For the period of the Prophet, Ibn Hishām and Wāḳidī are valuable sources in topography as well as history. Of the special histories and descriptions of Mecca published by Wüstenfeld (Chroniken der Stadt Mekka, 3 vols., 1857-1859, with an abstract in German, 1861), the most valuable is that of Azraqī. It has passed through the hands of several editors, but the oldest part goes back to the beginning of the 9th Christian century. Kutbeddin’s history (vol. iii. of the Chroniken) goes down with the additions of his nephew to A.D. 1592.
Of European descriptions of Mecca from personal observation the best is Burckhardt’s Travels in Arabia (cited above from the 8vo ed., 1829). The Travels of Aly Bey (Badia, London, 1816) describe a visit in 1807; Burton’s Pilgrimage (3rd ed., 1879) often supplements Burckhardt; Von Maltzan’s Wallfahrt nach Mekka (1865) is lively but very slight. ‘Abd el-Razzāq’s report to the government of India on the pilgrimage of 1858 is specially directed to sanitary questions; C. Snouck-Hurgronje, Mekka (2 vols., and a collection of photographs, The Hague, 1888-1889), gives a description of the Meccan sanctuary and of the public and private life of the Meccans as observed by the author during a sojourn in the holy city in 1884-1885 and a political history of Mecca from native sources from the Hegira till 1884. For the pilgrimage see particularly Snouck-Hurgronje, Het Mekkaansche Feest (Leiden, 1880).
1 A variant of the name Makkah is Bakkah (Sur. iii. 90; Bakrī, 155 seq.). For other names and honorific epithets of the city see Bakrī, ut supra, Azraqī, p. 197, Yāqūt iv. 617 seq. The lists are in part corrupt, and some of the names (Kūthā and ‘Arsh or ‘Ursh, “the huts”) are not properly names of the town as a whole.
2 Mecca, says one of its citizens, in Wāqidī (Kremer’s ed., p. 196, or Muh. in Med. p. 100), is a settlement formed for trade with Syria in summer and Abyssinia in winter, and cannot continue to exist if the trade is interrupted.
3 The details are variously related. See Bīrūnī, p. 328 (E. T., p. 324); Asma‘i in Yāqūt, iii. 705, iv. 416, 421; Azraqī, p. 129 seq.; Bakrī, p. 661. Jebel Kabkab is a great mountain occupying the angle between W. Namān and the plain of Arafa. The peak is due north of Sheddād, the hamlet which Burckhardt (i. 115) calls Shedad. According to Azraqī, p. 80, the last shrine visited was that of the three trees of Uzzā in W. Nakhla.
4 So we are told by Bīrūnī, p. 62 (E. T., 73).
5 Wāqidī, ed. Kremer, pp. 20, 21; Muh. in Med. p. 39.
6 The older fairs were not entirely deserted till the troubles of the last days of the Omayyads (Azraqī, p. 131).
7 This is the cross-road traversed by Burckhardt (i. 109), and described by him as cut through the rocks with much labour.
8 Iṣṭakhrī gives the length of the city proper from north to south as 2 m., and the greatest breadth from the Jiyād quarter east of the great mosque across the valley and up the western slopes as two-thirds of the length.
9 For details as to the ancient quarters of Mecca, where the several families or septs lived apart, see Azraqī, 455 pp. seq., and compare Ya‘qūbī, ed. Juynboll, p. 100. The minor sacred places are described at length by Azraqī and Ibn Jubair. They are either connected with genuine memories of the Prophet and his times, or have spurious legends to conceal the fact that they were originally holy stones, wells, or the like, of heathen sanctity.
10 Balādhurī, in his chapter on the floods of Mecca (pp. 53 seq.), says that ‘Omar built two dams.
11 The aqueduct is the successor of an older one associated with the names of Zobaida, wife of Harūn al-Rashīd, and other benefactors. But the old aqueduct was frequently out of repair, and seems to have played but a secondary part in the medieval water supply. Even the new aqueduct gave no adequate supply in Burckhardt’s time.
12 In Ibn Jubair’s time large supplies were brought from the Yemen mountains.
13 The corruption of manners in Mecca is no new thing. See the letter of the caliph Mahdi on the subject; Wüstenfeld, Chron. Mek., iv. 168.
14 The exact measurements (which, however, vary according to different authorities) are stated to be: sides 37 ft. 2 in. and 38 ft. 4 in.; ends 31 ft. 7 in. and 29 ft.; height 35 ft.
15 The Ka‘ba of Mahomet’s time was the successor of an older building, said to have been destroyed by fire. It was constructed in the still usual rude style of Arabic masonry, with string courses of timber between the stones (like Solomon’s Temple). The roof rested on six pillars; the door was raised above the ground and approached by a stair (probably on account of the floods which often swept the valley); and worshippers left their shoes under the stair before entering. During the first siege of Mecca (A.D. 683), the building was burned down, the Ibn Zubair reconstructed it on an enlarged scale and in better style of solid ashlar-work. After his death his most glaring innovations (the introduction of two doors on a level with the ground, and the extension of the building lengthwise to include the Ḥijr) were corrected by Ḥajjāj, under orders from the caliph, but the building retained its more solid structure. The roof now rested on three pillars, and the height was raised one-half. The Ka‘ba was again entirely rebuilt after the flood of A.D. 1626, but since Ḥajjāj there seem to have been no structural changes.
16 Hobal was set up within the Temple over the pit that contained the sacred treasures. His chief function was connected with the sacred lot to which the Meccans were accustomed to betake themselves in all matters of difficulty.
17 See Ibn Hishām i. 54, Azraḳī p. 80 (‘Uzzā in Baṭn Marr); Yāḳūt iii. 705 (Otheydā); Bar Hebraeus on Psalm xii. 9. Stones worshipped by circling round them bore the name dawār or duwār (Krehl, Rel. d. Araber, p. 69). The later Arabs not unnaturally viewed such cultus as imitated from that of Mecca (Yāqūt iv. 622, cf. Dozy, Israeliten te Mekka, p. 125, who draws very perverse inferences).
18 The old kiswa is removed on the 25th day of the month before the pilgrimage, and fragments of it are bought by the pilgrims as charms. Till the 10th day of the pilgrimage month the Ka‘ba is bare.
19 Before Islām the Ka‘ba was opened every Monday and Thursday; in the time of Ibn Jubair it was opened with considerable ceremony every Monday and Friday, and daily in the month Rajab. But, though prayer within the building is favoured by the example of the Prophet, it is not compulsory on the Moslem, and even in the time of Ibn Baṭūṭa the opportunities of entrance were reduced to Friday and the birthday of the Prophet.
20 See De Vogué, Syrie centrale: inscr. sem.; Lady Anne Blunt Pilgrimage of Nejd, ii., and W. R. Smith, in the Athenaeum, March 20, 1880.
21 Ibn Jubair speaks of fourteen steps, Ali Bey of four, Burckhardt of three. The surrounding ground no doubt has risen so that the old name “hill of Safā” is now inapplicable.
22 The latter perhaps was no part of the ancient omra; see Snouck-Hurgronje, Het Mekkaansche Feest (1880) p. 115 sqq.
23 The 27th was also a great day, but this day was in commemoration of the rebuilding of the Ka‘ba by Ibn Jubair.
24 The sacrifice is not indispensable except for those who can afford it and are combining the hajj with the omra.
25 On the similar pelting of the supposed graves of Abū Lahab and his wife (Ibn Jubair, p. 110) and of Abū Righāl at Mughammas, see Nöldeke’s translation of Tabarī, 208.
MECHANICS. The subject of mechanics may be divided into two parts: (1) theoretical or abstract mechanics, and (2) applied mechanics.
1. Theoretical Mechanics
Historically theoretical mechanics began with the study of practical contrivances such as the lever, and the name mechanics (Gr. τὰ μηχανικά), which might more properly be restricted to the theory of mechanisms, and which was indeed used in this narrower sense by Newton, has clung to it, although the subject has long attained a far wider scope. In recent times it has been proposed to adopt the term dynamics (from Gr. δύναμις force,) as including the whole science of the action of force on bodies, whether at rest or in motion. The subject is usually expounded under the two divisions of statics and kinetics, the former dealing with the conditions of rest or equilibrium and the latter with the phenomena of motion as affected by force. To this latter division the old name of dynamics (in a restricted sense) is still often applied. The mere geometrical description and analysis of various types of motion, apart from the consideration of the forces concerned, belongs to kinematics. This is sometimes discussed as a separate theory, but for our present purposes it is more convenient to introduce kinematical motions as they are required. We follow also the traditional practice of dealing first with statics and then with kinetics. This is, in the main, the historical order of development, and for purposes of exposition it has many advantages. The laws of equilibrium are, it is true, necessarily included as a particular case under those of motion; but there is no real inconvenience in formulating as the basis of statics a few provisional postulates which are afterwards seen to be comprehended in a more general scheme.
The whole subject rests ultimately on the Newtonian laws of motion and on some natural extensions of them. As these laws are discussed under a separate heading (Motion, Laws of), it is here only necessary to indicate the standpoint from which the present article is written. It is a purely empirical one. Guided by experience, we are able to frame rules which enable us to say with more or less accuracy what will be the consequences, or what were the antecedents, of a given state of things. These rules are sometimes dignified by the name of “laws of nature,” but they have relation to our present state of knowledge and to the degree of skill with which we have succeeded in giving more or less compact expression to it. They are therefore liable to be modified from time to time, or to be superseded by more convenient or more comprehensive modes of statement. Again, we do not aim at anything so hopeless, or indeed so useless, as a complete description of any phenomenon. Some features are naturally more important or more interesting to us than others; by their relative simplicity and evident constancy they have the first hold on our attention, whilst those which are apparently accidental and vary from one occasion to another arc ignored, or postponed for later examination. It follows that for the purposes of such description as is possible some process of abstraction is inevitable if our statements are to be simple and definite. Thus in studying the flight of a stone through the air we replace the body in imagination by a mathematical point endowed with a mass-coefficient. The size and shape, the complicated spinning motion which it is seen to execute, the internal strains and vibrations which doubtless take place, are all sacrificed in the mental picture in order that attention may be concentrated on those features of the phenomenon which are in the first place most interesting to us. At a later stage in our subject the conception of the ideal rigid body is introduced; this enables us to fill in some details which were previously wanting, but others are still omitted. Again, the conception of a force as concentrated in a mathematical line is as unreal as that of a mass concentrated in a point, but it is a convenient fiction for our purpose, owing to the simplicity which it lends to our statements.
The laws which are to be imposed on these ideal representations are in the first instance largely at our choice. Any scheme of abstract dynamics constructed in this way, provided it be self-consistent, is mathematically legitimate; but from the physical point of view we require that it should help us to picture the sequence of phenomena as they actually occur. Its success or failure in this respect can only be judged a posteriori by comparison of the results to which it leads with the facts. It is to be noticed, moreover, that all available tests apply only to the scheme as a whole; owing to the complexity of phenomena we cannot submit any one of its postulates to verification apart from the rest.
It is from this point of view that the question of relativity of motion, which is often felt to be a stumbling-block on the very threshold of the subject, is to be judged. By “motion” we mean of necessity motion relative to some frame of reference which is conventionally spoken of as “fixed.” In the earlier stages of our subject this may be any rigid, or apparently rigid, structure fixed relatively to the earth. If we meet with phenomena which do not fit easily into this view, we have the alternatives either to modify our assumed laws of motion, or to call to our aid adventitious forces, or to examine whether the discrepancy can be reconciled by the simpler expedient of a new basis of reference. It is hardly necessary to say that the latter procedure has hitherto been found to be adequate. As a first step we adopt a system of rectangular axes whose origin is fixed in the earth, but whose directions are fixed by relation to the stars; in the planetary theory the origin is transferred to the sun, and afterwards to the mass-centre of the solar system; and so on. At each step there is a gain in accuracy and comprehensiveness; and the conviction is cherished that some system of rectangular axes exists with respect to which the Newtonian scheme holds with all imaginable accuracy.
A similar account might be given of the conception of time as a measurable quantity, but the remarks which it is necessary to make under this head will find a place later.
The following synopsis shows the scheme on which the treatment is based:—
| Part 1.—Statics. | |
| 1. | Statics of a particle. |
| 2. | Statics of a system of particles. |
| 3. | Plane kinematics of a rigid body. |
| 4. | Plane statics. |
| 5. | Graphical statics. |
| 6. | Theory of frames. |
| 7. | Three-dimensional kinematics of a rigid body. |
| 8. | Three-dimensional statics. |
| 9. | Work. |
| 10. | Statics of inextensible chains. |
| 11. | Theory of mass-systems. |
| Part 2.—Kinetics. | |
| 12. | Rectilinear motion. |
| 13. | General motion of a particle. |
| 14. | Central forces. Hodograph. |
| 15. | Kinetics of a system of discrete particles. |
| 16. | Kinetics of a rigid body. Fundamental principles. |
| 17. | Two-dimensional problems. |
| 18. | Equations of motion in three dimensions. |
| 19. | Free motion of a solid. |
| 20. | Motion of a solid of revolution. |
| 21. | Moving axes of reference. |
| 22. | Equations of motion in generalized co-ordinates. |
| 23. | Stability of equilibrium. Theory of vibrations. |
Part I.—Statics
§ 1. Statics of a Particle.—By a particle is meant a body whose position can for the purpose in hand be sufficiently specified by a mathematical point. It need not be “infinitely small,” or even small compared with ordinary standards; thus in astronomy such vast bodies as the sun, the earth, and the other planets can for many purposes be treated merely as points endowed with mass.
A force is conceived as an effort having a certain direction and a certain magnitude. It is therefore adequately represented, for mathematical purposes, by a straight line AB drawn in the direction in question, of length proportional (on any convenient scale) to the magnitude of the force. In other words, a force is mathematically of the nature of a “vector” (see Vector Analysis, Quaternions). In most questions of pure statics we are concerned only with the ratios of the various forces which enter into the problem, so that it is indifferent what unit of force is adopted. For many purposes a gravitational system of measurement is most natural; thus we speak of a force of so many pounds or so many kilogrammes. The “absolute” system of measurement will be referred to below in Part II., Kinetics. It is to be remembered that all “force” is of the nature of a push or a pull, and that according to the accepted terminology of modern mechanics such phrases as “force of inertia,” “accelerating force,” “moving force,” once classical, are proscribed. This rigorous limitation of the meaning of the word is of comparatively recent origin, and it is perhaps to be regretted that some more technical term has not been devised, but the convention must now be regarded as established.
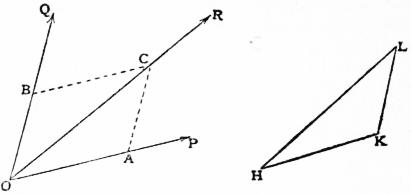 |
| Fig. 1. |
The fundamental postulate of this part of our subject is that the two forces acting on a particle may be compounded by the “parallelogram rule.” Thus, if the two forces P,Q be represented by the lines OA, OB, they can be replaced by a single force R represented by the diagonal OC of the parallelogram determined by OA, OB. This is of course a physical assumption whose propriety is justified solely by experience. We shall see later that it is implied in Newton’s statement of his Second Law of motion. In modern language, forces are compounded by “vector-addition”; thus, if we draw in succession vectors HK>, KL> to represent P, Q, the force R is represented by the vector HL> which is the “geometric sum” of HK>, KL>.
By successive applications of the above rule any number of forces acting on a particle may be replaced by a single force which is the vector-sum of the given forces: this single force is called the resultant. Thus if AB>, BC>, CD> ..., HK> be vectors representing the given forces, the resultant will be given by AK>. It will be understood that the figure ABCD ... K need not be confined to one plane.
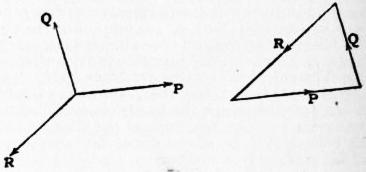 |
| Fig. 2. |
If, in particular, the point K coincides with A, so that the resultant vanishes, the given system of forces is said to be in equilibrium—i.e. the particle could remain permanently at rest under its action. This is the proposition known as the polygon of forces. In the particular case of three forces it reduces to the triangle of forces, viz. “If three forces acting on a particle are represented as to magnitude and direction by the sides of a triangle taken in order, they are in equilibrium.”
A sort of converse proposition is frequently useful, viz. if three forces acting on a particle be in equilibrium, and any triangle be constructed whose sides are respectively parallel to the forces, the magnitudes of the forces will be to one another as the corresponding sides of the triangle. This follows from the fact that all such triangles are necessarily similar.
 |
| Fig. 3. |
As a simple example of the geometrical method of treating statical problems we may consider the equilibrium of a particle on a “rough” inclined plane. The usual empirical law of sliding friction is that the mutual action between two plane surfaces in contact, or between a particle and a curve or surface, cannot make with the normal an angle exceeding a certain limit λ called the angle of friction. If the conditions of equilibrium require an obliquity greater than this, sliding will take place. The precise value of λ will vary with the nature and condition of the surfaces in contact. In the case of a body simply resting on an inclined plane, the reaction must of course be vertical, for equilibrium, and the slope α of the plane must therefore not exceed λ. For this reason λ is also known as the angle of repose. If α > λ, a force P must be applied in order to maintain equilibrium; let θ be the inclination of P to the plane, as shown in the left-hand diagram. The relations between this force P, the gravity W of the body, and the reaction S of the plane are then determined by a triangle of forces HKL. Since the inclination of S to the normal cannot exceed λ on either side, the value of P must lie between two limits which are represented by L1H, L2H, in the right-hand diagram. Denoting these limits by P1, P2, we have
P1/W = L1H/HK = sin (α − λ)/cos (θ + λ),
P2/W = L2H/HK = sin (α + λ)/cos (θ − λ).
It appears, moreover, that if θ be varied P will be least when L1H is at right angles to KL1, in which case P1 = W sin (α − λ), corresponding to θ = −λ.
 |
Just as two or more forces can be combined into a single resultant, so a single force may be resolved into components 957 acting in assigned directions. Thus a force can be uniquely resolved into two components acting in two assigned directions in the same plane with it by an inversion of the parallelogram construction of fig. 1. If, as is usually most convenient, the two assigned directions are at right angles, the two components of a force P will be P cos θ, P sin θ, where θ is the inclination of P to the direction of the former component. This leads to formulae for the analytical reduction of a system of coplanar forces acting on a particle. Adopting rectangular axes Ox, Oy, in the plane of the forces, and distinguishing the various forces of the system by suffixes, we can replace the system by two forces X, Y, in the direction of co-ordinate axes; viz.—
X = P1 cos θ1 + P2 cos θ2 + ... = Σ (P cos θ),
Y = P1 sin θ1 + P2 sin θ2 + ... = Σ (P sin θ).
These two forces X, Y, may be combined into a single resultant R making an angle φ with Ox, provided
X = R cos φ, Y = R sin φ,
whence
R2 = X2 + Y2, tan φ = Y/X.
For equilibrium we must have R = 0, which requires X = 0, Y = 0; in words, the sum of the components of the system must be zero for each of two perpendicular directions in the plane.
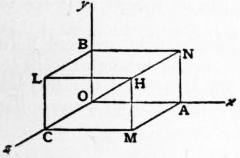 |
| Fig. 5. |
A similar procedure applies to a three-dimensional system. Thus if, O being the origin, OH> represent any force P of the system, the planes drawn through H parallel to the co-ordinate planes will enclose with the latter a parallelepiped, and it is evident that OH> is the geometric sum of OA>, AN>, NH>, or OA>, OB>, OC>, in the figure. Hence P is equivalent to three forces Pl, Pm, Pn acting along Ox, Oy, Oz, respectively, where l, m, n, are the “direction-ratios” of OH>. The whole system can be reduced in this way to three forces
X = Σ (Pl), Y = Σ (Pm), Z = Σ (Pn),
acting along the co-ordinate axes. These can again be combined into a single resultant R acting in the direction (λ, μ, ν), provided
X = Rλ, Y = Rμ, Z = Rν.
If the axes are rectangular, the direction-ratios become direction-cosines, so that λ2 + μ2 + ν2 = 1, whence
R2 = X2 + Y2 + Z2.
The conditions of equilibrium are X = 0, Y = 0, Z = 0.
§ 2. Statics of a System of Particles.—We assume that the mutual forces between the pairs of particles, whatever their nature, are subject to the “Law of Action and Reaction” (Newton’s Third Law); i.e. the force exerted by a particle A on a particle B, and the force exerted by B on A, are equal and opposite in the line AB. The problem of determining the possible configurations of equilibrium of a system of particles subject to extraneous forces which are known functions of the positions of the particles, and to internal forces which are known functions of the distances of the pairs of particles between which they act, is in general determinate. For if n be the number of particles, the 3n conditions of equilibrium (three for each particle) are equal in number to the 3n Cartesian (or other) co-ordinates of the particles, which are to be found. If the system be subject to frictionless constraints, e.g. if some of the particles be constrained to lie on smooth surfaces, or if pairs of particles be connected by inextensible strings, then for each geometrical relation thus introduced we have an unknown reaction (e.g. the pressure of the smooth surface, or the tension of the string), so that the problem is still determinate.
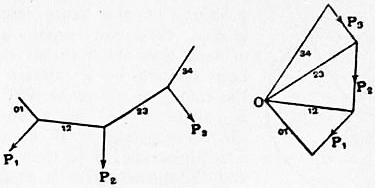 |
| Fig. 6. |
 |
| Fig. 7. |
 |
| Fig. 8. |
The case of the funicular polygon will be of use to us later. A number of particles attached at various points of a string are acted on by given extraneous forces P1, P2, P3 ... respectively. The relation between the three forces acting on any particle, viz. the extraneous force and the tensions in the two adjacent portions of the string can be exhibited by means of a triangle of forces; and if the successive triangles be drawn to the same scale they can be fitted together so as to constitute a single force-diagram, as shown in fig. 6. This diagram consists of a polygon whose successive sides represent the given forces P1, P2, P3 ..., and of a series of lines connecting the vertices with a point O. These latter lines measure the tensions in the successive portions of string. As a special, but very important case, the forces P1, P2, P3 ... may be parallel, e.g. they may be the weights of the several particles. The polygon of forces is then made up of segments of a vertical line. We note that the tensions have now the same horizontal projection (represented by the dotted line in fig. 7). It is further of interest to note that if the weights be all equal, and at equal horizontal intervals, the vertices of the funicular will lie on a parabola whose axis is vertical. To prove this statement, let A, B, C, D ... be successive vertices, and let H, K ... be the middle points of AC, BD ...; then BH, CK ... will be vertical by the hypothesis, and since the geometric sum of BA>, BC> is represented by 2BH>, the tension in BA: tension in BC: weight at B
as BA : BC : 2BH.
The tensions in the successive portions of the string are therefore proportional to the respective lengths, and the lines BH, CK ... are all equal. Hence AD, BC are parallel and are bisected by the same vertical line; and a parabola with vertical axis can therefore be described through A, B, C, D. The same holds for the four points B, C, D, E and so on; but since a parabola is uniquely determined by the direction of its axis and by three points on the curve, the successive parabolas ABCD, BCDE, CDEF ... must be coincident.
§ 3. Plane Kinematics of a Rigid Body.—The ideal rigid body is one in which the distance between any two points is invariable. For the present we confine ourselves to the consideration of displacements in two dimensions, so that the body is adequately represented by a thin lamina or plate.
 |
| Fig. 9. |
The position of a lamina movable in its own plane is determinate when we know the positions of any two points A, B of it. Since the four co-ordinates (Cartesian or other) of these two points are connected by the relation which expresses the invariability of the length AB, it is plain that virtually three independent elements are required and suffice to specify the position of the lamina. For instance, the lamina may in general be fixed by connecting any three points of it by rigid links to three fixed points in its plane. The three independent elements may be chosen in a variety of ways (e.g. they may be the lengths 958 of the three links in the above example). They may be called (in a generalized sense) the co-ordinates of the lamina. The lamina when perfectly free to move in its own plane is said to have three degrees of freedom.
 |
| Fig. 10. |
 |
| Fig. 11. |
By a theorem due to M. Chasles any displacement whatever of the lamina in its own plane is equivalent to a rotation about some finite or infinitely distant point J. For suppose that in consequence of the displacement a point of the lamina is brought from A to B, whilst the point of the lamina which was originally at B is brought to C. Since AB, BC, are two different positions of the same line in the lamina they are equal, and it is evident that the rotation could have been effected by a rotation about J, the centre of the circle ABC, through an angle AJB. As a special case the three points A, B, C may be in a straight line; J is then at infinity and the displacement is equivalent to a pure translation, since every point of the lamina is now displaced parallel to AB through a space equal to AB.
Next, consider any continuous motion of the lamina. The latter may be brought from any one of its positions to a neighbouring one by a rotation about the proper centre. The limiting position J of this centre, when the two positions are taken infinitely close to one another, is called the instantaneous centre. If P, P′ be consecutive positions of the same point, and δθ the corresponding angle of rotation, then ultimately PP′ is at right angles to JP and equal to JP·δθ. The instantaneous centre will have a certain locus in space, and a certain locus in the lamina. These two loci are called pole-curves or centrodes, and are sometimes distinguished as the space-centrode and the body-centrode, respectively. In the continuous motion in question the latter curve rolls without slipping on the former (M. Chasles). Consider in fact any series of successive positions 1, 2, 3... of the lamina (fig. 11); and let J12, J23, J34... be the positions in space of the centres of the rotations by which the lamina can be brought from the first position to the second, from the second to the third, and so on. Further, in the position 1, let J12, J′23, J′34 ... be the points of the lamina which have become the successive centres of rotation. The given series of positions will be assumed in succession if we imagine the lamina to rotate first about J12 until J′23 comes into coincidence with J23, then about J23 until J′34 comes into coincidence with J34, and so on. This is equivalent to imagining the polygon J12 J′23 J′34 ..., supposed fixed in the lamina, to roll on the polygon J12 J23 J34 ..., which is supposed fixed in space. By imagining the successive positions to be taken infinitely close to one another we derive the theorem stated. The particular case where both centrodes are circles is specially important in mechanism.
 |
| Fig. 12. |
 |
| Fig. 13. |
The theory may be illustrated by the case of “three-bar motion.” Let ABCD be any quadrilateral formed of jointed links. If, AB being held fixed, the quadrilateral be slightly deformed, it is obvious that the instantaneous centre J will be at the intersection of the straight lines AD, BC, since the displacements of the points D, C are necessarily at right angles to AD, BC, respectively. Hence these displacements are proportional to JD, JC, and therefore to DD′ CC′, where C′D′ is any line drawn parallel to CD, meeting BC, AD in C′, D′, respectively. The determination of the centrodes in three-bar motion is in general complicated, but in one case, that of the “crossed parallelogram” (fig. 13), they assume simple forms. We then have AB = DC and AD = BC, and from the symmetries of the figure it is plain that
AJ + JB = CJ + JD = AD.
Hence the locus of J relative to AB, and the locus relative to CD are equal ellipses of which A, B and C, D are respectively the foci. It may be noticed that the lamina in fig. 9 is not, strictly speaking, fixed, but admits of infinitesimal displacement, whenever the directions of the three links are concurrent (or parallel).
The matter may of course be treated analytically, but we shall only require the formula for infinitely small displacements. If the origin of rectangular axes fixed in the lamina be shifted through a space whose projections on the original directions of the axes are λ, μ, and if the axes are simultaneously turned through an angle ε, the co-ordinates of a point of the lamina, relative to the original axes, are changed from x, y to λ + x cos ε − y sin ε, μ + x sin ε + y cos ε, or λ + x − yε, μ + xε + y, ultimately. Hence the component displacements are ultimately
δx = λ − yε, δy = μ + xε
If we equate these to zero we get the co-ordinates of the instantaneous centre.
§ 4. Plane Statics.—The statics of a rigid body rests on the following two assumptions:—
(i) A force may be supposed to be applied indifferently at any point in its line of action. In other words, a force is of the nature of a “bound” or “localized” vector; it is regarded as resident in a certain line, but has no special reference to any particular point of the line.
(ii) Two forces in intersecting lines may be replaced by a force which is their geometric sum, acting through the intersection. The theory of parallel forces is included as a limiting case. For if O, A, B be any three points, and m, n any scalar quantities, we have in vectors
m · OA> + n · OB> = (m + n) OC>,
provided
m · CA> + n · CB> = 0.
Hence if forces P, Q act in OA, OB, the resultant R will pass through C, provided
m = P/OA, n = Q/OB;
also
R = P·OC/OA + Q·OC/OB,
and
P · AC : Q·CB = OA : OB.
These formulae give a means of constructing the resultant by means of any transversal AB cutting the lines of action. If we now imagine the point O to recede to infinity, the forces P, Q and the resultant R are parallel, and we have
R = P + Q, P·AC = Q·CB.
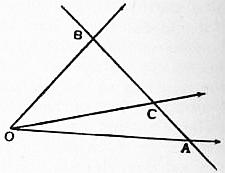 |
| Fig. 14. |
When P, Q have opposite signs the point C divides AB externally on the side of the greater force. The investigation fails when P + Q = 0, since it leads to an infinitely small resultant acting in an infinitely distant line. A combination of two equal, parallel, but oppositely directed forces cannot in fact be replaced by anything simpler, and must therefore be recognized as an independent entity in statics. It was called by L. Poinsot, who first systematically investigated its properties, a couple.
We now restrict ourselves for the present to the systems of forces in one plane. By successive applications of (ii) any 959 such coplanar system can in general be reduced to a single resultant acting in a definite line. As exceptional cases the system may reduce to a couple, or it may be in equilibrium.
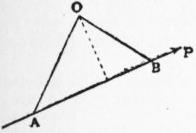 |
| Fig. 15. |
 |
| Fig. 16. |
The moment of a force about a point O is the product of the force into the perpendicular drawn to its line of action from O, this perpendicular being reckoned positive or negative according as O lies on one side or other of the line of action. If we mark off a segment AB along the line of action so as to represent the force completely, the moment is represented as to magnitude by twice the area of the triangle OAB, and the usual convention as to sign is that the area is to be reckoned positive or negative according as the letters O, A, B, occur in “counter-clockwise” or “clockwise” order.
The sum of the moments of two forces about any point O is equal to the moment of their resultant (P. Varignon, 1687). Let AB, AC (fig. 16) represent the two forces, AD their resultant; we have to prove that the sum of the triangles OAB, OAC is equal to the triangle OAD, regard being had to signs. Since the side OA is common, we have to prove that the sum of the perpendiculars from B and C on OA is equal to the perpendicular from D on OA, these perpendiculars being reckoned positive or negative according as they lie to the right or left of AO. Regarded as a statement concerning the orthogonal projections of the vectors AB> and AC> (or BD), and of their sum AD>, on a line perpendicular to AO, this is obvious.
It is now evident that in the process of reduction of a coplanar system no change is made at any stage either in the sum of the projections of the forces on any line or in the sum of their moments about any point. It follows that the single resultant to which the system in general reduces is uniquely determinate, i.e. it acts in a definite line and has a definite magnitude and sense. Again it is necessary and sufficient for equilibrium that the sum of the projections of the forces on each of two perpendicular directions should vanish, and (moreover) that the sum of the moments about some one point should be zero. The fact that three independent conditions must hold for equilibrium is important. The conditions may of course be expressed in different (but equivalent) forms; e.g. the sum of the moments of the forces about each of the three points which are not collinear must be zero.
 |
| Fig. 17. |
The particular case of three forces is of interest. If they are not all parallel they must be concurrent, and their vector-sum must be zero. Thus three forces acting perpendicular to the sides of a triangle at the middle points will be in equilibrium provided they are proportional to the respective sides, and act all inwards or all outwards. This result is easily extended to the case of a polygon of any number of sides; it has an important application in hydrostatics.
Again, suppose we have a bar AB resting with its ends on two smooth inclined planes which face each other. Let G be the centre of gravity (§ 11), and let AG = a, GB = b. Let α, β be the inclinations of the planes, and θ the angle which the bar makes with the vertical. The position of equilibrium is determined by the consideration that the reactions at A and B, which are by hypothesis normal to the planes, must meet at a point J on the vertical through G. Hence
JG/a = sin (θ − α) / sin α, JG/b = sin (θ + β) / sin β,
whence
| cot θ = | a cot α − b cot β | . |
| a + b |
If the bar is uniform we have a = b, and
cot θ = 1⁄2 (cot α − cot β).
The problem of a rod suspended by strings attached to two points of it is virtually identical, the tensions of the strings taking the place of the reactions of the planes.
 |
| Fig. 18. |
Just as a system of forces is in general equivalent to a single force, so a given force can conversely be replaced by combinations of other forces, in various ways. For instance, a given force (and consequently a system of forces) can be replaced in one and only one way by three forces acting in three assigned straight lines, provided these lines be not concurrent or parallel. Thus if the three lines form a triangle ABC, and if the given force F meet BC in H, then F can be resolved into two components acting in HA, BC, respectively. And the force in HA can be resolved into two components acting in BC, CA, respectively. A simple graphical construction is indicated in fig. 19, where the dotted lines are parallel. As an example, any system of forces acting on the lamina in fig. 9 is balanced by three determinate tensions (or thrusts) in the three links, provided the directions of the latter are not concurrent.
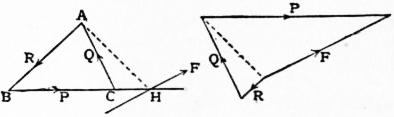 |
| Fig. 19. |
If P, Q, R, be any three forces acting along BC, CA, AB, respectively, the line of action of the resultant is determined by the consideration that the sum of the moments about any point on it must vanish. Hence in “trilinear” co-ordinates, with ABC as fundamental triangle, its equation is Pα + Qβ + Rγ = 0. If P : Q : R = a : b : c, where a, b, c are the lengths of the sides, this becomes the “line at infinity,” and the forces reduce to a couple.
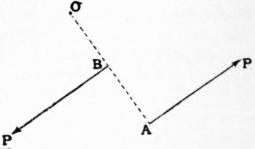 |
| Fig. 20. |
The sum of the moments of the two forces of a couple is the same about any point in the plane. Thus in the figure the sum of the moments about O is P·OA − P·OB or P·AB, which is independent of the position of O. This sum is called the moment of the couple; it must of course have the proper sign attributed to it. It easily follows that any two couples of the same moment are equivalent, and that any number of couples can be replaced by a single couple whose moment is the sum of their moments. Since a couple is for our purposes sufficiently represented by its moment, it has been proposed to substitute the name torque (or twisting effort), as free from the suggestion of any special pair of forces.
A system of forces represented completely by the sides of a plane polygon taken in order is equivalent to a couple whose 960 moment is represented by twice the area of the polygon; this is proved by taking moments about any point. If the polygon intersects itself, care must be taken to attribute to the different parts of the area their proper signs.
 |
| Fig. 21. |
Again, any coplanar system of forces can be replaced by a single force R acting at any assigned point O, together with a couple G. The force R is the geometric sum of the given forces, and the moment (G) of the couple is equal to the sum of the moments of the given forces about O. The value of G will in general vary with the position of O, and will vanish when O lies on the line of action of the single resultant.
 |
| Fig. 22. |
The formal analytical reduction of a system of coplanar forces is as follows. Let (x1, y1), (x2, y2), ... be the rectangular co-ordinates of any points A1, A2, ... on the lines of action of the respective forces. The force at A1 may be replaced by its components X1, Y1, parallel to the co-ordinate axes; that at A2 by its components X2, Y2, and so on. Introducing at O two equal and opposite forces ±X1 in Ox, we see that X1 at A1 may be replaced by an equal and parallel force at O together with a couple −y1X1. Similarly the force Y1 at A1 may be replaced by a force Y1 at O together with a couple x1Y1. The forces X1, Y1, at O can thus be transferred to O provided we introduce a couple x1Y1 − y1X1. Treating the remaining forces in the same way we get a force X1 + X2 + ... or Σ(X) along Ox, a force Y1 + Y2 + ... or Σ(Y) along Oy, and a couple (x1Y1 − y1X1) + (x2Y2 − y2X2) + ... or Σ(xY − yX). The three conditions of equilibrium are therefore
Σ(X) = 0, Σ(Y) = 0, Σ(xY − yX) = 0.
If O′ be a point whose co-ordinates are (ξ, η), the moment of the couple when the forces are transferred to O′ as a new origin will be Σ{(x − ξ) Y − (y − η) X}. This vanishes, i.e. the system reduces to a single resultant through O′, provided
−ξ·Σ(Y) + η·Σ(X) + Σ(xY − yX) = 0.
If ξ, η be regarded as current co-ordinates, this is the equation of the line of action of the single resultant to which the system is in general reducible.
If the forces are all parallel, making say an angle θ with Ox, we may write X1 = P1 cos θ, Y1 = P1 sin θ, X2 = P2 cos θ, Y2 = P2 sin θ, .... The equation (9) then becomes
{Σ(xP) − ξ·Σ(P)} sin θ − {Σ(yP) − η·Σ(P)} cos θ = 0.
If the forces P1, P2, ... be turned in the same sense through the same angle about the respective points A1, A2, ... so as to remain parallel, the value of θ is alone altered, and the resultant Σ(P) passes always through the point
| x = | Σ(xP) | , y = | Σ(yP) | , |
| Σ(P) | Σ(P) |
which is determined solely by the configuration of the points A1, A2, ... and by the ratios P1 : P2 : ... of the forces acting at them respectively. This point is called the centre of the given system of parallel forces; it is finite and determinate unless Σ(P) = 0. A geometrical proof of this theorem, which is not restricted to a two-dimensional system, is given later (§ 11). It contains the theory of the centre of gravity as ordinarily understood. For if we have an assemblage of particles whose mutual distances are small compared with the dimensions of the earth, the forces of gravity on them constitute a system of sensibly parallel forces, sensibly proportional to the respective masses. If now the assemblage be brought into any other position relative to the earth, without alteration of the mutual distances, this is equivalent to a rotation of the directions of the forces relatively to the assemblage, the ratios of the forces remaining unaltered. Hence there is a certain point, fixed relatively to the assemblage, through which the resultant of gravitational action always passes; this resultant is moreover equal to the sum of the forces on the several particles.
 |
| Fig. 23. |
The theorem that any coplanar system of forces can be reduced to a force acting through any assigned point, together with a couple, has an important illustration in the theory of the distribution of shearing stress and bending moment in a horizontal beam, or other structure, subject to vertical extraneous forces. If we consider any vertical section P, the forces exerted across the section by the portion of the structure on one side on the portion on the other may be reduced to a vertical force F at P and a couple M. The force measures the shearing stress, and the couple the bending moment at P; we will reckon these quantities positive when the senses are as indicated in the figure.
If the remaining forces acting on the portion of the structure on either side of P are known, then resolving vertically we find F, and taking moments about P we find M. Again if PQ be any segment of the beam which is free from load, Q lying to the right of P, we find
FP = FQ, MP − MQ = −F·PQ;
hence F is constant between the loads, whilst M decreases as we travel to the right, with a constant gradient −F. If PQ be a short segment containing an isolated load W, we have
FQ − FP = −W, MQ = MP;
 |
| Fig. 24. |
hence F is discontinuous at a concentrated load, diminishing by an amount equal to the load as we pass the loaded point to the right, whilst M is continuous. Accordingly the graph of F for any system of isolated loads will consist of a series of horizontal lines, whilst that of M will be a continuous polygon.
To pass to the case of continuous loads, let x be measured horizontally along the beam to the right. The load on an element δx of the beam may be represented by wδx, where w is in general a function of x. The equations (12) are now replaced by
δF = −wδx, δM = −Fδx,
whence
FQ − FP = − ∫QP w dx, MQ − MP = − ∫QP F dx.
 |
| Fig. 25. |
The latter relation shows that the bending moment varies as the area cut off by the ordinate in the graph of F. In the case of uniform load we have
F = −wx + A, M = 1⁄2wx2 − Ax + B,
where the arbitrary constants A,B are to be determined by the conditions of the special problem, e.g. the conditions at the ends of the beam. The graph of F is a straight line; that of M is a parabola with vertical axis. In all cases the graphs due to different distributions of load may be superposed. The figure shows the case of a uniform heavy beam supported at its ends.
 |
| Fig. 26. |
§ 5. Graphical Statics.—A graphical method of reducing a plane system of forces was introduced by C. Culmann (1864). It involves the construction of two figures, a force-diagram and a funicular polygon. The force-diagram is constructed by placing end to end a series of vectors representing the given forces in 961 magnitude and direction, and joining the vertices of the polygon thus formed to an arbitrary pole O. The funicular or link polygon has its vertices on the lines of action of the given forces, and its sides respectively parallel to the lines drawn from O in the force-diagram; in particular, the two sides meeting in any vertex are respectively parallel to the lines drawn from O to the ends of that side of the force-polygon which represents the corresponding force. The relations will be understood from the annexed diagram, where corresponding lines in the force-diagram (to the right) and the funicular (to the left) are numbered similarly. The sides of the force-polygon may in the first instance be arranged in any order; the force-diagram can then be completed in a doubly infinite number of ways, owing to the arbitrary position of O; and for each force-diagram a simply infinite number of funiculars can be drawn. The two diagrams being supposed constructed, it is seen that each of the given systems of forces can be replaced by two components acting in the sides of the funicular which meet at the corresponding vertex, and that the magnitudes of these components will be given by the corresponding triangle of forces in the force-diagram; thus the force 1 in the figure is equivalent to two forces represented by 01 and 12. When this process of replacement is complete, each terminated side of the funicular is the seat of two forces which neutralize one another, and there remain only two uncompensated forces, viz., those resident in the first and last sides of the funicular. If these sides intersect, the resultant acts through the intersection, and its magnitude and direction are given by the line joining the first and last sides of the force-polygon (see fig. 26, where the resultant of the four given forces is denoted by R). As a special case it may happen that the force-polygon is closed, i.e. its first and last points coincide; the first and last sides of the funicular will then be parallel (unless they coincide), and the two uncompensated forces form a couple. If, however, the first and last sides of the funicular coincide, the two outstanding forces neutralize one another, and we have equilibrium. Hence the necessary and sufficient conditions of equilibrium are that the force-polygon and the funicular should both be closed. This is illustrated by fig. 26 if we imagine the force R, reversed, to be included in the system of given forces.
It is evident that a system of jointed bars having the shape of the funicular polygon would be in equilibrium under the action of the given forces, supposed applied to the joints; moreover any bar in which the stress is of the nature of a tension (as distinguished from a thrust) might be replaced by a string. This is the origin of the names “link-polygon” and “funicular” (cf. § 2).
If funiculars be drawn for two positions O, O′ of the pole in the force-diagram, their corresponding sides will intersect on a straight line parallel to OO′. This is essentially a theorem of projective geometry, but the following statical proof is interesting. Let AB (fig. 27) be any side of the force-polygon, and construct the corresponding portions of the two diagrams, first with O and then with O′ as pole. The force corresponding to AB may be replaced by the two components marked x, y; and a force corresponding to BA may be represented by the two components marked x′, y′. Hence the forces x, y, x′, y′ are in equilibrium. Now x, x′ have a resultant through H, represented in magnitude and direction by OO′, whilst y, y′ have a resultant through K represented in magnitude and direction by O′O. Hence HK must be parallel to OO′. This theorem enables us, when one funicular has been drawn, to construct any other without further reference to the force-diagram.
 |
| Fig. 27. |
The complete figures obtained by drawing first the force-diagrams of a system of forces in equilibrium with two distinct poles O, O′, and secondly the corresponding funiculars, have various interesting relations. In the first place, each of these figures may be conceived as an orthogonal projection of a closed plane-faced polyhedron. As regards the former figure this is evident at once; viz. the polyhedron consists of two pyramids with vertices represented by O, O′, and a common base whose perimeter is represented by the force-polygon (only one of these is shown in fig. 28). As regards the funicular diagram, let LM be the line on which the pairs of corresponding sides of the two polygons meet, and through it draw any two planes ω, ω′. Through the vertices A, B, C, ... and A′, B′, C′, ... of the two funiculars draw normals to the plane of the diagram, to meet ω and ω′ respectively. The points thus obtained are evidently the vertices of a polyhedron with plane faces.
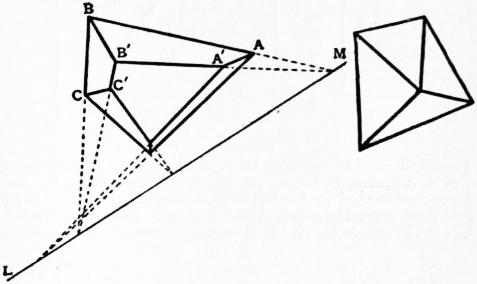 |
| Fig. 28. |
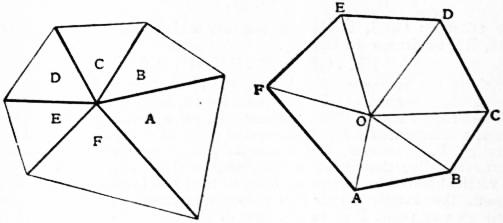 |
| Fig. 29. |
To every line in either of the original figures corresponds of course a parallel line in the other; moreover, it is seen that concurrent lines in either figure correspond to lines forming a closed polygon in the other. Two plane figures so related are called reciprocal, since the properties of the first figure in relation to the second are the same as those of the second with respect to the first. A still simpler instance of reciprocal figures is supplied by the case of concurrent forces in equilibrium (fig. 29). The theory of these reciprocal figures was first studied by J. Clerk Maxwell, who showed amongst other things that a reciprocal can always be drawn to any figure which is the orthogonal projection of a plane-faced polyhedron. If in fact we take the pole of each face of such a polyhedron with respect to a paraboloid of revolution, these poles will be the vertices of a second polyhedron whose edges are the “conjugate lines” of those of the former. If we project both polyhedra orthogonally on a plane perpendicular to the axis of the paraboloid, we obtain two figures which are reciprocal, except that corresponding lines are orthogonal instead of parallel. Another proof will be indicated later (§ 8) in connexion with the properties of the linear complex. It is 962 convenient to have a notation which shall put in evidence the reciprocal character. For this purpose we may designate the points in one figure by letters A, B, C, ... and the corresponding polygons in the other figure by the same letters; a line joining two points A, B in one figure will then correspond to the side common to the two polygons A, B in the other. This notation was employed by R. H. Bow in connexion with the theory of frames (§ 6, and see also Applied Mechanics below) where reciprocal diagrams are frequently of use (cf. Diagram).
When the given forces are all parallel, the force-polygon consists of a series of segments of a straight line. This case has important practical applications; for instance we may use the method to find the pressures on the supports of a beam loaded in any given manner. Thus if AB, BC, CD represent the given loads, in the force-diagram, we construct the sides corresponding to OA, OB, OC, OD in the funicular; we then draw the closing line of the funicular polygon, and a parallel OE to it in the force diagram. The segments DE, EA then represent the upward pressures of the two supports on the beam, which pressures together with the given loads constitute a system of forces in equilibrium. The pressures of the beam on the supports are of course represented by ED, AE. The two diagrams are portions of reciprocal figures, so that Bow’s notation is applicable.
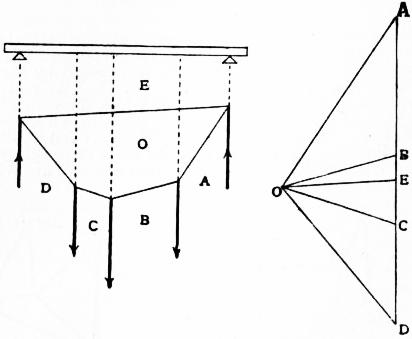 |
| Fig. 30. |
 |
| Fig. 31. |
A graphical method can also be applied to find the moment of a force, or of a system of forces, about any assigned point P. Let F be a force represented by AB in the force-diagram. Draw a parallel through P to meet the sides of the funicular which correspond to OA, OB in the points H, K. If R be the intersection of these sides, the triangles OAB, RHK are similar, and if the perpendiculars OM, RN be drawn we have
HK·OM = AB·RN = F·RN,
which is the moment of F about P. If the given forces are all parallel (say vertical) OM is the same for all, and the moments of the several forces about P are represented on a certain scale by the lengths intercepted by the successive pairs of sides on the vertical through P. Moreover, the moments are compounded by adding (geometrically) the corresponding lengths HK. Hence if a system of vertical forces be in equilibrium, so that the funicular polygon is closed, the length which this polygon intercepts on the vertical through any point P gives the sum of the moments about P of all the forces on one side of this vertical. For instance, in the case of a beam in equilibrium under any given loads and the reactions at the supports, we get a graphical representation of the distribution of bending moment over the beam. The construction in fig. 30 can easily be adjusted so that the closing line shall be horizontal; and the figure then becomes identical with the bending-moment diagram of § 4. If we wish to study the effects of a movable load, or system of loads, in different positions on the beam, it is only necessary to shift the lines of action of the pressures of the supports relatively to the funicular, keeping them at the same, distance apart; the only change is then in the position of the closing line of the funicular. It may be remarked that since this line joins homologous points of two “similar” rows it will envelope a parabola.
The “centre” (§ 4) of a system of parallel forces of given magnitudes, acting at given points, is easily determined graphically. We have only to construct the line of action of the resultant for each of two arbitrary directions of the forces; the intersection of the two lines gives the point required. The construction is neatest if the two arbitrary directions are taken at right angles to one another.
§ 6. Theory of Frames.—A frame is a structure made up of pieces, or members, each of which has two joints connecting it with other members. In a two-dimensional frame, each joint may be conceived as consisting of a small cylindrical pin fitting accurately and smoothly into holes drilled through the members which it connects. This supposition is a somewhat ideal one, and is often only roughly approximated to in practice. We shall suppose, in the first instance, that extraneous forces act on the frame at the joints only, i.e. on the pins.
On this assumption, the reactions on any member at its two joints must be equal and opposite. This combination of equal and opposite forces is called the stress in the member; it may be a tension or a thrust. For diagrammatic purposes each member is sufficiently represented by a straight line terminating at the two joints; these lines will be referred to as the bars of the frame.
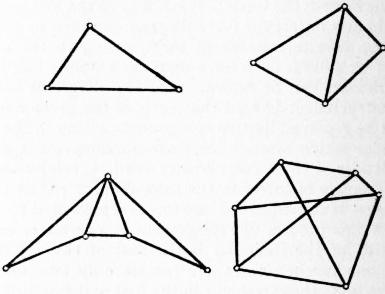 |
| Fig. 32. |
In structural applications a frame must be stiff, or rigid, i.e. it must be incapable of deformation without alteration of length in at least one of its bars. It is said to be just rigid if it ceases to be rigid when any one of its bars is removed. A frame which has more bars than are essential for rigidity may be called over-rigid; such a frame is in general self-stressed, i.e. it is in a state of stress independently of the action of extraneous forces. A plane frame of n joints which is just rigid (as regards deformation in its own plane) has 2n − 3 bars, for if one bar be held fixed the 2(n − 2) co-ordinates of the remaining n − 2 joints must just be determined by the lengths of the remaining bars. The total number of bars is therefore 2(n − 2) + 1. When a plane frame which is just rigid is subject to a given system of equilibrating extraneous forces (in its own plane) acting on the joints, the stresses in the bars are in general uniquely determinate. For the conditions of equilibrium of the forces on each pin furnish 2n equations, viz. two for each point, which are linear in respect of the stresses and the extraneous forces. This system of equations must involve the three conditions of equilibrium of the extraneous forces which are already identically satisfied, by hypothesis; there remain therefore 2n − 3 independent relations to determine the 2n − 3 unknown stresses. A frame of n joints and 2n − 3 bars may of course fail to be rigid owing to some parts being over-stiff whilst others are deformable; in such a case it will be found that the statical equations, apart from the three identical relations imposed by the equilibrium of the extraneous forces, are not all independent but are equivalent to less than 2n − 3 relations. Another exceptional case, known as the critical case, will be noticed later (§ 9).
A plane frame which can be built up from a single bar by successive steps, at each of which a new joint is introduced by two 963 new bars meeting there, is called a simple frame; it is obviously just rigid. The stresses produced by extraneous forces in a simple frame can be found by considering the equilibrium of the various joints in a proper succession; and if the graphical method be employed the various polygons of force can be combined into a single force-diagram. This procedure was introduced by W. J. M. Rankine and J. Clerk Maxwell (1864). It may be noticed that if we take an arbitrary pole in the force-diagram, and draw a corresponding funicular in the skeleton diagram which represents the frame together with the lines of action of the extraneous forces, we obtain two complete reciprocal figures, in Maxwell’s sense. It is accordingly convenient to use Bow’s notation (§ 5), and to distinguish the several compartments of the frame-diagram by letters. See fig. 33, where the successive triangles in the diagram of forces may be constructed in the order XYZ, ZXA, AZB. The class of “simple” frames includes many of the frameworks used in the construction of roofs, lattice girders and suspension bridges; a number of examples will be found in the article Bridges. By examining the senses in which the respective forces act at each joint we can ascertain which members are in tension and which are in thrust; in fig. 33 this is indicated by the directions of the arrowheads.
 |
| Fig. 33. |
 |
| Fig. 34. |
When a frame, though just rigid, is not “simple” in the above sense, the preceding method must be replaced, or supplemented, by one or other of various artifices. In some cases the method of sections is sufficient for the purpose. If an ideal section be drawn across the frame, the extraneous forces on either side must be in equilibrium with the forces in the bars cut across; and if the section can be drawn so as to cut only three bars, the forces in these can be found, since the problem reduces to that of resolving a given force into three components acting in three given lines (§ 4). The “critical case” where the directions of the three bars are concurrent is of course excluded. Another method, always available, will be explained under “Work” (§ 9).
When extraneous forces act on the bars themselves the stress in each bar no longer consists of a simple longitudinal tension or thrust. To find the reactions at the joints we may proceed as follows. Each extraneous force W acting on a bar may be replaced (in an infinite number of ways) by two components P, Q in lines through the centres of the pins at the extremities. In practice the forces W are usually vertical, and the components P, Q are then conveniently taken to be vertical also. We first alter the problem by transferring the forces P, Q to the pins. The stresses in the bars, in the problem as thus modified, may be supposed found by the preceding methods; it remains to infer from the results thus obtained the reactions in the original form of the problem. To find the pressure exerted by a bar AB on the pin A we compound with the force in AB given by the diagram a force equal to P. Conversely, to find the pressure of the pin A on the bar AB we must compound with the force given by the diagram a force equal and opposite to P. This question arises in practice in the theory of “three-jointed” structures; for the purpose in hand such a structure is sufficiently represented by two bars AB, BC. The right-hand figure represents a portion of the force-diagram; in particular ZX> represents the pressure of AB on B in the modified problem where the loads W1 and W2 on the two bars are replaced by loads P1, Q1, and P2, Q2 respectively, acting on the pins. Compounding with this XV>, which represents Q1, we get the actual pressure ZV> exerted by AB on B. The directions and magnitudes of the reactions at A and C are then easily ascertained. On account of its practical importance several other graphical solutions of this problem have been devised.
 |
| Fig. 35. |
§ 7. Three-dimensional Kinematics of a Rigid Body.—The position of a rigid body is determined when we know the positions of three points A, B, C of it which are not collinear, for the position of any other point P is then determined by the three distances PA, PB, PC. The nine co-ordinates (Cartesian or other) of A, B, C are subject to the three relations which express the invariability of the distances BC, CA, AB, and are therefore equivalent to six independent quantities. Hence a rigid body not constrained in any way is said to have six degrees of freedom. Conversely, any six geometrical relations restrict the body in general to one or other of a series of definite positions, none of which can be departed from without violating the conditions in question. For instance, the position of a theodolite is fixed by the fact that its rounded feet rest in contact with six given plane surfaces. Again, a rigid three-dimensional frame can be rigidly fixed relatively to the earth by means of six links.
 | |
| Fig. 36. | Fig. 37. |
The six independent quantities, or “co-ordinates,” which serve to specify the position of a rigid body in space may of course be chosen in an endless variety of ways. We may, for instance, employ the three Cartesian co-ordinates of a particular point O of the body, and three angular co-ordinates which express the orientation of the body with respect to O. Thus in fig. 36, if OA, OB, OC be three mutually perpendicular lines in the solid, we may denote by θ the angle which OC makes with a fixed direction OZ, by ψ the azimuth of the plane ZOC measured from some fixed plane through OZ, and by φ the inclination of the plane COA to the plane ZOC. In fig. 36 these various lines and planes are represented by their intersections with a unit sphere having O as centre. This very useful, although unsymmetrical, system of angular co-ordinates was introduced by L. Euler. It is exemplified in “Cardan’s suspension,” as used in connexion with a compass-bowl or a gyroscope. Thus in the gyroscope the “flywheel” (represented by the globe in fig. 37) can turn about a diameter OC of a ring which is itself free to turn about a diametral axis OX at right angles to the former; this axis is carried by a second ring which is free to turn about a fixed diameter OZ, which is at right angles to OX.
 |
| Fig. 10. |
 |
| Fig. 38. |
 |
| Fig. 39. |
We proceed to sketch the theory of the finite displacements of a rigid body. It was shown by Euler (1776) that any displacement 964 in which one point O of the body is fixed is equivalent to a pure rotation about some axis through O. Imagine two spheres of equal radius with O as their common centre, one fixed in the body and moving with it, the other fixed in space. In any displacement about O as a fixed point, the former sphere slides over the latter, as in a “ball-and-socket” joint. Suppose that as the result of the displacement a point of the moving sphere is brought from A to B, whilst the point which was at B is brought to C (cf. fig. 10). Let J be the pole of the circle ABC (usually a “small circle” of the fixed sphere), and join JA, JB, JC, AB, BC by great-circle arcs. The spherical isosceles triangles AJB, BJC are congruent, and we see that AB can be brought into the position BC by a rotation about the axis OJ through an angle AJB.
It is convenient to distinguish the two senses in which rotation may take place about an axis OA by opposite signs. We shall reckon a rotation as positive when it is related to the direction from O to A as the direction of rotation is related to that of translation in a right-handed screw. Thus a negative rotation about OA may be regarded as a positive rotation about OA′, the prolongation of AO. Now suppose that a body receives first a positive rotation α about OA, and secondly a positive rotation β about OB; and let A, B be the intersections of these axes with a sphere described about O as centre. If we construct the spherical triangles ABC, ABC′ (fig. 38), having in each case the angles at A and B equal to 1⁄2α and 1⁄2β respectively, it is evident that the first rotation will bring a point from C to C′ and that the second will bring it back to C; the result is therefore equivalent to a rotation about OC. We note also that if the given rotations had been effected in the inverse order, the axis of the resultant rotation would have been OC′, so that finite rotations do not obey the “commutative law.” To find the angle of the equivalent rotation, in the actual case, suppose that the second rotation (about OB) brings a point from A to A′. The spherical triangles ABC, A′BC (fig. 39) are “symmetrically equal,” and the angle of the resultant rotation, viz. ACA′, is 2π − 2C. This is equivalent to a negative rotation 2C about OC, whence the theorem that the effect of three successive positive rotations 2A, 2B, 2C about OA, OB, OC, respectively, is to leave the body in its original position, provided the circuit ABC is left-handed as seen from O. This theorem is due to O. Rodrigues (1840). The composition of finite rotations about parallel axes is a particular case of the preceding; the radius of the sphere is now infinite, and the triangles are plane.
In any continuous motion of a solid about a fixed point O, the limiting position of the axis of the rotation by which the body can be brought from any one of its positions to a consecutive one is called the instantaneous axis. This axis traces out a certain cone in the body, and a certain cone in space, and the continuous motion in question may be represented as consisting in a rolling of the former cone on the latter. The proof is similar to that of the corresponding theorem of plane kinematics (§ 3).
It follows from Euler’s theorem that the most general displacement of a rigid body may be effected by a pure translation which brings any one point of it to its final position O, followed by a pure rotation about some axis through O. Those planes in the body which are perpendicular to this axis obviously remain parallel to their original positions. Hence, if σ, σ′ denote the initial and final positions of any figure in one of these planes, the displacement could evidently have been effected by (1) a translation perpendicular to the planes in question, bringing σ into some position σ″ in the plane of σ′, and (2) a rotation about a normal to the planes, bringing σ″ into coincidence with σ (§ 3). In other words, the most general displacement is equivalent to a translation parallel to a certain axis combined with a rotation about that axis; i.e. it may be described as a twist about a certain screw. In particular cases, of course, the translation, or the rotation, may vanish.
The preceding theorem, which is due to Michel Chasles (1830), may be proved in various other interesting ways. Thus if a point of the body be displaced from A to B, whilst the point which was at B is displaced to C, and that which was at C to D, the four points A, B, C, D lie on a helix whose axis is the common perpendicular to the bisectors of the angles ABC, BCD. This is the axis of the required screw; the amount of the translation is measured by the projection of AB or BC or CD on the axis; and the angle of rotation is given by the inclination of the aforesaid bisectors. This construction was given by M. W. Crofton. Again, H. Wiener and W. Burnside have employed the half-turn (i.e. a rotation through two right angles) as the fundamental operation. This has the advantage that it is completely specified by the axis of the rotation, the sense being immaterial. Successive half-turns about parallel axes a, b are equivalent to a translation measured by double the distance between these axes in the direction from a to b. Successive half-turns about intersecting axes a, b are equivalent to a rotation about the common perpendicular to a, b at their intersection, of amount equal to twice the acute angle between them, in the direction from a to b. Successive half-turns about two skew axes a, b are equivalent to a twist about a screw whose axis is the common perpendicular to a, b, the translation being double the shortest distance, and the angle of rotation being twice the acute angle between a, b, in the direction from a to b. It is easily shown that any displacement whatever is equivalent to two half-turns and therefore to a screw.
 |
| Fig. 16. |
In mechanics we are specially concerned with the theory of infinitesimal displacements. This is included in the preceding, but it is simpler in that the various operations are commutative. An infinitely small rotation about any axis is conveniently represented geometrically by a length AB measures along the axis and proportional to the angle of rotation, with the convention that the direction from A to B shall be related to the rotation as is the direction of translation to that of rotation in a right-handed screw. The consequent displacement of any point P will then be at right angles to the plane PAB, its amount will be represented by double the area of the triangle PAB, and its sense will depend on the cyclical order of the letters P, A, B. If AB, AC represent infinitesimal rotations about intersecting axes, the consequent displacement of any point O in the plane BAC will be at right angles to this plane, and will be represented by twice the sum of the areas OAB, OAC, taken with proper signs. It follows by analogy with the theory of moments (§ 4) that the resultant rotation will be represented by AD, the vector-sum of AB, AC (see fig. 16). It is easily inferred as a limiting case, or proved directly, that two infinitesimal rotations α, β about parallel axes are equivalent to a rotation α + β about a parallel axis in the same plane with the two former, and dividing a common perpendicular AB in a point C so that AC/CB = β/α. If the rotations are equal and opposite, so that α + β = 0, the point C is at infinity, and the effect is a translation perpendicular to the plane of the two given axes, of amount α·AB. It thus appears that an infinitesimal rotation is of the nature of a “localized vector,” and is subject in all respects to the same mathematical laws as a force, conceived as acting on a rigid body. Moreover, that an infinitesimal translation is analogous to a couple and follows the same laws. These results are due to Poinsot.
The analytical treatment of small displacements is as follows. We first suppose that one point O of the body is fixed, and take this as the origin of a “right-handed” system of rectangular 965 co-ordinates; i.e. the positive directions of the axes are assumed to be so arranged that a positive rotation of 90° about Ox would bring Oy into the position of Oz, and so on. The displacement will consist of an infinitesimal rotation ε about some axis through O, whose direction-cosines are, say, l, m, n. From the equivalence of a small rotation to a localized vector it follows that the rotation ε will be equivalent to rotations ξ, η, ζ about Ox, Oy, Oz, respectively, provided
ξ = lε, η = mε, ζ = nε,
and we note that
ξ2 + η2 + ζ2 = ε2.
Thus in the case of fig. 36 it may be required to connect the infinitesimal rotations ξ, η, ζ about OA, OB, OC with the variations of the angular co-ordinates θ, ψ, φ. The displacement of the point C of the body is made up of δθ tangential to the meridian ZC and sin θ δψ perpendicular to the plane of this meridian. Hence, resolving along the tangents to the arcs BC, CA, respectively, we have
ξ = δθ sin φ − sin θ δψ cos φ, η = δθ cos φ + sin θ δψ sin φ.
 |
| Fig. 40. |
Again, consider the point of the solid which was initially at A′ in the figure. This is displaced relatively to A′ through a space δψ perpendicular to the plane of the meridian, whilst A′ itself is displaced through a space cos θ δψ in the same direction. Hence
ζ = δφ + cos θ δψ.
To find the component displacements of a point P of the body, whose co-ordinates are x, y, z, we draw PL normal to the plane yOz, and LH, LK perpendicular to Oy, Oz, respectively. The displacement of P parallel to Ox is the same as that of L, which is made up of ηz and −ζy. In this way we obtain the formulae
δx = ηz − ζy, δy = ζx − ξz, δz = ξy − ηx.
The most general case is derived from this by adding the component displacements λ, μ, ν (say) of the point which was at O; thus
| δx = λ + ηz − ζy, δy = μ + ζx − ξz, δz = ν + ξy − ηx. |
The displacement is thus expressed in terms of the six independent quantities ξ, η, ζ, λ, μ, ν. The points whose displacements are in the direction of the resultant axis of rotation are determined by δx : δy : δz = ξ : η : ζ, or
(λ + ηz − ζy)/ξ = (μ + ζx − ξz)/η = (ν + ξy − ηx)/ζ.
These are the equations of a straight line, and the displacement is in fact equivalent to a twist about a screw having this line as axis. The translation parallel to this axis is
lδx + mδy + nδz = (λξ + μη + νζ)/ε.
The linear magnitude which measures the ratio of translation to rotation in a screw is called the pitch. In the present case the pitch is
(λξ + μη + νζ) / (ξ2 + η2 + ζ2).
Since ξ2 + η2 + ζ2, or ε2, is necessarily an absolute invariant for all transformations of the (rectangular) co-ordinate axes, we infer that λξ + μη + νζ is also an absolute invariant. When the latter invariant, but not the former, vanishes, the displacement is equivalent to a pure rotation.
If the small displacements of a rigid body be subject to one constraint, e.g. if a point of the body be restricted to lie on a given surface, the mathematical expression of this fact leads to a homogeneous linear equation between the infinitesimals ξ, η, ζ, λ, μ, ν, say
Aξ + Bη + Cζ + Fλ + Gμ + Hν = 0.
The quantities ξ, η, ζ, λ, μ, ν are no longer independent, and the body has now only five degrees of freedom. Every additional constraint introduces an additional equation of the type (10) and reduces the number of degrees of freedom by one. In Sir R. S. Ball’s Theory of Screws an analysis is made of the possible displacements of a body which has respectively two, three, four, five degrees of freedom. We will briefly notice the case of two degrees, which involves an interesting generalization of the method (already explained) of compounding rotations about intersecting axes. We assume that the body receives arbitrary twists about two given screws, and it is required to determine the character of the resultant displacement. We examine first the case where the axes of the two screws are at right angles and intersect. We take these as axes of x and y; then if ξ, η be the component rotations about them, we have
λ = hξ, μ = kη, ν = 0,
where h, k, are the pitches of the two given screws. The equations (7) of the axis of the resultant screw then reduce to
x/ξ = y/η, z(ξ2 + η2) = (k − h) ξη.
Hence, whatever the ratio ξ : η, the axis of the resultant screw lies on the conoidal surface
z (x2 + y2) = cxy,
where c = 1⁄2(k − h). The co-ordinates of any point on (13) may be written
x = r cos θ, y = r sin θ, z = c sin 2θ;
hence if we imagine a curve of sines to be traced on a circular cylinder so that the circumference just includes two complete undulations, a straight line cutting the axis of the cylinder at right angles and meeting this curve will generate the surface. This is called a cylindroid. Again, the pitch of the resultant screw is
p = (λξ + μη) / (ξ2 + η2) = h cos2 θ + k sin2 θ.
 |
| From Sir Robert S. Ball’s Theory of Screws. |
| Fig. 41. |
The distribution of pitch among the various screws has therefore a simple relation to the pitch-conic
hx2 + ky2 = const;
viz. the pitch of any screw varies inversely as the square of that diameter of the conic which is parallel to its axis. It is to be noticed that the parameter c of the cylindroid is unaltered if the two pitches h, k be increased by equal amounts; the only change is that all the pitches are increased by the same amount. It remains to show that a system of screws of the above type can be constructed so as to contain any two given screws whatever. In the first place, a cylindroid can be constructed so as to have its axis coincident with the common perpendicular to the axes of the two given screws and to satisfy three other conditions, for the position of the centre, the parameter, and the orientation about the axis are still at our disposal. Hence we can adjust these so that the surface shall contain the axes of the two given screws as generators, and that the difference of the corresponding pitches shall have the proper value. It follows that when a body has two degrees of freedom it can twist about any one of a singly infinite system of screws whose axes lie on a certain cylindroid. In particular cases the cylindroid may degenerate into a plane, the pitches being then all equal.
§ 8. Three-dimensional Statics.—A system of parallel forces can be combined two and two until they are replaced by a single resultant equal to their sum, acting in a certain line. As special cases, the system may reduce to a couple, or it may be in equilibrium.
In general, however, a three-dimensional system of forces cannot be replaced by a single resultant force. But it may be reduced to simpler elements in a variety of ways. For example, it may be reduced to two forces in perpendicular skew lines. For consider any plane, and let each force, at its intersection with the plane, be resolved into two components, one (P) normal to the plane, the other (Q) in the plane. The assemblage of parallel forces P can be replaced in general by a single force, and the coplanar system of forces Q by another single force.
If the plane in question be chosen perpendicular to the direction of the vector-sum of the given forces, the vector-sum of the components Q is zero, and these components are therefore equivalent to a couple (§ 4). Hence any three-dimensional system can be reduced to a single force R acting in a certain line, together with a couple G in a plane perpendicular to the line. This theorem was first given by L. Poinsot, and the line of action of R was called by him the central axis of the system. The combination of a force and a couple in a perpendicular plane is termed by Sir R. S. Ball a wrench. Its type, as distinguished from its absolute magnitude, may be specified by a screw whose axis is the line of action of R, and whose pitch is the ratio G/R.
 |
| Fig. 42. |
The case of two forces may be specially noticed. Let AB be the shortest distance between the lines of action, and let AA′, BB′ (fig. 42) represent the forces. Let α, β be the angles which AA′, BB′ make with the direction of the vector-sum, on opposite sides. Divide AB in O, so that
AA′ · cos α · AO = BB′ · cos β · OB,
and draw OC parallel to the vector-sum. Resolving AA′, BB′ each into two components parallel and perpendicular to OC, we see that the former components have a single resultant in OC, of amount
R = AA′ cos α + BB′ cos β,
whilst the latter components form a couple of moment
G = AA′ · AB · sin α = BB′ · AB · sin β.
Conversely it is seen that any wrench can be replaced in an infinite number of ways by two forces, and that the line of action of one of these may be chosen quite arbitrarily. Also, we find from (2) and (3) that
G · R = AA′ · BB′ · AB · sin (α + β).
The right-hand expression is six times the volume of the tetrahedron of which the lines AA′, BB′ representing the forces are opposite edges; and we infer that, in whatever way the wrench be resolved into two forces, the volume of this tetrahedron is invariable.
To define the moment of a force about an axis HK, we project the force orthogonally on a plane perpendicular to HK and take the moment of the projection about the intersection of HK with the plane (see § 4). Some convention as to sign is necessary; we shall reckon the moment to be positive when the tendency of the force is right-handed as regards the direction from H to K. Since two concurrent forces and their resultant obviously project into two concurrent forces and their resultant, we see that the sum of the moments of two concurrent forces about any axis HK is equal to the moment of their resultant. Parallel forces may be included in this statement as a limiting case. Hence, in whatever way one system of forces is by successive steps replaced by another, no change is made in the sum of the moments about any assigned axis. By means of this theorem we can show that the previous reduction of any system to a wrench is unique.
From the analogy of couples to translations which was pointed out in § 7, we may infer that a couple is sufficiently represented by a “free” (or non-localized) vector perpendicular to its plane. The length of the vector must be proportional to the moment of the couple, and its sense must be such that the sum of the moments of the two forces of the couple about it is positive. In particular, we infer that couples of the same moment in parallel planes are equivalent; and that couples in any two planes may be compounded by geometrical addition of the corresponding vectors. Independent statical proofs are of course easily given. Thus, let the plane of the paper be perpendicular to the planes of two couples, and therefore perpendicular to the line of intersection of these planes. By § 4, each couple can be replaced by two forces ±P (fig. 43) perpendicular to the plane of the paper, and so that one force of each couple is in the line of intersection (B); the arms (AB, BC) will then be proportional to the respective moments. The two forces at B will cancel, and we are left with a couple of moment P·AC in the plane AC. If we draw three vectors to represent these three couples, they will be perpendicular and proportional to the respective sides of the triangle ABC; hence the third vector is the geometric sum of the other two. Since, in this proof the magnitude of P is arbitrary, It follows incidentally that couples of the same moment in parallel planes, e.g. planes parallel to AC, are equivalent.
 |
| Fig. 43. |
 |
| Fig. 44. |
Hence a couple of moment G, whose axis has the direction (l, m, n) relative to a right-handed system of rectangular axes, is equivalent to three couples lG, mG, nG in the co-ordinate planes. The analytical reduction of a three-dimensional system can now be conducted as follows. Let (x1, y1, z1) be the co-ordinates of a point P1 on the line of action of one of the forces, whose components are (say) X1, Y1, Z1. Draw P1H normal to the plane zOx, and HK perpendicular to Oz. In KH introduce two equal and opposite forces ±X1. The force X1 at P1 with −X1 in KH forms a couple about Oz, of moment −y1X1. Next, introduce along Ox two equal and opposite forces ±X1. The force X1 in KH with −X1 in Ox forms a couple about Oy, of moment z1X1. Hence the force X1 can be transferred from P1 to O, provided we introduce couples of moments z1X1 about Oy and −y1X1, about Oz. Dealing in the same way with the forces Y1, Z1 at P1, we find that all three components of the force at P1 can be transferred to O, provided we introduce three couples L1, M1, N1 about Ox, Oy, Oz respectively, viz.
L1 = y1Z1 − z1Y1, M1 = z1X1 − x1Z1, N1 = x1Y1 − y1X1.
It is seen that L1, M1, N1 are the moments of the original force at P1 about the co-ordinate axes. Summing up for all the forces of the given system, we obtain a force R at O, whose components are
X = Σ(Xr), Y = Σ(Yr), Z = Σ(Zr),
and a couple G whose components are
L = Σ(Lr), M = Σ(Mr), N = Σ(Nr),
where r = 1, 2, 3 ... Since R2 = X2 + Y2 + Z2, G2 = L2 + M2 + N2, it is necessary and sufficient for equilibrium that the six quantities X, Y, Z, L, M, N, should all vanish. In words: the sum of the projections of the forces on each of the co-ordinate axes must vanish; and, the sum of the moments of the forces about each of these axes must vanish.
If any other point O′, whose co-ordinates are x, y, z, be chosen in place of O, as the point to which the forces are transferred, we have to write x1 − x, y1 − y, z1 − z for x1, y1, z1, and so on, in the preceding process. The components of the resultant force R are unaltered, but the new components of couple are found to be
| L′ = L − yZ + zY, M′ = M − zX + xZ, N′ = N − xY + yX. |
By properly choosing O′ we can make the plane of the couple perpendicular to the resultant force. The conditions for this are L′ : M′ : N′ = X : Y : Z, or
| L − yZ + zY | = | M − zX + xZ | = | N − xY + yX |
| X | Y | Z |
These are the equations of the central axis. Since the moment of the resultant couple is now
| G′ = | X | L′ + | Y | M′ + | Z | N′ = | LX + MY + NZ | , |
| R | R | R | R |
the pitch of the equivalent wrench is
(LX + MY + NZ) / (X2 + Y2 + Z2).
It appears that X2 + Y2 + Z2 and LX + MY + NZ are absolute invariants (cf. § 7). When the latter invariant, but not the former, vanishes, the system reduces to a single force.
The analogy between the mathematical relations of infinitely small displacements on the one hand and those of force-systems on the other enables us immediately to convert any theorem in the one subject into a theorem in the other. For example, we can assert without further proof that any infinitely small displacement may be resolved into two rotations, and that the axis of one of these can be chosen arbitrarily. Again, that wrenches of arbitrary amounts about two given screws compound into a wrench the locus of whose axis is a cylindroid.
The mathematical properties of a twist or of a wrench have been the subject of many remarkable investigations, which are, however, of secondary importance from a physical point of view. In the “Null-System” of A. F. Möbius (1790-1868), a line such that the moment of a given wrench about it is zero is called a null-line. The triply infinite system of null-lines form what is called in line-geometry a “complex.” As regards the configuration of this complex, consider a line whose shortest distance from the central axis is r, and whose inclination to the central axis is θ. The moment of the resultant force R of the wrench about this line is − Rr sin θ, and that of the couple G is G cos θ. Hence the line will be a null-line provided
tan θ = k/r,
where k is the pitch of the wrench. The null-lines which are at a given distance r from a point O of the central axis will therefore form one system of generators of a hyperboloid of revolution; and by varying r we get a series of such hyperboloids with a common centre and axis. By moving O along the central axis we obtain the whole complex of null-lines. It appears also from (11) that the null-lines whose distance from the central axis is r are tangent lines to a system of helices of slope tan−1 (r/k); and it is to be noticed that these helices are left-handed if the given wrench is right-handed, and vice versa.
Since the given wrench can be replaced by a force acting through any assigned point P, and a couple, the locus of the null-lines through P is a plane, viz. a plane perpendicular to the vector which represents the couple. The complex is therefore of the type called “linear” (in relation to the degree of this locus). The plane in question is called the null-plane of P. If the null-plane of P pass through Q, the null-plane of Q will pass through P, since PQ is a null-line. Again, any plane ω is the locus of a system of null-lines meeting in a point, called the null-point of ω. If a plane revolve about a fixed straight line p in it, its null-point describes another straight line p′, which is called the conjugate line of p. We have seen that the wrench may be replaced by two forces, one of which may act in any arbitrary line p. It is now evident that the second force must act in the conjugate line p′, since every line meeting p, p′ is a null-line. Again, since the shortest distance between any two conjugate lines cuts the central axis at right angles, the orthogonal projections of two conjugate lines on a plane perpendicular to the central axis will be parallel (fig. 42). This property was employed by L. Cremona to prove the existence under certain conditions of “reciprocal figures” in a plane (§ 5). If we take any polyhedron with plane faces, the null-planes of its vertices with respect to a given wrench will form another polyhedron, and the edges of the latter will be conjugate (in the above sense) to those of the former. Projecting orthogonally on a plane perpendicular to the central axis we obtain two reciprocal figures.
In the analogous theory of infinitely small displacements of a solid, a “null-line” is a line such that the lengthwise displacement of any point on it is zero.
Since a wrench is defined by six independent quantities, it can in general be replaced by any system of forces which involves six adjustable elements. For instance, it can in general be replaced by six forces acting in six given lines, e.g. in the six edges of a given tetrahedron. An exception to the general statement occurs when the six lines are such that they are possible lines of action of a system of six forces in equilibrium; they are then said to be in involution. The theory of forces in involution has been studied by A. Cayley, J. J. Sylvester and others. We have seen that a rigid structure may in general be rigidly connected with the earth by six links, and it now appears that any system of forces acting on the structure can in general be balanced by six determinate forces exerted by the links. If, however, the links are in involution, these forces become infinite or indeterminate. There is a corresponding kinematic peculiarity, in that the connexion is now not strictly rigid, an infinitely small relative displacement being possible. See § 9.
When parallel forces of given magnitudes act at given points, the resultant acts through a definite point, or centre of parallel forces, which is independent of the special direction of the forces. If Pr be the force at (xr, yr, zr), acting in the direction (l, m, n), the formulae (6) and (7) reduce to
X = Σ(P)·l, Y = Σ(P)·m, Z = Σ(P)·n,
and
L = Σ(P)·(ny − mz), M = Σ(P)·(lz − nx), N = Σ(P)·(mx − ly),
provided
| x = | Σ(Px) | , y = | Σ(Py) | , z = | Σ(Pz) | . |
| Σ(P) | Σ(P) | Σ(P) |
These are the same as if we had a single force Σ(P) acting at the point (x, y, z), which is the same for all directions (l, m, n). We can hence derive the theory of the centre of gravity, as in § 4. An exceptional case occurs when Σ(P) = 0.
If we imagine a rigid body to be acted on at given points by forces of given magnitudes in directions (not all parallel) which are fixed in space, then as the body is turned about the resultant wrench will assume different configurations in the body, and will in certain positions reduce to a single force. The investigation of such questions forms the subject of “Astatics,” which has been cultivated by Möbius, Minding, G. Darboux and others. As it has no physical bearing it is passed over here.
 |
| Fig. 45. |
§ 9. Work.—The work done by a force acting on a particle, in any infinitely small displacement, is defined as the product of the force into the orthogonal projection of the displacement on the direction of the force; i.e. it is equal to F·δs cos θ, where F is the force, δs the displacement, and θ is the angle between the directions of F and δs. In the language of vector analysis (q.v.) it is the “scalar product” of the vector representing the force and the displacement. In the same way, the work done by a force acting on a rigid body in any infinitely small displacement of the body is the scalar product of the force into the displacement of any point on the line of action. This product is the same whatever point on the line of action be taken, since the lengthwise components of the displacements of any two points A, B on a line AB are equal, to the first order of small quantities. To see this, let A′, B′ be the displaced positions of A, B, and let φ be the infinitely small angle between AB and A′B′. Then if α, β be the orthogonal projections of A′, B′ on AB, we have
Aα − Bβ = AB − αβ = AB (1 − cos φ) = 1⁄2AB·φ2,
ultimately. Since this is of the second order, the products F·Aα and F·Bβ are ultimately equal.
 |
 |
| Fig. 46. | Fig. 47. |
The total work done by two concurrent forces acting on a particle, or on a rigid body, in any infinitely small displacement, is equal to the work of their resultant. Let AB, AC (fig. 46) represent the forces, AD their resultant, and let AH be the direction of the displacement δs of the point A. The proposition follows at once from the fact that the sum of orthogonal projections of AB>, AC> on AH is equal to the projection of AD>. It is to be noticed that AH need not be in the same plane with AB, AC.
It follows from the preceding statements that any two systems 968 of forces which are statically equivalent, according to the principles of §§ 4, 8, will (to the first order of small quantities) do the same amount of work in any infinitely small displacement of a rigid body to which they may be applied. It is also evident that the total work done in two or more successive infinitely small displacements is equal to the work done in the resultant displacement.
The work of a couple in any infinitely small rotation of a rigid body about an axis perpendicular to the plane of the couple is equal to the product of the moment of the couple into the angle of rotation, proper conventions as to sign being observed. Let the couple consist of two forces P, P (fig. 47) in the plane of the paper, and let J be the point where this plane is met by the axis of rotation. Draw JBA perpendicular to the lines of action, and let ε be the angle of rotation. The work of the couple is
P·JA·ε − P·JB·ε = P·AB·ε = Gε,
if G be the moment of the couple.
The analytical calculation of the work done by a system of forces in any infinitesimal displacement is as follows. For a two-dimensional system we have, in the notation of §§ 3, 4,
| Σ(Xδx + Yδy) | = Σ{X(λ − yε) + Y(μ + xε)} |
| = Σ(X)·λ + Σ(Y)·μ + Σ(xY − yX) ε | |
| = Xλ + Yμ + Nε. |
Again, for a three-dimensional system, in the notation of §§ 7, 8,
| Σ(Xδx + Yδy + Zδz) |
| = Σ{(X(λ + ηz − ζy) + Y(μ + ζx − ξx) + Z(ν + ξy − ηx)} |
| = Σ(X)·λ + Σ(Y)·μ + Σ(Z)·ν + Σ(yZ − zY)·ξ + Σ(zX − xZ)·η + Σ(xY − yX)·ζ |
| = Xλ + Yμ + Zν + Lξ + Mη + Nζ. |
This expression gives the work done by a given wrench when the body receives a given infinitely small twist; it must of course be an absolute invariant for all transformations of rectangular axes. The first three terms express the work done by the components of a force (X, Y, Z) acting at O, and the remaining three terms express the work of a couple (L, M, N).
 |
| Fig. 48. |
The work done by a wrench about a given screw, when the body twists about a second given screw, may be calculated directly as follows. In fig. 48 let R, G be the force and couple of the wrench, ε,τ the rotation and translation in the twist. Let the axes of the wrench and the twist be inclined at an angle θ, and let h be the shortest distance between them. The displacement of the point H in the figure, resolved in the direction of R, is τ cos θ − εh sin θ. The work is therefore
R (τ cos θ − εh sin θ) + G cos θ
= Rε {(p + p′) cos θ − h sin θ},
if G = pR, τ = p′ε, i.e. p, p′ are the pitches of the two screws. The factor (p + p′) cos θ − h sin θ is called the virtual coefficient of the two screws which define the types of the wrench and twist, respectively.
A screw is determined by its axis and its pitch, and therefore involves five Independent elements. These may be, for instance, the five ratios ξ : η : ζ : λ : μ : ν of the six quantities which specify an infinitesimal twist about the screw. If the twist is a pure rotation, these quantities are subject to the relation
λξ + μη + νζ = 0.
In the analytical investigations of line geometry, these six quantities, supposed subject to the relation (4), are used to specify a line, and are called the six “co-ordinates” of the line; they are of course equivalent to only four independent quantities. If a line is a null-line with respect to the wrench (X, Y, Z, L, M, N), the work done in an infinitely small rotation about it is zero, and its co-ordinates are accordingly subject to the further relation
Lξ + Mη + Nζ + Xλ + Yμ + Zν = 0,
where the coefficients are constant. This is the equation of a “linear complex” (cf. § 8).
Two screws are reciprocal when a wrench about one does no work on a body which twists about the other. The condition for this is
λξ′ + μη′ + νζ′ + λ′ξ + μ′η + ν′ζ = 0,
if the screws be defined by the ratios ξ : η : ζ : λ : μ : ν and ξ′ : η′ : ζ′ : λ′ : μ′ : ν′, respectively. The theory of the screw-systems which are reciprocal to one, two, three, four given screws respectively has been investigated by Sir R. S. Ball.
Considering a rigid body in any given position, we may contemplate the whole group of infinitesimal displacements which might be given to it. If the extraneous forces are in equilibrium the total work which they would perform in any such displacement would be zero, since they reduce to a zero force and a zero couple. This is (in part) the celebrated principle of virtual velocities, now often described as the principle of virtual work, enunciated by John Bernoulli (1667-1748). The word “virtual” is used because the displacements in question are not regarded as actually taking place, the body being in fact at rest. The “velocities” referred to are the velocities of the various points of the body in any imagined motion of the body through the position in question; they obviously bear to one another the same ratios as the corresponding infinitesimal displacements. Conversely, we can show that if the virtual work of the extraneous forces be zero for every infinitesimal displacement of the body as rigid, these forces must be in equilibrium. For by giving the body (in imagination) a displacement of translation we learn that the sum of the resolved parts of the forces in any assigned direction is zero, and by giving it a displacement of pure rotation we learn that the sum of the moments about any assigned axis is zero. The same thing follows of course from the analytical expression (2) for the virtual work. If this vanishes for all values of λ, μ, ν, ξ, η, ζ we must have X, Y, Z, L, M, N = 0, which are the conditions of equilibrium.
The principle can of course be extended to any system of particles or rigid bodies, connected together in any way, provided we take into account the internal stresses, or reactions, between the various parts. Each such reaction consists of two equal and opposite forces, both of which may contribute to the equation of virtual work.
The proper significance of the principle of virtual work, and of its converse, will appear more clearly when we come to kinetics (§ 16); for the present it may be regarded merely as a compact and (for many purposes) highly convenient summary of the laws of equilibrium. Its special value lies in this, that by a suitable adjustment of the hypothetical displacements we are often enabled to eliminate unknown reactions. For example, in the case of a particle lying on a smooth curve, or on a smooth surface, if it be displaced along the curve, or on the surface, the virtual work of the normal component of the pressure may be ignored, since it is of the second order. Again, if two bodies are connected by a string or rod, and if the hypothetical displacements be adjusted so that the distance between the points of attachment is unaltered, the corresponding stress may be ignored. This is evident from fig. 45; if AB, A′B′ represent the two positions of a string, and T be the tension, the virtual work of the two forces ±T at A, B is T(Aα − Bβ), which was shown to be of the second order. Again, the normal pressure between two surfaces disappears from the equation, provided the displacements be such that one of these surfaces merely slides relatively to the other. It is evident, in the first place, that in any displacement common to the two surfaces, the work of the two equal and opposite normal pressures will cancel; moreover if, one of the surfaces being fixed, an infinitely small displacement shifts the point of contact from A to B, and if A′ be the new position of that point of the sliding body which was at A, the projection of AA′ on the normal at A is of the second order. It is to be noticed, in this case, that the tangential reaction (if any) between the two surfaces is not eliminated. Again, if the displacements be such that one curved surface rolls without sliding on another, the reaction, whether normal or tangential, at the point of contact may be ignored. For the virtual work of two equal and opposite forces will cancel in any displacement which is common to the two surfaces; whilst, if one surface be fixed, the displacement of that point of the rolling surface which was in contact with the other is of the second order. We are thus able to imagine a great variety of mechanical systems to which the principle of virtual work can be applied without any regard to 969 the internal stresses, provided the hypothetical displacements be such that none of the connexions of the system are violated.
If the system be subject to gravity, the corresponding part of the virtual work can be calculated from the displacement of the centre of gravity. If W1, W2, ... be the weights of a system of particles, whose depths below a fixed horizontal plane of reference are z1, z2, ..., respectively, the virtual work of gravity is
W1δ·z1 + W2δz2 + ... = δ(W1z1 + W2z2 + ...) = (W1 + W2 + ...) δz,
where z is the depth of the centre of gravity (see § 8 (14) and § 11 (6)). This expression is the same as if the whole mass were concentrated at the centre of gravity, and displaced with this point. An important conclusion is that in any displacement of a system of bodies in equilibrium, such that the virtual work of all forces except gravity may be ignored, the depth of the centre of gravity is “stationary.”
The question as to stability of equilibrium belongs essentially to kinetics; but we may state by anticipation that in cases where gravity is the only force which does work, the equilibrium of a body or system of bodies is stable only if the depth of the centre of gravity be a maximum.
Consider, for instance, the case of a bar resting with its ends on two smooth inclines (fig. 18). If the bar be displaced in a vertical plane so that its ends slide on the two inclines, the instantaneous centre is at the point J. The displacement of G is at right angles to JG; this shows that for equilibrium JG must be vertical. Again, the locus of G is an arc of an ellipse whose centre is in the intersection of the planes; since this arc is convex upwards the equilibrium is unstable. A general criterion for the case of a rigid body movable in two dimensions, with one degree of freedom, can be obtained as follows. We have seen (§ 3) that the sequence of possible positions is obtained if we imagine the “body-centrode” to roll on the “space-centrode.” For equilibrium, the altitude of the centre of gravity G must be stationary; hence G must lie in the same vertical line with the point of contact J of the two curves. Further, it is known from the theory of “roulettes” that the locus of G will be concave or convex upwards according as
| cos φ | = | 1 | + | 1 | , |
| h | ρ | ρ′ |
 |
| Fig. 49. |
where ρ, ρ′ are the radii of curvature of the two curves at J, φ is the inclination of the common tangent at J to the horizontal, and h is the height of G above J. The signs of ρ, ρ′ are to be taken positive when the curvatures are as in the standard case shown in fig. 49. Hence for stability the upper sign must obtain in (8). The same criterion may be arrived at in a more intuitive manner as follows. If the body be supposed to roll (say to the right) until the curves touch at J′, and if JJ′ = δs, the angle through which the upper figure rotates is δs/ρ + δs/ρ′, and the horizontal displacement of G is equal to the product of this expression into h. If this displacement be less than the horizontal projection of JJ′, viz. δs cosφ, the vertical through the new position of G will fall to the left of J′ and gravity will tend to restore the body to its former position. It is here assumed that the remaining forces acting on the body in its displaced position have zero moment about J′; this is evidently the case, for instance, in the problem of “rocking stones.”
The principle of virtual work is specially convenient in the theory of frames (§ 6), since the reactions at smooth joints and the stresses in inextensible bars may be left out of account. In particular, in the case of a frame which is just rigid, the principle enables us to find the stress in any one bar independently of the rest. If we imagine the bar in question to be removed, equilibrium will still persist if we introduce two equal and opposite forces S, of suitable magnitude, at the joints which it connected. In any infinitely small deformation of the frame as thus modified, the virtual work of the forces S, together with that of the original extraneous forces, must vanish; this determines S.
As a simple example, take the case of a light frame, whose bars form the slides of a rhombus ABCD with the diagonal BD, suspended from A and carrying a weight W at C; and let it be required to find the stress in BD. If we remove the bar BD, and apply two equal and opposite forces S at B and D, the equation is
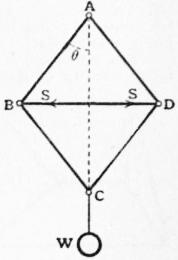 |
| Fig. 50. |
W·δ(2l cosθ) + 2S·δ (l sin θ) = 0,
where l is the length of a side of the rhombus, and θ its inclination to the vertical. Hence
S = W tan θ = W · BD/AC.
The method is specially appropriate when the frame, although just rigid, is not “simple” in the sense of § 6, and when accordingly the method of reciprocal figures is not immediately available. To avoid the intricate trigonometrical calculations which would often be necessary, graphical devices have been introduced by H. Müller-Breslau and others. For this purpose the infinitesimal displacements of the various joints are replaced by finite lengths proportional to them, and therefore proportional to the velocities of the joints in some imagined motion of the deformable frame through its actual configuration; this is really (it may be remarked) a reversion to the original notion of “virtual velocities.” Let J be the instantaneous centre for any bar CD (fig. 12), and let s1, s2 represent the virtual velocities of C, D. If these lines be turned through a right angle in the same sense, they take up positions such as CC′, DD′, where C′, D′ are on JC, JD, respectively, and C′D′ is parallel to CD. Further, if F1 (fig. 51) be any force acting on the joint C, its virtual work will be equal to the moment of F1 about C′; the equation of virtual work is thus transformed into an equation of moments.
 | |
| Fig. 12. | Fig. 51. |
 |
| Fig. 52. |
Consider, for example, a frame whose sides form the six sides of a hexagon ABCDEF and the three diagonals AD, BE, CF; and suppose that it is required to find the stress in CF due to a given system of extraneous forces in equilibrium, acting on the joints. Imagine the bar CF to be removed, and consider a deformation in which AB is fixed. The instantaneous centre of CD will be at the intersection of AD, BC, and if C′D′ be drawn parallel to CD, the lines CC′, DD′ may be taken to represent the virtual velocities of C, D turned each through a right angle. Moreover, if we draw D′E′ parallel to DE, and E′F′ parallel to EF, the lines CC′, DD′, EE′, FF′ will represent on the same scale the virtual velocities of the points C, D, E, F, respectively, turned each through a right angle. The equation of virtual work is then formed by taking moments about C′, D′, E′, F′ of the extraneous forces which act at C, D, E, F, respectively. Amongst these forces we must include the two equal and opposite forces S which take the place of the stress in the removed bar FC.
The above method lends itself naturally to the investigation of the critical forms of a frame whose general structure is given. We have seen that the stresses produced by an equilibrating system of extraneous forces in a frame which is just rigid, according to the criterion of § 6, are in general uniquely determinate; in particular, when there are no extraneous forces the bars are in general free from stress. It may however happen that owing to some special relation between the lengths of the bars the frame admits of an infinitesimal deformation. The simplest case is that of a frame of three bars, when the three joints A, B, C fall into a straight line; a small displacement of the joint B at right angles to AC would involve changes in the lengths of AB, BC which are only of the second order of small quantities. Another example is shown in fig. 53. The graphical method leads at once to the detection of such cases. Thus in the hexagonal frame of fig. 52, if an infinitesimal deformation is possible without removing the bar CF, the instantaneous centre of CF (when AB is fixed) will be at the intersection of AF and BC, and since CC′, FF′ represent the virtual velocities of the points C, F, turned each through a right angle, C′F′ must be parallel to CF. Conversely, if this condition be satisfied, an infinitesimal deformation is possible. The result may be generalized into the statement that a frame has a critical form whenever a frame of the same structure can be designed 970 with corresponding bars parallel, but without complete geometric similarity. In the case of fig. 52 it may be shown that an equivalent condition is that the six points A, B, C, D, E, F should lie on a conic (M. W. Crofton). This is fulfilled when the opposite sides of the hexagon are parallel, and (as a still more special case) when the hexagon is regular.
 |
| Fig. 53. |
When a frame has a critical form it may be in a state of stress independently of the action of extraneous forces; moreover, the stresses due to extraneous forces are indeterminate, and may be infinite. For suppose as before that one of the bars is removed. If there are no extraneous forces the equation of virtual work reduces to S·δs = 0, where S is the stress in the removed bar, and δs is the change in the distance between the joints which it connected. In a critical form we have δs = 0, and the equation is satisfied by an arbitrary value of S; a consistent system of stresses in the remaining bars can then be found by preceding rules. Again, when extraneous forces P act on the joints, the equation is
Σ(P·δp) + S·δs = 0,
where δp is the displacement of any joint in the direction of the corresponding force P. If Σ(P·δp) = 0, the stresses are merely indeterminate as before; but if Σ (P·δp) does not vanish, the equation cannot be satisfied by any finite value of S, since δs = 0. This means that, if the material of the frame were absolutely unyielding, no finite stresses in the bars would enable it to withstand the extraneous forces. With actual materials, the frame would yield elastically, until its configuration is no longer “critical.” The stresses in the bars would then be comparatively very great, although finite. The use of frames which approximate to a critical form is of course to be avoided in practice.
A brief reference must suffice to the theory of three dimensional frames. This is important from a technical point of view, since all structures are practically three-dimensional. We may note that a frame of n joints which is just rigid must have 3n − 6 bars; and that the stresses produced in such a frame by a given system of extraneous forces in equilibrium are statically determinate, subject to the exception of “critical forms.”
§ 10. Statics of Inextensible Chains.—The theory of bodies or structures which are deformable in their smallest parts belongs properly to elasticity (q.v.). The case of inextensible strings or chains is, however, so simple that it is generally included in expositions of pure statics.
It is assumed that the form can be sufficiently represented by a plane curve, that the stress (tension) at any point P of the curve, between the two portions which meet there, is in the direction of the tangent at P, and that the forces on any linear element δs must satisfy the conditions of equilibrium laid down in § 1. It follows that the forces on any finite portion will satisfy the conditions of equilibrium which apply to the case of a rigid body (§ 4).
 |
| Fig. 54. |
We will suppose in the first instance that the curve is plane. It is often convenient to resolve the forces on an element PQ (= δs) in the directions of the tangent and normal respectively. If T, T + δT be the tensions at P, Q, and δψ be the angle between the directions of the curve at these points, the components of the tensions along the tangent at P give (T + δT) cos ψ − T, or δT, ultimately; whilst for the component along the normal at P we have (T + δT) sin δψ, or Tδψ, or Tδs/ρ, where ρ is the radius of curvature.
Suppose, for example, that we have a light string stretched over a smooth curve; and let Rδs denote the normal pressure (outwards from the centre of curvature) on δs. The two resolutions give δT = 0, Tδψ = Rδs, or
T = const., R = T/ρ.
The tension is constant, and the pressure per unit length varies as the curvature.
Next suppose that the curve is “rough”; and let Fδs be the tangential force of friction on δs. We have δT ± Fδs = 0, Tδψ = Rδs, where the upper or lower sign is to be taken according to the sense in which F acts. We assume that in limiting equilibrium we have F = μR, everywhere, where μ is the coefficient of friction. If the string be on the point of slipping in the direction in which ψ increases, the lower sign is to be taken; hence δT = Fδs = μTδψ, whence
T = T0 eμψ,
if T0 be the tension corresponding to ψ = 0. This illustrates the resistance to dragging of a rope coiled round a post; e.g. if we put μ = .3, ψ = 2π, we find for the change of tension in one turn T/T0 = 6.5. In two turns this ratio is squared, and so on.
Again, take the case of a string under gravity, in contact with a smooth curve in a vertical plane. Let ψ denote the inclination to the horizontal, and wδs the weight of an element δs. The tangential and normal components of wδs are −s sinψ and −wδs cosψ. Hence
δT = wδs sin ψ, Tδψ = wδs cos ψ + Rδs.
If we take rectangular axes Ox, Oy, of which Oy is drawn vertically upwards, we have δy = sin ψ δs, whence δT = wδy. If the string be uniform, w is constant, and
T = wy + const. = w (y − y0),
say; hence the tension varies as the height above some fixed level (y0). The pressure is then given by the formula
| R = T | dψ | −w cos ψ. |
| ds |
In the case of a chain hanging freely under gravity it is usually convenient to formulate the conditions of equilibrium of a finite portion PQ. The forces on this reduce to three, viz. the weight of PQ and the tensions at P, Q. Hence these three forces will be concurrent, and their ratios will be given by a triangle of forces. In particular, if we consider a length AP beginning at the lowest point A, then resolving horizontally and vertically we have
T cos ψ = T0, T sinψ = W,
where T0 is the tension at A, and W is the weight of PA. The former equation expresses that the horizontal tension is constant.
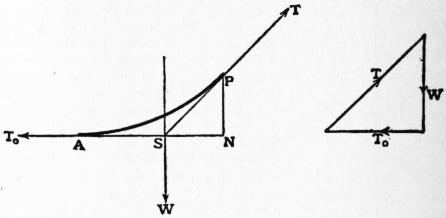 |
| Fig. 55. |
If the chain be uniform we have W = ws, where s is the arc AP: hence ws = T0 tan ψ. If we write T0 = wa, so that a is the length of a portion of the chain whose weight would equal the horizontal tension, this becomes
s = a tan ψ.
This is the “intrinsic” equation of the curve. If the axes of x and y be taken horizontal and vertical (upwards), we derive
x = a log (sec ψ + tan ψ), y = a sec ψ.
Eliminating ψ we obtain the Cartesian equation
| y = a cosh | x |
| a |
of the common catenary, as it is called (fig. 56). The omission of the additive arbitrary constants of integration in (8) is equivalent to a special choice of the origin O of co-ordinates; viz. O is at a distance a vertically below the lowest point (ψ = 0) of the curve. The horizontal line through O is called the directrix. The relations
| s = a sinh | x | , y2 = a2 + s2, T = T0 sec ψ = wy, |
| a |
 |
| Fig. 56. |
which are involved in the preceding formulae are also noteworthy. It is a classical problem in the calculus of variations to deduce the equation (9) from the condition that the depth of the centre of gravity of a chain of given length hanging between fixed points must be stationary (§ 9). The length a is called the parameter of the catenary; it determines the scale of the curve, all catenaries being geometrically similar. If weights be suspended from various points of a hanging chain, the intervening portions will form arcs of equal catenaries, since the horizontal tension (wa) is the same for all. Again, if a chain pass over a perfectly smooth peg, the catenaries in which it hangs on the two sides, though usually of different parameters, will have the same directrix, since by (10) y is the same for both at the peg.
As an example of the use of the formulae we may determine the maximum span for a wire of given material. The condition is that the tension must not exceed the weight of a certain length λ of the wire. At the ends we shall have y = λ, or
| λ = a cosh | x | , |
| a |
and the problem is to make x a maximum for variations of a. Differentiating (11) we find that, if dx/da = 0,
| x | tanh | x | = 1. |
| a | a |
It is easily seen graphically, or from a table of hyperbolic tangents, that the equation u tanh u = 1 has only one positive root (u = 1.200); the span is therefore
2x = 2au = 2λ/sinh u = 1.326 λ,
and the length of wire is
2s = 2λ/u = 1.667 λ.
The tangents at the ends meet on the directrix, and their inclination to the horizontal is 56° 30′.
 |
| Fig. 57. |
The relation between the sag, the tension, and the span of a wire (e.g. a telegraph wire) stretched nearly straight between two points A, B at the same level is determined most simply from first principles. If T be the tension, W the total weight, k the sag in the middle, and ψ the inclination to the horizontal at A or B, we have 2Tψ = W, AB = 2ρψ, approximately, where ρ is the radius of curvature. Since 2kρ = (1⁄2AB)2, ultimately, we have
k = 1⁄8W · AB/T.
The same formula applies if A, B be at different levels, provided k be the sag, measured vertically, half way between A and B.
In relation to the theory of suspension bridges the case where the weight of any portion of the chain varies as its horizontal projection is of interest. The vertical through the centre of gravity of the arc AP (see fig. 55) will then bisect its horizontal projection AN; hence if PS be the tangent at P we shall have AS = SN. This property is characteristic of a parabola whose axis is vertical. If we take A as origin and AN as axis of x, the weight of AP may be denoted by wx, where w is the weight per unit length at A. Since PNS is a triangle of forces for the portion AP of the chain, we have wx/T0 = PN/NS, or
y = w · x2/2T0,
which is the equation of the parabola in question. The result might of course have been inferred from the theory of the parabolic funicular in § 2.
Finally, we may refer to the catenary of uniform strength, where the cross-section of the wire (or cable) is supposed to vary as the tension. Hence w, the weight per foot, varies as T, and we may write T = wλ, where λ is a constant length. Resolving along the normal the forces on an element δs, we find Tδψ = wδs cos ψ, whence
| ρ = | ds | = λ sec ψ. |
| dψ |
From this we derive
| x = λψ, y = λ log sec | x | , |
| λ |
where the directions of x and y are horizontal and vertical, and the origin is taken at the lowest point. The curve (fig. 58) has two vertical asymptotes x = ± 1⁄2πλ; this shows that however the thickness of a cable be adjusted there is a limit πλ to the horizontal span, where λ depends on the tensile strength of the material. For a uniform catenary the limit was found above to be 1.326λ.
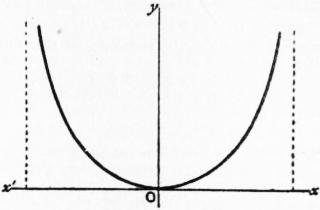 |
| Fig. 58. |
For investigations relating to the equilibrium of a string in three dimensions we must refer to the textbooks. In the case of a string stretched over a smooth surface, but in other respects free from extraneous force, the tensions at the ends of a small element δs must be balanced by the normal reaction of the surface. It follows that the osculating plane of the curve formed by the string must contain the normal to the surface, i.e. the curve must be a “geodesic,” and that the normal pressure per unit length must vary as the principal curvature of the curve.
§ 11. Theory of Mass-Systems.—This is a purely geometrical subject. We consider a system of points P1, P2 ..., Pn, with which are associated certain coefficients m1, m2, ... mn, respectively. In the application to mechanics these coefficients are the masses of particles situate at the respective points, and are therefore all positive. We shall make this supposition in what follows, but it should be remarked that hardly any difference is made in the theory if some of the coefficients have a different sign from the rest, except in the special case where Σ(m) = 0. This has a certain interest in magnetism.
In a given mass-system there exists one and only one point G such that
Σ(m·GP>) = 0.
For, take any point O, and construct the vector
| OG> = | Σ(m·OP>) | . |
| Σ(m) |
Then
Σ(m·GP>) = Σ {m(GO> + OP>)} = Σ(m)·GO> + Σ(m)·OP> = 0.
Also there cannot be a distinct point G′ such that Σ(m·G′P) = 0, for we should have, by subtraction,
Σ {m(GP> + PG>′)} = 0, or Σ(m)·GG′ = 0;
i.e. G′ must coincide with G. The point G determined by (1) is called the mass-centre or centre of inertia of the given system. It is easily seen that, in the process of determining the mass-centre, any group of particles may be replaced by a single particle whose mass is equal to that of the group, situate at the mass-centre of the group.
If through P1, P2, ... Pn we draw any system of parallel planes meeting a straight line OX in the points M1, M2 ... Mn, the collinear vectors OM>1, OM>2 ... OM>n may be called the “projections” of OP>1, OP>2, ... OP>n on OX. Let these projections be denoted algebraically by x1, x2, ... xn, the sign being positive or negative according as the direction is that of OX or the reverse. Since the projection of a vector-sum 972 is the sum of the projections of the several vectors, the equation (2) gives
| x = | Σ(mx) | , |
| Σ(m) |
if x be the projection of OG>. Hence if the Cartesian co-ordinates of P1, P2, ... Pn relative to any axes, rectangular or oblique be (x1, y1, z1), (x2, y2, z2), ..., (xn, yn, zn), the mass-centre (x, y, z) is determined by the formulae
| x = | Σ(mx) | , y = | Σ(my) | , z = | Σ(mz) | . |
| Σ(m) | Σ(m) | Σ(m) |
If we write x = x + ξ, y = y + η, z = z + ζ, so that ξ, η, ζ denote co-ordinates relative to the mass-centre G, we have from (6)
Σ(mξ) = 0, Σ(mη) = 0, Σ(mζ) = 0.
One or two special cases may be noticed. If three masses α, β, γ be situate at the vertices of a triangle ABC, the mass-centre of β and γ is at a point A′ in BC, such that β·BA′ = γ·A′C. The mass-centre (G) of α, β, γ will then divide AA′ so that α·AG = (β + γ) GA′. It is easily proved that
α : β : γ = ΔBGA : ΔGCA : ΔGAB;
also, by giving suitable values (positive or negative) to the ratios α : β : γ we can make G assume any assigned position in the plane ABC. We have here the origin of the “barycentric co-ordinates” of Möbius, now usually known as “areal” co-ordinates. If α + β + γ = 0, G is at infinity; if α = β = γ, G is at the intersection of the median lines of the triangle; if α : β : γ = a : b : c, G is at the centre of the inscribed circle. Again, if G be the mass-centre of four particles α, β, γ, δ situate at the vertices of a tetrahedron ABCD, we find
α : β : γ : δ = tetn GBCD : tetn GCDA : tetn GDAB : tetn GABC,
and by suitable determination of the ratios on the left hand we can make G assume any assigned position in space. If α + β + γ + δ = O, G is at infinity; if α = β = γ = δ, G bisects the lines joining the middle points of opposite edges of the tetrahedron ABCD; if α : β : γ : δ = ΔBCD : ΔCDA : ΔDAB : ΔABC, G is at the centre of the inscribed sphere.
If we have a continuous distribution of matter, instead of a system of discrete particles, the summations in (6) are to be replaced by integrations. Examples will be found in textbooks of the calculus and of analytical statics. As particular cases: the mass-centre of a uniform thin triangular plate coincides with that of three equal particles at the corners; and that of a uniform solid tetrahedron coincides with that of four equal particles at the vertices. Again, the mass-centre of a uniform solid right circular cone divides the axis in the ratio 3 : 1; that of a uniform solid hemisphere divides the axial radius in the ratio 3 : 5.
It is easily seen from (6) that if the configuration of a system of particles be altered by “homogeneous strain” (see Elasticity) the new position of the mass-centre will be at that point of the strained figure which corresponds to the original mass-centre.
The formula (2) shows that a system of concurrent forces represented by m1·OP>1, m2·OP>2, ... mn·OP>n will have a resultant represented hy Σ(m)·OG>. If we imagine O to recede to infinity in any direction we learn that a system of parallel forces proportional to m1, m2,... mn, acting at P1, P2 ... Pn have a resultant proportional to Σ(m) which acts always through a point G fixed relatively to the given mass-system. This contains the theory of the “centre of gravity” (§§ 4, 9). We may note also that if P1, P2, ... Pn, and P1′, P2′, ... Pn′ represent two configurations of the series of particles, then
Σ(m·PP>′) = Sigma(m)·GG>′,
where G, G′ are the two positions of the mass-centre. The forces m1·P>1P1′, m2·P>2P2′, ... mn·P>nPn′, considered as localized vectors, do not, however, as a rule reduce to a single resultant.
We proceed to the theory of the plane, axial and polar quadratic moments of the system. The axial moments have alone a dynamical significance, but the others are useful as subsidiary conceptions. If h1, h2, ... hn be the perpendicular distances of the particles from any fixed plane, the sum Σ(mh2) is the quadratic moment with respect to the plane. If p1, p2, ... pn be the perpendicular distances from any given axis, the sum Σ(mp2) is the quadratic moment with respect to the axis; it is also called the moment of inertia about the axis. If r1, r2, ... rn be the distances from a fixed point, the sum Σ(mr2) is the quadratic moment with respect to that point (or pole). If we divide any of the above quadratic moments by the total mass Σ(m), the result is called the mean square of the distances of the particles from the respective plane, axis or pole. In the case of an axial moment, the square root of the resulting mean square is called the radius of gyration of the system about the axis in question. If we take rectangular axes through any point O, the quadratic moments with respect to the co-ordinate planes are
Ix = Σ(mx2), Iy = Σ(my2), Iz = Σ(mz2);
those with respect to the co-ordinate axes are
Iyz = Σ {m (y2 + z2)}, Izx = Σ {m (z2 + x2)}, Ixy = Σ {m (x2 + y2)};
whilst the polar quadratic moment with respect to O is
I0 = Σ {m (x2 + y2 + z2)}.
We note that
Iyz = Iy + Iz, Izx = Iz + Ix, Ixy = Ix + Iy,
and
I0 = Ix + Iy + Iz = 1⁄2 (Iyz + Izx + Ixy).
In the case of continuous distributions of matter the summations in (9), (10), (11) are of course to be replaced by integrations. For a uniform thin circular plate, we find, taking the origin at its centre, and the axis of z normal to its plane, I0 = 1⁄2Ma2, where M is the mass and a the radius. Since Ix = Iy, Iz = 0, we deduce Izx = 1⁄2Ma2, Ixy = 1⁄2Ma2; hence the value of the squared radius of gyration is for a diameter 1⁄4a2, and for the axis of symmetry 1⁄2a2. Again, for a uniform solid sphere having its centre at the origin we find I0 = 3⁄5Ma2, Ix = Iy = Iz = 1⁄5Ma2, Iyz = Izx = lxy = 3⁄5Ma2; i.e. the square of the radius of gyration with respect to a diameter is 2⁄5a2. The method of homogeneous strain can be applied to deduce the corresponding results for an ellipsoid of semi-axes a, b, c. If the co-ordinate axes coincide with the principal axes, we find Ix = 1⁄5Ma2, Iy = 1⁄5Mb2, Iz = 1⁄5Mc2, whence Iyz = 1⁄5M (b2 + c2), &c.
If φ(x, y, z) be any homogeneous quadratic function of x, y, z, we have
Σ {mφ (x, y, z)} = Σ {mφ (x + ξ, y + η, z + ζ) }
= Σ {mφ (x, y, z)} + Σ {mφ (ξ, η, ζ)},
since the terms which are bilinear in respect to x, y, z, and ξ, η, ζ vanish, in virtue of the relations (7). Thus
Ix = Iξ + Σ(m)x2,
Iyz = Iηζ + Σ(m) · (y2 + z2),
with similar relations, and
IO = IG + Σ(m) · OG2.
The formula (16) expresses that the squared radius of gyration about any axis (Ox) exceeds the squared radius of gyration about a parallel axis through G by the square of the distance between the two axes. The formula (17) is due to J. L. Lagrange; it may be written
| Σ(m · OP2) | = | Σ(m · GP2) | + OG2, |
| Σ(m) | Σ(m) |
and expresses that the mean square of the distances of the particles from O exceeds the mean square of the distances from G by OG2. The mass-centre is accordingly that point the mean square of whose distances from the several particles is least. If in (18) we make O coincide with P1, P2, ... Pn in succession, we obtain
| 0 | + m2·P1P22 | + ... | + mn·P1Pn2 | = Σ(m · GP2) + Σ(m) · GP12, |
| m1·P2P12 | + 0 | + ... | + mn·P2Pn2 | = Σ(m · GP2) + Σ(m) · GP22, |
| ......... | ||||
| m1·PnP12 | + m2·PnP22 | + ... | + 0 | = Σ(m · GP2) + Σ(m) · GPn2. |
If we multiply these equations by m1, m2 ... mn, respectively, and add, we find
ΣΣ (mrms · PrPs2) = Σ (m) · Σ (m · GP2),
provided the summation ΣΣ on the left hand be understood to include each pair of particles once only. This theorem, also due to Lagrange, enables us to express the mean square of the distances of the particles from the centre of mass in terms of the masses and mutual distances. For instance, considering four equal particles at the vertices of a regular tetrahedron, we can infer that the radius R of the circumscribing sphere is given by R2 = 3⁄8a2, if a be the length of an edge.
Another type of quadratic moment is supplied by the deviation-moments, or products of inertia of a distribution of matter. Thus the sum Σ(m·yz) is called the “product of inertia” with respect to the planes y = 0, z = 0. This may be expressed In terms of the product of inertia with respect to parallel planes through G by means of the formula (14); viz.:—
Σ (m · yz) = Σ (m · ηζ) + Σ (m) · yz
The quadratic moments with respect to different planes through a fixed point O are related to one another as follows. The moment with respect to the plane
λx + μy + νz = 0,
where λ, μ, ν are direction-cosines, is
Σ {m (λx + μy + νz)2} = Σ (mx2)·λ2 + Σ (my2)·μ2 + Σ (mz2)·ν2 + 2Σ (myz)·μν + 2Σ (mzx)·νλ + 2Σ (mxy)·λμ,
and therefore varies as the square of the perpendicular drawn from O to a tangent plane of a certain quadric surface, the tangent plane in question being parallel to (22). If the co-ordinate axes coincide with the principal axes of this quadric, we shall have
Σ(myz) = 0, Σ(mzx) = 0, Σ(mxy) = 0;
and if we write
Σ(mx2) = Ma2, Σ(my2) = Mb2, Σ(mz2) = Mc2,
where M = Σ(m), the quadratic moment becomes M(a2λ2 + b2μ2 + c2ν2), or Mp2, where p is the distance of the origin from that tangent plane of the ellipsoid
| x2 | + | y2 | + | z2 | = 1, |
| a2 | b2 | c2 |
which is parallel to (22). It appears from (24) that through any assigned point O three rectangular axes can be drawn such that the product of inertia with respect to each pair of co-ordinate planes vanishes; these are called the principal axes of inertia at O. The ellipsoid (26) was first employed by J. Binet (1811), and may be called “Binet’s Ellipsoid” for the point O. Evidently the quadratic moment for a variable plane through O will have a “stationary” value when, and only when, the plane coincides with a principal plane of (26). It may further be shown that if Binet’s ellipsoid be referred to any system of conjugate diameters as co-ordinate axes, its equation will be
| x′2 | + | y′2 | + | z′2 | = 1, |
| a′2 | b′2 | c′2 |
provided
Σ(mx′2) = Ma′2, Σ(my′2) Mb′2, Σ(mz′2) = Mc′2;
also that
Σ(my′z′) = 0, Σ(mz′x′) = 0, Σ(mx′y′) = 0.
Let us now take as co-ordinate axes the principal axes of inertia at the mass-centre G. If a, b, c be the semi-axes of the Binet’s ellipsoid of G, the quadratic moment with respect to the plane λx + μy + νz = 0 will be M(a2λ2 + b2μ2 + c2ν2), and that with respect to a parallel plane
λx + μy + νz = p
will be M (a2λ2 + b2μ2 + c2ν2 + p2), by (15). This will have a given value Mk2, provided
p2 = (k2 − a2) λ2 + (k2 − b2) μ2 + (k2 − c2) ν2.
Hence the planes of constant quadratic moment Mk2 will envelop the quadric
| x2 | + | y2 | + | z2 | = 1, |
| k2 − a2 | k2 − b2 | k2 − c2 |
and the quadrics corresponding to different values of k2 will be confocal. If we write
k2 = a2 + b2 + c2 + θ,
b2 + c2 = α2, c2 + a2 = β2, a2 + b2 = γ2
the equation (31) becomes
| x2 | + | y2 | + | z2 | = 1; |
| α2 + θ | β2 + θ | γ2 + θ |
for different values of θ this represents a system of quadrics confocal with the ellipsoid
| x2 | + | y2 | + | z2 | = 1, |
| α2 | β2 | γ2 |
which we shall meet with presently as the “ellipsoid of gyration” at G. Now consider the tangent plane ω at any point P of a confocal, the tangent plane ω′ at an adjacent point N′, and a plane ω″ through P parallel to ω′. The distance between the planes ω′ and ω″ will be of the second order of small quantities, and the quadratic moments with respect to ω′ and ω″ will therefore be equal, to the first order. Since the quadratic moments with respect to ω and ω′ are equal, it follows that ω is a plane of stationary quadratic moment at P, and therefore a principal plane of inertia at P. In other words, the principal axes of inertia at P arc the normals to the three confocals of the system (33) which pass through P. Moreover if x, y, z be the co-ordinates of P, (33) is an equation to find the corresponding values of θ; and if θ1, θ2, θ3 be the roots we find
θ1 + θ2 + θ3 = r2 − α2 − β2 − γ2,
where r2 = x2 + y2 + z2. The squares of the radii of gyration about the principal axes at P may be denoted by k22 + k32, k32 + k12, k12 + k22; hence by (32) and (35) they are r2 −θ1, r2 − θ2, r2 − θ3, respectively.
To find the relations between the moments of inertia about different axes through any assigned point O, we take O as origin. Since the square of the distance of a point (x, y, z) from the axis
| x | = | y | = | z |
| λ | μ | ν |
is x2 + y2 + z2 − (λx + μy + νz)2, the moment of inertia about this axis is
I = Σ [m { (λ2 + μ2 + ν2) (x2 + y2 + z2) − (λx + μy + νz)2} ]
= Aλ2 + Bμ2 + Cν2 − 2Fμν − 2Gνλ − 2Hλμ,
provided
A = Σ {m (y2 + z2)}, B = Σ {m (z2 + x2)}, C = Σ {m (x2 + y2)},
F = Σ (myz), G = Σ (mzx), H = Σ (mxy);
i.e. A, B, C are the moments of inertia about the co-ordinate axes, and F, G, H are the products of inertia with respect to the pairs of co-ordinate planes. If we construct the quadric
Ax2 + By2 + Cz2 − 2Fyz − 2Gzx − 2Hxy = Mε4
where ε is an arbitrary linear magnitude, the intercept r which it makes on a radius drawn in the direction λ, μ, ν is found by putting x, y, z = λr, μr, νr. Hence, by comparison with (37),
I = Mε4 / r2.
The moment of inertia about any radius of the quadric (39) therefore varies inversely as the square of the length of this radius. When referred to its principal axes, the equation of the quadric takes the form
Ax2 + By2 + Cz2 = Mε4.
The directions of these axes are determined by the property (24), and therefore coincide with those of the principal axes of inertia at O, as already defined in connexion with the theory of plane quadratic moments. The new A, B, C are called the principal moments of inertia at O. Since they are essentially positive the quadric is an ellipsoid; it is called the momental ellipsoid at O. Since, by (12), B + C > A, &c., the sum of the two lesser principal moments must exceed the greatest principal moment. A limitation is thus imposed on the possible forms of the momental ellipsoid; e.g. in the case of symmetry about an axis it appears that the ratio of the polar to the equatorial diameter of the ellipsoid cannot be less than 1/√2.
If we write A = Mα2, B = Mβ2, C = Mγ2, the formula (37), when referred to the principal axes at O, becomes
I = M (α2λ2 + β2μ2 + γ2ν2) = Mp2,
if p denotes the perpendicular drawn from O in the direction (λ, μ, ν) to a tangent plane of the ellipsoid
| x2 | + | y2 | + | z2 | = 1 |
| α2 | β2 | γ2 |
This is called the ellipsoid of gyration at O; it was introduced into the theory by J. MacCullagh. The ellipsoids (41) and (43) are reciprocal polars with respect to a sphere having O as centre.
If A = B = C, the momental ellipsoid becomes a sphere; all axes through O are then principal axes, and the moment of inertia is the same for each. The mass-system is then said to possess kinetic symmetry about O.
If all the masses lie in a plane (z = 0) we have, in the notation of (25), c2 = 0, and therefore A = Mb2, B = Ma2, C = M(a2 + b2), so that the equation of the momental ellipsoid takes the form
b2x2 + a2y2 + (a2 + b2) z2 = ε4.
The section of this by the plane z = 0 is similar to
| x2 | + | y2 | = 1, |
| a2 | b2 |
which may be called the momental ellipse at O. It possesses the property that the radius of gyration about any diameter is half the distance between the two tangents which are parallel to that diameter. In the case of a uniform triangular plate it may be shown that the momental ellipse at G is concentric, similar and similarly situated 974 to the ellipse which touches the sides of the triangle at their middle points.
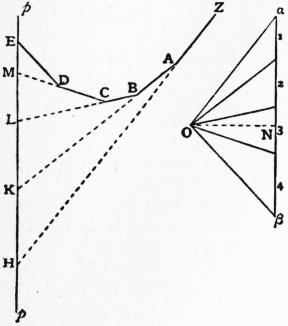 |
| Fig. 59. |
The graphical methods of determining the moment of inertia of a plane system of particles with respect to any line in its plane may be briefly noticed. It appears from § 5 (fig. 31) that the linear moment of each particle about the line may be found by means of a funicular polygon. If we replace the mass of each particle by its moment, as thus found, we can in like manner obtain the quadratic moment of the system with respect to the line. For if the line in question be the axis of y, the first process gives us the values of mx, and the second the value of Σ(mx·x) or Σ(mx2). The construction of a second funicular may be dispensed with by the employment of a planimeter, as follows. In fig. 59 p is the line with respect to which moments are to be taken, and the masses of the respective particles are indicated by the corresponding segments of a line in the force-diagram, drawn parallel to p. The funicular ZABCD ... corresponding to any pole O is constructed for a system of forces acting parallel to p through the positions of the particles and proportional to the respective masses; and its successive sides are produced to meet p in the points H, K, L, M, ... As explained in § 5, the moment of the first particle is represented on a certain scale by HK, that of the second by KL, and so on. The quadratic moment of the first particle will then be represented by twice the area AHK, that of the second by twice the area BKL, and so on. The quadratic moment of the whole system is therefore represented by twice the area AHEDCBA. Since a quadratic moment is essentially positive, the various areas are to taken positive in all cases. If k be the radius of gyration about p we find
k2 = 2 × area AHEDCBA × ON ÷ αβ,
 |
| Fig. 60. |
where αβ is the line in the force-diagram which represents the sum of the masses, and ON is the distance of the pole O from this line. If some of the particles lie on one side of p and some on the other, the quadratic moment of each set may be found, and the results added. This is illustrated in fig. 60, where the total quadratic moment is represented by the sum of the shaded areas. It is seen that for a given direction of p this moment is least when p passes through the intersection X of the first and last sides of the funicular; i.e. when p goes through the mass-centre of the given system; cf. equation (15).
Part II.—Kinetics
§ 12. Rectilinear Motion.—Let x denote the distance OP of a moving point P at time t from a fixed origin O on the line of motion, this distance being reckoned positive or negative according as it lies to one side or the other of O. At time t + δt let the point be at Q, and let OQ = x + δx. The mean velocity of the point in the interval δt is δx/δt. The limiting value of this when δt is infinitely small, viz. dx/dt, is adopted as the definition of the velocity at the instant t. Again, let u be the velocity at time t, u + δu that at time t + δt. The mean rate of increase of velocity, or the mean acceleration, in the interval δt is then δu/δt. The limiting value of this when δt is infinitely small, viz., du/dt, is adopted as the definition of the acceleration at the instant t. Since u = dx/dt, the acceleration is also denoted by d2x/dt2. It is often convenient to use the “fluxional” notation for differential coefficients with respect to time; thus the velocity may be represented by ẋ and the acceleration by u̇ or ẍ. There is another formula for the acceleration, in which u is regarded as a function of the position; thus du/dt = (du/dx) (dx/dt) = u(du/dx). The relation between x and t in any particular case may be illustrated by means of a curve constructed with t as abscissa and x as ordinate. This is called the curve of positions or space-time curve; its gradient represents the velocity. Such curves are often traced mechanically in acoustical and other experiments. A, curve with t as abscissa and u as ordinate is called the curve of velocities or velocity-time curve. Its gradient represents the acceleration, and the area (∫u dt) included between any two ordinates represents the space described in the interval between the corresponding instants (see fig. 62).
So far nothing has been said about the measurement of time. From the purely kinematic point of view, the t of our formulae may be any continuous independent variable, suggested (it may be) by some physical process. But from the dynamical standpoint it is obvious that equations which represent the facts correctly on one system of time-measurement might become seriously defective on another. It is found that for almost all purposes a system of measurement based ultimately on the earth’s rotation is perfectly adequate. It is only when we come to consider such delicate questions as the influence of tidal friction that other standards become necessary.
The most important conception in kinetics is that of “inertia.” It is a matter of ordinary observation that different bodies acted on by the same force, or what is judged to be the same force, undergo different changes of velocity in equal times. In our ideal representation of natural phenomena this is allowed for by endowing each material particle with a suitable mass or inertia-coefficient m. The product mu of the mass into the velocity is called the momentum or (in Newton’s phrase) the quantity of motion. On the Newtonian system the motion of a particle entirely uninfluenced by other bodies, when referred to a suitable base, would be rectilinear, with constant velocity. If the velocity changes, this is attributed to the action of force; and if we agree to measure the force (X) by the rate of change of momentum which it produces, we have the equation
| d | (mu) = X. |
| dt |
From this point of view the equation is a mere truism, its real importance resting on the fact that by attributing suitable values to the masses m, and by making simple assumptions as to the value of X in each case, we are able to frame adequate representations of whole classes of phenomena as they actually occur. The question remains, of course, as to how far the measurement of force here implied is practically consistent with the gravitational method usually adopted in statics; this will be referred to presently.
The practical unit or standard of mass must, from the nature of the case, be the mass of some particular body, e.g. the imperial pound, or the kilogramme. In the “C.G.S.” system a subdivision of the latter, viz. the gramme, is adopted, and is associated with the centimetre as the unit of length, and the mean solar second as the unit of time. The unit of force implied in (1) is that which produces unit momentum in unit time. On the C.G.S. system it is that force which acting on one gramme for one second produces a velocity of one centimetre per second; this unit is known as the dyne. Units of this kind are called absolute on account of their fundamental and invariable character as contrasted with gravitational units, which (as we shall see presently) vary somewhat with the locality at which the measurements are supposed to be made.
If we integrate the equation (1) with respect to t between the limits t, t′ we obtain
mu′ − mu = ∫t′t X dt.
The time-integral on the right hand is called the impulse of the force on the interval t′ − t. The statement that the increase of 975 momentum is equal to the impulse is (it maybe remarked) equivalent to Newton’s own formulation of his Second Law. The form (1) is deduced from it by putting t′ − t = δt, and taking δt to be infinitely small. In problems of impact we have to deal with cases of practically instantaneous impulse, where a very great and rapidly varying force produces an appreciable change of momentum in an exceedingly minute interval of time.
In the case of a constant force, the acceleration u̇ or ẍ is, according to (1), constant, and we have
| d2x | = α, |
| dt2 |
say, the general solution of which is
x = 1⁄2 αt2 + At + B.
The “arbitrary constants” A, B enable us to represent the circumstances of any particular case; thus if the velocity ẋ and the position x be given for any one value of t, we have two conditions to determine A, B. The curve of positions corresponding to (4) is a parabola, and that of velocities is a straight line. We may take it as an experimental result, although the best evidence is indirect, that a particle falling freely under gravity experiences a constant acceleration which at the same place is the same for all bodies. This acceleration is denoted by g; its value at Greenwich is about 981 centimetre-second units, or 32.2 feet per second. It increases somewhat with the latitude, the extreme variation from the equator to the pole being about 1⁄2%. We infer that on our reckoning the force of gravity on a mass m is to be measured by mg, the momentum produced per second when this force acts alone. Since this is proportional to the mass, the relative masses to be attributed to various bodies can be determined practically by means of the balance. We learn also that on account of the variation of g with the locality a gravitational system of force-measurement is inapplicable when more than a moderate degree of accuracy is desired.
We take next the case of a particle attracted towards a fixed point O in the line of motion with a force varying as the distance from that point. If μ be the acceleration at unit distance, the equation of motion becomes
| d2x | = −μx, |
| dt2 |
the solution of which may be written in either of the forms
x = A cos σt + B sin σt, x = a cos (σt + ε),
 |
| Fig. 61. |
where σ= √μ, and the two constants A, B or a, ε are arbitrary. The particle oscillates between the two positions x = ±a, and the same point is passed through in the same direction with the same velocity at equal intervals of time 2π/σ. The type of motion represented by (6) is of fundamental importance in the theory of vibrations (§ 23); it is called a simple-harmonic or (shortly) a simple vibration. If we imagine a point Q to describe a circle of radius a with the angular velocity σ, its orthogonal projection P on a fixed diameter AA′ will execute a vibration of this character. The angle σt + ε (or AOQ) is called the phase; the arbitrary elements a, ε are called the amplitude and epoch (or initial phase), respectively. In the case of very rapid vibrations it is usual to specify, not the period (2π/σ), but its reciprocal the frequency, i.e. the number of complete vibrations per unit time. Fig. 62 shows the curves of position and velocity; they both have the form of the “curve of sines.” The numbers correspond to an amplitude of 10 centimetres and a period of two seconds.
The vertical oscillations of a weight which hangs from a fixed point by a spiral spring come under this case. If M be the mass, and x the vertical displacement from the position of equilibrium, the equation of motion is of the form
| M | d2x | = − Kx, |
| dt2 |
provided the inertia of the spring itself be neglected. This becomes identical with (5) if we put μ = K/M; and the period is therefore 2π√(M/K), the same for all amplitudes. The period is increased by an increase of the mass M, and diminished by an increase in the stiffness (K) of the spring. If c be the statical increase of length which is produced by the gravity of the mass M, we have Kc = Mg, and the period is 2π√(c/g).
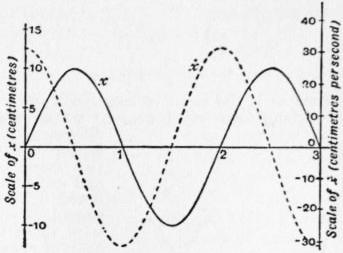 |
| Fig. 62. |
The small oscillations of a simple pendulum in a vertical plane also come under equation (5). According to the principles of § 13, the horizontal motion of the bob is affected only by the horizontal component of the force acting upon it. If the inclination of the string to the vertical does not exceed a few degrees, the vertical displacement of the particle is of the second order, so that the vertical acceleration may be neglected, and the tension of the string may be equated to the gravity mg of the particle. Hence if l be the length of the string, and x the horizontal displacement of the bob from the equilibrium position, the horizontal component of gravity is mgx/l, whence
| d2x | = − | gx | , |
| dt2 | l |
The motion is therefore simple-harmonic, of period τ = 2π√(l/g). This indicates an experimental method of determining g with considerable accuracy, using the formula g = 4π2l/τ2.
In the case of a repulsive force varying as the distance from the origin, the equation of motion is of the type
| d2x | = μx, |
| dt2 |
the solution of which is
x = Aent + Be−nt,
where n = √μ. Unless the initial conditions be adjusted so as to make A = 0 exactly, x will ultimately increase indefinitely with t. The position x = 0 is one of equilibrium, but it is unstable. This applies to the inverted pendulum, with μ = g/l, but the equation (9) is then only approximate, and the solution therefore only serves to represent the initial stages of a motion in the neighbourhood of the position of unstable equilibrium.
In acoustics we meet with the case where a body is urged towards a fixed point by a force varying as the distance, and is also acted upon by an “extraneous” or “disturbing” force which is a given function of the time. The most important case is where this function is simple-harmonic, so that the equation (5) is replaced by
| d2x | + μx = ƒ cos (σ1t + α), |
| dt2 |
where σ1 is prescribed. A particular solution is
| x = | ƒ | cos (σ1t + α). |
| μ − σ12 |
This represents a forced oscillation whose period 2π/σ1, coincides with that of the disturbing force; and the phase agrees with that of the force, or is opposed to it, according as σ12 < or > μ; i.e. according as the imposed period is greater or less than the natural period 2π/√μ. The solution fails when the two periods agree exactly; the formula (12) is then replaced by
| x = | ƒt | sin (σ1t + α), |
| 2σ1 |
which represents a vibration of continually increasing amplitude. Since the equation (12) is in practice generally only an approximation (as in the case of the pendulum), this solution can only 976 be accepted as a representation of the initial stages of the forced oscillation. To obtain the complete solution of (11) we must of course superpose the free vibration (6) with its arbitrary constants in order to obtain a complete representation of the most general motion consequent on arbitrary initial conditions.
A simple mechanical illustration is afforded by the pendulum. If the point of suspension have an imposed simple vibration ξ = a cos σt in a horizontal line, the equation of small motion of the bob is
| mẍ = −mg | x − ξ | , |
| l |
or
| ẍ + | gx | = g | ξ | . |
| l | l |
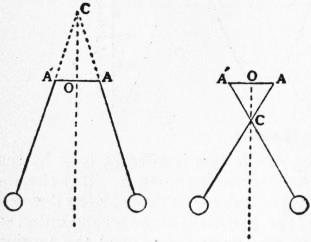 |
| Fig. 63. |
This is the same as if the point of suspension were fixed, and a horizontal disturbing force mgξ/l were to act on the bob. The difference of phase of the forced vibration in the two cases is illustrated and explained in the annexed fig. 63, where the pendulum virtually oscillates about C as a fixed point of suspension. This illustration was given by T. Young in connexion with the kinetic theory of the tides, where the same point arises.
We may notice also the case of an attractive force varying inversely as the square of the distance from the origin. If μ be the acceleration at unit distance, we have
| u | du | = − | μ |
| dx | x2 |
whence
| u2 = | 2μ | + C. |
| x |
In the case of a particle falling directly towards the earth from rest at a very great distance we have C = 0 and, by Newton’s Law of Gravitation, μ/a2 = g, where a is the earth’s radius. The deviation of the earth’s figure from sphericity, and the variation of g with latitude, are here ignored. We find that the velocity with which the particle would arrive at the earth’s surface (x = a) is √(2ga). If we take as rough values a = 21 × 106 feet, g = 32 foot-second units, we get a velocity of 36,500 feet, or about seven miles, per second. If the particles start from rest at a finite distance c, we have in (16), C = − 2μ/c, and therefore
| dx | = u = − √ { | 2μ (c − x) | }, |
| dt | cx |
the minus sign indicating motion towards the origin. If we put x = c cos2 1⁄2φ, we find
| t = | c3/2 | (φ + sin φ), |
| √(8μ) |
no additive constant being necessary if t be reckoned from the instant of starting, when φ = 0. The time t of reaching the origin (φ = π) is
| t1 = | π c3/2 | . |
| √(8μ) |
This may be compared with the period of revolution in a circular orbit of radius c about the same centre of force, viz. 2πc3/2 / √μ (§ 14). We learn that if the orbital motion of a planet, or a satellite, were arrested, the body would fall into the sun, or into its primary, in the fraction 0.1768 of its actual periodic time. Thus the moon would reach the earth in about five days. It may be noticed that if the scales of x and t be properly adjusted, the curve of positions in the present problem is the portion of a cycloid extending from a vertex to a cusp.
In any case of rectilinear motion, if we integrate both sides of the equation
| mu | du | = X, |
| dx |
which is equivalent to (1), with respect to x between the limits x0, x1, we obtain
1⁄2 mu12 − 1⁄2 mu02 = ∫x1x0 X dx.
We recognize the right-hand member as the work done by the force X on the particle as the latter moves from the position x0 to the position x1. If we construct a curve with x as abscissa and X as ordinate, this work is represented, as in J. Watt’s “indicator-diagram,” by the area cut off by the ordinates x = x0, x = x1. The product 1⁄2mu2 is called the kinetic energy of the particle, and the equation (21) is therefore equivalent to the statement that the increment of the kinetic energy is equal to the work done on the particle. If the force X be always the same in the same position, the particle may be regarded as moving in a certain invariable “field of force.” The work which would have to be supplied by other forces, extraneous to the field, in order to bring the particle from rest in some standard position P0 to rest in any assigned position P, will depend only on the position of P; it is called the statical or potential energy of the particle with respect to the field, in the position P. Denoting this by V, we have δV − Xδx = 0, whence
| X = − | dV | . |
| dx |
The equation (21) may now be written
1⁄2 mu12 + V1 = 1⁄2 mu02 + V0,
which asserts that when no extraneous forces act the sum of the kinetic and potential energies is constant. Thus in the case of a weight hanging by a spiral spring the work required to increase the length by x is V = ∫x0 Kx dx = 1⁄2Kx2, whence 1⁄2Mu2 + 1⁄2Kx2 = const., as is easily verified from preceding results. It is easily seen that the effect of extraneous forces will be to increase the sum of the kinetic and potential energies by an amount equal to the work done by them. If this amount be negative the sum in question is diminished by a corresponding amount. It appears then that this sum is a measure of the total capacity for doing work against extraneous resistances which the particle possesses in virtue of its motion and its position; this is in fact the origin of the term “energy.” The product mv2 had been called by G. W. Leibnitz the “vis viva”; the name “energy” was substituted by T. Young; finally the name “actual energy” was appropriated to the expression 1⁄2mv2 by W. J. M. Rankine.
The laws which regulate the resistance of a medium such as air to the motion of bodies through it are only imperfectly known. We may briefly notice the case of resistance varying as the square of the velocity, which is mathematically simple. If the positive direction of x be downwards, the equation of motion of a falling particle will be of the form
| du | = g − ku2; |
| dt |
this shows that the velocity u will send asymptotically to a certain limit V (called the terminal velocity) such that kV2 = g. The solution is
| u = V tanh | gt | , x = | V2 | log cosh | gt | , |
| V | g | V |
if the particle start from rest in the position x = 0 at the instant t = 0. In the case of a particle projected vertically upwards we have
| du | = −g − ku2, |
| dt |
the positive direction being now upwards. This leads to
| tan−1 | u | = tan−1 | u0 | − | gt | , x = | V2 | log | V2 + u02 | , |
| V | V | V | 2g | V2 + u2 |
where u0 is the velocity of projection. The particle comes to rest when
| t = | V | tan−1 | u0 | , x = | V2 | log ( 1 + | u02 | ). |
| g | V | 2g | V2 |
For small velocities the resistance of the air is more nearly proportional to the first power of the velocity. The effect of forces of this type on small vibratory motions may be investigated as follows. The equation (5) when modified by the introduction of a frictional term becomes
ẍ = −μx − kẋ.
If k2 < 4μ the solution is
x = a e−t/τ cos (σt + ε),
where
τ = 2/k, σ = √(μ − 1⁄4k2),
and the constants a, ε are arbitrary. This may be described as a simple harmonic oscillation whose amplitude diminishes asymptotically to zero according to the law e−t/τ. The constant τ is called the modulus of decay of the oscillations; if it is large compared with 2π/σ the effect of friction on the period is of the second order of small quantities and may in general be ignored. We have seen that 977 a true simple-harmonic vibration may be regarded as the orthogonal projection of uniform circular motion; it was pointed out by P. G. Tait that a similar representation of the type (30) is obtained if we replace the circle by an equiangular spiral described, with a constant angular velocity about the pole, in the direction of diminishing radius vector. When k2 > 4μ, the solution of (29) is, in real form,
x = a1e−t/τ1 + a2e−t/τ2,
where
1/τ1, 1/τ2 = 1⁄2k ± √(1⁄4k2 − μ).
The body now passes once (at most) through its equilibrium position, and the vibration is therefore styled aperiodic.
To find the forced oscillation due to a periodic force we have
ẍ + kẋ + μx = ƒ cos (σ1t + ε).
The solution is
| x = | ƒ | cos (σ1t + ε − ε1), |
| R |
provided
| R = { (μ − σ12)2 + k2σ12}1/2, tan ε1 = | kσ1 | . |
| μ − σ12 |
Hence the phase of the vibration lags behind that of the force by the amount ε1, which lies between 0 and 1⁄2π or between 1⁄2π and π, according as σ12 ≶ μ. If the friction be comparatively slight the amplitude is greatest when the imposed period coincides with the free period, being then equal to ƒ/kσ1, and therefore very great compared with that due to a slowly varying force of the same average intensity. We have here, in principle, the explanation of the phenomenon of “resonance” in acoustics. The abnormal amplitude is greater, and is restricted to a narrower range of frequency, the smaller the friction. For a complete solution of (34) we must of course superpose the free vibration (30); but owing to the factor e−t/τ the influence of the initial conditions gradually disappears.
For purposes of mathematical treatment a force which produces a finite change of velocity in a time too short to be appreciated is regarded as infinitely great, and the time of action as infinitely short. The whole effect is summed up in the value of the instantaneous impulse, which is the time-integral of the force. Thus if an instantaneous impulse ξ changes the velocity of a mass m from u to u′ we have
mu′ − mu = ξ.
The effect of ordinary finite forces during the infinitely short duration of this impulse is of course ignored.
We may apply this to the theory of impact. If two masses m1, m2 moving in the same straight line impinge, with the result that the velocities are changed from u1, u2, to u1′, u2′, then, since the impulses on the two bodies must be equal and opposite, the total momentum is unchanged, i.e.
m1u1′ + m2u2′ = m1u1 + m2u2.
The complete determination of the result of a collision under given circumstances is not a matter of abstract dynamics alone, but requires some auxiliary assumption. If we assume that there is no loss of apparent kinetic energy we have also
m1u1′2 + m2u2′2 = m1u12 + m2u22.
Hence, and from (38),
u2′ − u1′ = −(u2 − u1),
i.e. the relative velocity of the two bodies is reversed in direction, but unaltered in magnitude. This appears to be the case very approximately with steel or glass balls; generally, however, there is some appreciable loss of apparent energy; this is accounted for by vibrations produced in the balls and imperfect elasticity of the materials. The usual empirical assumption is that
u2′ − u1′ = −e (u2 − u1),
where e is a proper fraction which is constant for the same two bodies. It follows from the formula § 15 (10) for the internal kinetic energy of a system of particles that as a result of the impact this energy is diminished by the amount
| 1⁄2 (1 − e2) | m1m2 | (u1 − u2)2. |
| m1 + m2 |
The further theoretical discussion of the subject belongs to Elasticity.
This is perhaps the most suitable place for a few remarks on the theory of “dimensions.” (See also Units, Dimensions of.) In any absolute system of dynamical measurement the fundamental units are those of mass, length and time; we may denote them by the symbols M, L, T, respectively. They may be chosen quite arbitrarily, e.g. on the C.G.S. system they are the gramme, centimetre and second. All other units are derived from these. Thus the unit of velocity is that of a point describing the unit of length in the unit of time; it may be denoted by LT−1, this symbol indicating that the magnitude of the unit in question varies directly as the unit of length and inversely as the unit of time. The unit of acceleration is the acceleration of a point which gains unit velocity in unit time; it is accordingly denoted by LT−2. The unit of momentum is MLT−1; the unit force generates unit momentum in unit time and is therefore denoted by MLT−2. The unit of work on the same principles is ML2T−2, and it is to be noticed that this is identical with the unit of kinetic energy. Some of these derivative units have special names assigned to them; thus on the C.G.S. system the unit of force is called the dyne, and the unit of work or energy the erg. The number which expresses a physical quantity of any particular kind will of course vary inversely as the magnitude of the corresponding unit. In any general dynamical equation the dimensions of each term in the fundamental units must be the same, for a change of units would otherwise alter the various terms in different ratios. This principle is often useful as a check on the accuracy of an equation.
The theory of dimensions often enables us to forecast, to some extent, the manner in which the magnitudes involved in any particular problem will enter into the result. Thus, assuming that the period of a small oscillation of a given pendulum at a given place is a definite quantity, we see that it must vary as √(l/g). For it can only depend on the mass m of the bob, the length l of the string, and the value of g at the place in question; and the above expression is the only combination of these symbols whose dimensions are those of a time, simply. Again, the time of falling from a distance a into a given centre of force varying inversely as the square of the distance will depend only on a and on the constant μ of equation (15). The dimensions of μ/x2 are those of an acceleration; hence the dimensions of μ are L3T−2. Assuming that the time in question varies as axμy, whose dimensions are Lx+3yT−2y, we must have x + 3y = 0, −2y = 1, so that the time of falling will vary as a3/2/√μ, in agreement with (19).
The argument appears in a more demonstrative form in the theory of “similar” systems, or (more precisely) of the similar motion of similar systems. Thus, considering the equations
| d2x | = − | μ | , | d2x′ | = − | μ′ | , |
| dt2 | x2 | dt′2 | x′2 |
which refer to two particles falling independently into two distinct centres of force, it is obvious that it is possible to have x in a constant ratio to x′, and t in a constant ratio to t′, provided that
| x | : | x′ | = | μ | : | μ′ | , |
| t2 | t′2 | x2 | x′2 |
and that there is a suitable correspondence between the initial conditions. The relation (44) is equivalent to
| t : t′ = | x3/2 | : | x′3/2 | , |
| μ1/2 | μ′1/2 |
where x, x′ are any two corresponding distances; e.g. they may be the initial distances, both particles being supposed to start from rest. The consideration of dimensions was introduced by J. B. Fourier (1822) in connexion with the conduction of heat.
 |
| Fig. 64. |
§ 13. General Motion of a Particle.—Let P, Q be the positions of a moving point at times t, t + δt respectively. A vector OU> drawn parallel to PQ, of length proportional to PQ/δt on any convenient scale, will represent the mean velocity in the interval δt, i.e. a point moving with a constant velocity having the magnitude and direction indicated by this vector would experience the same resultant displacement PQ> in the same time. As δt is indefinitely diminished, the vector OU> will tend to a definite limit OV>; this is adopted as the definition 978 of the velocity of the moving point at the instant t. Obviously OV> is parallel to the tangent to the path at P, and its magnitude is ds/dt, where s is the arc. If we project OV> on the co-ordinate axes (rectangular or oblique) in the usual manner, the projections u, v, w are called the component velocities parallel to the axes. If x, y, z be the co-ordinates of P it is easily proved that
| u = | dx | , v = | dy | , w = | dz | . |
| dt | dt | dt |
The momentum of a particle is the vector obtained by multiplying the velocity by the mass m. The impulse of a force in any infinitely small interval of time δt is the product of the force into δt; it is to be regarded as a vector. The total impulse in any finite interval of time is the integral of the impulses corresponding to the infinitesimal elements δt into which the interval may be subdivided; the summation of which the integral is the limit is of course to be understood in the vectorial sense.
Newton’s Second Law asserts that change of momentum is equal to the impulse; this is a statement as to equality of vectors and so implies identity of direction as well as of magnitude. If X, Y, Z are the components of force, then considering the changes in an infinitely short time δt we have, by projection on the co-ordinate axes, δ(mu) = Xδt, and so on, or
| m | du | = X, m | dv | = Y, m | dw | = Z. |
| dt | dt | dt |
For example, the path of a particle projected anyhow under gravity will obviously be confined to the vertical plane through the initial direction of motion. Taking this as the plane xy, with the axis of x drawn horizontally, and that of y vertically upwards, we have X = 0, Y = −mg; so that
| d2x | = 0, | d2y | = −g. |
| dt2 | dt2 |
The solution is
x = At + B, y = −1⁄2gt2 + Ct + D.
If the initial values of x, y, ẋ, ẏ are given, we have four conditions to determine the four arbitrary constants A, B, C, D. Thus if the particle start at time t = 0 from the origin, with the component velocities u0, v0, we have
x = u0t, y = v0t − 1⁄2gt2.
Eliminating t we have the equation of the path, viz.
| y = | v0 | x − | gx2 | . |
| u0 | 2u2 |
This is a parabola with vertical axis, of latus-rectum 2u02/g. The range on a horizontal plane through O is got by putting y = 0, viz. it is 2u0v0/g. we denote the resultant velocity at any instant by ṡ we have
ṡ2 = ẋ2 + ẏ2 = ṡ02 − 2gy.
Another important example is that of a particle subject to an acceleration which is directed always towards a fixed point O and is proportional to the distance from O. The motion will evidently be in one plane, which we take as the plane z = 0. If μ be the acceleration at unit distance, the component accelerations parallel to axes of x and y through O as origin will be −μx, −μy, whence
| d2x | = −μx, | d2y | = − μy. |
| dt2 | dt2 |
The solution is
x = A cos nt + B sin nt, y = C cos nt + D sin nt,
where n = √μ. If P be the initial position of the particle, we may conveniently take OP as axis of x, and draw Oy parallel to the direction of motion at P. If OP = a, and ṡ0 be the velocity at P, we have, initially, x = a, y = 0, ẋ = 0, ẏ = ṡ0 whence
x = a cos nt, y = b sin nt,
if b = ṡ0/n. The path is therefore an ellipse of which a, b are conjugate semi-diameters, and is described in the period 2π/√μ; moreover, the velocity at any point P is equal to √μ·OD, where OD is the semi-diameter conjugate to OP. This type of motion is called elliptic harmonic. If the co-ordinate axes are the principal axes of the ellipse, the angle nt in (10) is identical with the “excentric angle.” The motion of the bob of a “spherical pendulum,” i.e. a simple pendulum whose oscillations are not confined to one vertical plane, is of this character, provided the extreme inclination of the string to the vertical be small. The acceleration is towards the vertical through the point of suspension, and is equal to gr/l, approximately, if r denote distance from this vertical. Hence the path is approximately an ellipse, and the period is 2π √(l/g).
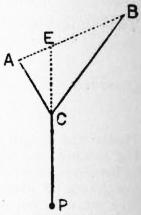 |
 |
| Fig. 65. | Fig. 66. |
The above problem is identical with that of the oscillation of a particle in a smooth spherical bowl, in the neighbourhood of the lowest point. If the bowl has any other shape, the axes Ox, Oy may be taken tangential to the lines of curvature at the lowest point O; the equations of small motion then are
| d2x | = −g | x | , | d2y | = −g | y | , |
| dt2 | ρ1 | dt2 | ρ2 |
where ρ1, ρ2, are the principal radii of curvature at O. The motion is therefore the resultant of two simple vibrations in perpendicular directions, of periods 2π √(ρ1/g), 2π √(ρ2/g). The circumstances are realized in “Blackburn’s pendulum,” which consists of a weight P hanging from a point C of a string ACB whose ends A, B are fixed. If E be the point in which the line of the string meets AB, we have ρ1 = CP, ρ2 = EP. Many contrivances for actually drawing the resulting curves have been devised.
It is sometimes convenient to resolve the accelerations in directions having a more intrinsic relation to the path. Thus, in a plane path, let P, Q be two consecutive positions, corresponding to the times t, t + δt; and let the normals at P, Q meet in C, making an angle δψ. Let v (= ṡ) be the velocity at P, v + δv that at Q. In the time δt the velocity parallel to the tangent at P changes from v to v + δv, ultimately, and the tangential acceleration at P is therefore dv/dt or s̈. Again, the velocity parallel to the normal at P changes from 0 to vδψ, ultimately, so that the normal acceleration is v dψ/dt. Since
| dv | = | dv | ds | = v | dv | , v | dψ | = v | dψ | ds | = | v2 | , | ||
| dt | ds | dt | ds | dt | ds | dt | ρ |
where ρ is the radius of curvature of the path at P, the tangential and normal accelerations are also expressed by v dv/ds and v2/ρ, respectively. Take, for example, the case of a particle moving on a smooth curve in a vertical plane, under the action of gravity and the pressure R of the curve. If the axes of x and y be drawn horizontal and vertical (upwards), and if ψ be the inclination of the tangent to the horizontal, we have
| mv | dv | = − mg sin ψ = − mg | dy | , | mv2 | = − mg cos ψ + R. |
| ds | ds | ρ |
The former equation gives
v2 = C − 2gy,
and the latter then determines R.
In the case of the pendulum the tension of the string takes the place of the pressure of the curve. If l be the length of the string, ψ its inclination to the downward vertical, we have δs = lδψ, so that v = ldψ/dt. The tangential resolution then gives
| l | d2ψ | = − g sin ψ. |
| dt2 |
If we multiply by 2dψ/dt and integrate, we obtain
| ( | dψ | )2 = | 2g | cos ψ + const., |
| dt | l |
which is seen to be equivalent to (14). If the pendulum oscillate between the limits ψ = ±α, we have
| ( | δψ | )2 = | 2g | (cos ψ − cos α) = | 4g | (sin2 1⁄2α − sin2 1⁄2ψ); |
| dt | l | l |
and, putting sin 1⁄2ψ = sin 1⁄2α. sin φ, we find for the period (τ) of a complete oscillation
| τ = 4 ∫1⁄2π0 | dt | dφ = 4√ | l | · ∫1⁄2π0 | dφ |
| dφ | g | √(1 − sin2 1⁄2α · sin2 φ) |
| = 4√ | l | · F1 (sin 1⁄2α), |
| g |
in the notation of elliptic integrals. The function F1 (sin β) was tabulated by A. M. Legendre for values of β ranging from 0° to 90°. The following table gives the period, for various amplitudes α, in terms of that of oscillation in an infinitely small arc [viz. 2π√(l/g)] as unit.
| α/π | τ | α/π | τ |
| .1 | 1.0062 | .6 | 1.2817 |
| .2 | 1.0253 | .7 | 1.4283 |
| .3 | 1.0585 | .8 | 1.6551 |
| .4 | 1.1087 | .9 | 2.0724 |
| .5 | 1.1804 | 1.0 | ∞ |
The value of τ can also be obtained as an infinite series, by expanding the integrand in (18) by the binomial theorem, and integrating term by term. Thus
| τ = 2π √ | l | · { 1 + | 12 | sin2 1⁄2α + | 12 · 32 | sin4 1⁄2α + ... }. |
| g | 22 | 22 · 42 |
If α be small, an approximation (usually sufficient) is
τ = 2π √(l/g) · (1 + 1⁄16α2).
In the extreme case of α = π, the equation (17) is immediately integrable; thus the time from the lowest position is
t = √(l/g) · log tan (1⁄4π + 1⁄4ψ).
This becomes infinite for ψ = π, showing that the pendulum only tends asymptotically to the highest position.
The variation of period with amplitude was at one time a hindrance to the accurate performance of pendulum clocks, since the errors produced are cumulative. It was therefore sought to replace the circular pendulum by some other contrivance free from this defect. The equation of motion of a particle in any smooth path is
| d2s | = −g sin ψ, |
| dt2 |
where ψ is the inclination of the tangent to the horizontal. If sin ψ were accurately and not merely approximately proportional to the arc s, say
s = k sin ψ,
 |
| Fig. 67. |
the equation (21) would assume the same form as § 12 (5). The motion along the arc would then be accurately simple-harmonic, and the period 2π √(k/g) would be the same for all amplitudes. Now equation (22) is the intrinsic equation of a cycloid; viz. the curve is that traced by a point on the circumference of a circle of radius 1⁄4k which rolls on the under side of a horizontal straight line. Since the evolute of a cycloid is an equal cycloid the object is attained by means of two metal cheeks, having the form of the evolute near the cusp, on which the string wraps itself alternately as the pendulum swings. The device has long been abandoned, the difficulty being met in other ways, but the problem, originally investigated by C. Huygens, is important in the history of mathematics.
The component accelerations of a point describing a tortuous curve, in the directions of the tangent, the principal normal, and the binormal, respectively, are found as follows. If OV>, OV′> be vectors representing the velocities at two consecutive points P, P′ of the path, the plane VOV′ is ultimately parallel to the osculating plane of the path at P; the resultant acceleration is therefore in the osculating plane. Also, the projections of VV′> on OV and on a perpendicular to OV in the plane VOV′ are δv and vδε, where δε is the angle between the directions of the tangents at P, P′. Since δε = δs/ρ, where δs = PP′ = vδt and ρ is the radius of principal curvature at P, the component accelerations along the tangent and principal normal are dv/dt and vdε/dt, respectively, or vdv/ds and v2/ρ. For example, if a particle moves on a smooth surface, under no forces except the reaction of the surface, v is constant, and the principal normal to the path will coincide with the normal to the surface. Hence the path is a “geodesic” on the surface.
If we resolve along the tangent to the path (whether plane or tortuous), the equation of motion of a particle may be written
| mv | dv | = T, |
| ds |
where T is the tangential component of the force. Integrating with respect to s we find
1⁄2mv12 − 1⁄2mv02 = ∫s1s0 T ds;
i.e. the increase of kinetic energy between any two positions is equal to the work done by the forces. The result follows also from the Cartesian equations (2); viz. we have
m (ẋẍ + ẏÿ + żz̈) = Xẋ + Yẏ + Zż,
whence, on integration with respect to t,
| 1⁄2m (ẋ2 + ẏ2 + ż2) | = ∫ (Xẋ + Yẏ + Zż) dt + const. |
| = ∫ (X dx + Y dy + Z dz) + const. |
If the axes be rectangular, this has the same interpretation as (24).
Suppose now that we have a constant field of force; i.e. the force acting on the particle is always the same at the same place. The work which must be done by forces extraneous to the field in order to bring the particle from rest in some standard position A to rest in any other position P will not necessarily be the same for all paths between A and P. If it is different for different paths, then by bringing the particle from A to P by one path, and back again from P to A by another, we might secure a gain of work, and the process could be repeated indefinitely. If the work required is the same for all paths between A and P, and therefore zero for a closed circuit, the field is said to be conservative. In this case the work required to bring the particle from rest at A to rest at P is called the potential energy of the particle in the position P; we denote it by V. If PP′ be a linear element δs drawn in any direction from P, and S be the force due to the field, resolved in the direction PP′, we have δV = −Sδs or
| S = − | ∂V | . |
| ∂s |
In particular, by taking PP′ parallel to each of the (rectangular) co-ordinate axes in succession, we find
| X = − | ∂V | , Y = − | ∂V | , Z = − | ∂V | . |
| ∂x | ∂y | ∂z |
The equation (24) or (26) now gives
1⁄2mv12 + V1 = 1⁄2mv02 + V0;
i.e. the sum of the kinetic and potential energies is constant when no work is done by extraneous forces. For example, if the field be that due to gravity we have V = ƒmg dy = mgy + const., if the axis of y be drawn vertically upwards; hence
1⁄2mv2 + mgy = const.
This applies to motion on a smooth curve, as well as to the free motion of a projectile; cf. (7), (14). Again, in the case of a force Kr towards O, where r denotes distance from O we have V = ∫ Kr dr = 1⁄2Kr2 + const., whence
1⁄2mv2 + 1⁄2Kr2 = const.
It has been seen that the orbit is in this case an ellipse; also that if we put μ = K/m the velocity at any point P is v = √μ. OD, where OD is the semi-diameter conjugate to OP. Hence (31) is consistent with the known property of the ellipse that OP2 + OD2 is constant.
The forms assumed by the dynamical equations when the axes of reference are themselves in motion will be considered in § 21. At present we take only the case where the rectangular axes Ox, Oy rotate in their own plane, with angular velocity ω about Oz, which is fixed. In the interval δt the projections of the line joining the origin to any point (x, y, z) on the directions of the co-ordinate axes at time t are changed from x, y, z to (x + δx) cos ω δt − (y + δy) sin ωδt, (x + δx) sin ω δt + (y + δy) cos ω δt, z respectively. Hence the component velocities parallel to the instantaneous positions of the co-ordinate axes at time t are
u = ẋ − ωy, v = ẏ + ωz, ω = ż.
In the same way we find that the component accelerations are
u̇ − ωv, v̇ + ωu, ω̇
Hence if ω be constant the equations of motion take the forms
m (ẍ − 2ωẏ − ω2ẋ) = X, m (ÿ + 2ωẋ − ω2y) = Y, mz̈ = Z.
These become identical with the equations of motion relative to fixed axes provided we introduce a fictitious force mω2r acting outwards from the axis of z, where r = √(x2 + y2), and a second fictitious force 2mωv at right angles to the path, where v is the component of the relative velocity parallel to the plane xy. The former force is called by French writers the force centrifuge ordinaire, and the latter the force centrifuge composée, or force de Coriolis. As an application of (34) we may take the case of a symmetrical Blackburn’s pendulum hanging from a horizontal bar which is made to rotate 980 about a vertical axis half-way between the points of attachment of the upper string. The equations of small motion are then of the type
ẍ − 2ωẏ − ω2x = −p2x, ÿ + 2ωẋ − ω2y = −q2y.
This is satisfied by
ẍ = A cos (σt + ε), y = B sin (σt + ε),
provided
| (σ2 + ω2 − p2) A + 2σωB = 0, |
| 2σωA + (σ2 + ω2 − q2) B = 0. |
Eliminating the ratio A : B we have
(σ2 + ω2 − p2) (σ2 + ω2 − q2) − 4σ2ω2 = 0.
It is easily proved that the roots of this quadratic in σ2 are always real, and that they are moreover both positive unless ω2 lies between p2 and q2. The ratio B/A is determined in each case by either of the equations (37); hence each root of the quadratic gives a solution of the type (36), with two arbitrary constants A, ε. Since the equations (35) are linear, these two solutions are to be superposed. If the quadratic (38) has a negative root, the trigonometrical functions in (36) are to be replaced by real exponentials, and the position x = 0, y = 0 is unstable. This occurs only when the period (2π/ω) of revolution of the arm lies between the two periods (2π/p, 2π/q) of oscillation when the arm is fixed.
§ 14. Central Forces. Hodograph.—The motion of a particle subject to a force which passes always through a fixed point O is necessarily in a plane orbit. For its investigation we require two equations; these may be obtained in a variety of forms.
Since the impulse of the force in any element of time δt has zero moment about O, the same will be true of the additional momentum generated. Hence the moment of the momentum (considered as a localized vector) about O will be constant. In symbols, if v be the velocity and p the perpendicular from O to the tangent to the path,
pv = h,
where h is a constant. If δs be an element of the path, pδs is twice the area enclosed by δs and the radii drawn to its extremities from O. Hence if δA be this area, we have δA = 1⁄2 pδs = 1⁄2 hδt, or
| dA | = 1⁄2h |
| dt |
Hence equal areas are swept over by the radius vector in equal times.
If P be the acceleration towards O, we have
| v | dv | = −P | dr | |
| ds | ds |
since dr/ds is the cosine of the angle between the directions of r and δs. We will suppose that P is a function of r only; then integrating (3) we find
1⁄2v2 = − ∫ P dr + const.,
which is recognized as the equation of energy. Combining this with (1) we have
| h2 | = C − 2 ∫ P dr, |
| p2 |
which completely determines the path except as to its orientation with respect to O.
If the law of attraction be that of the inverse square of the distance, we have P = μ/r2, and
| h2 | = C + | 2μ | . |
| p2 | τ |
Now in a conic whose focus is at O we have
| l | = | 2 | ± | 1 | , |
| p2 | r | a |
where l is half the latus-rectum, a is half the major axis, and the upper or lower sign is to be taken according as the conic is an ellipse or hyperbola. In the intermediate case of the parabola we have a = ∞ and the last term disappears. The equations (6) and (7) are identified by putting
l = h2/μ, a = ± μ/C.
Since
| v2 = | h2 | = μ ( | 2 | ± | 1 | ), |
| p2 | r | a |
it appears that the orbit is an ellipse, parabola or hyperbola, according as v2 is less than, equal to, or greater than 2μ/r. Now it appears from (6) that 2μ/r is the square of the velocity which would be acquired by a particle falling from rest at infinity to the distance r. Hence the character of the orbit depends on whether the velocity at any point is less than, equal to, or greater than the velocity from infinity, as it is called. In an elliptic orbit the area πab is swept over in the time
| r = | πab | = | 2πa3/2 | , |
| 1⁄2h | √μ |
since h = μ1/2l1/2 = μ1/2ba−1/2 by (8).
The converse problem, to determine the law of force under which a given orbit can be described about a given pole, is solved by differentiating (5) with respect to r; thus
| P = | h2 dp | . |
| p3 dr |
In the case of an ellipse described about the centre as pole we have
| a2b2 | = a2 + b2 − r2; |
| p2 |
hence P = μr, if μ = h2/a2b2. This merely shows that a particular ellipse may be described under the law of the direct distance provided the circumstances of projection be suitably adjusted. But since an ellipse can always be constructed with a given centre so as to touch a given line at a given point, and to have a given value of ab (= h/√μ) we infer that the orbit will be elliptic whatever the initial circumstances. Also the period is 2πab/h = 2π/√μ, as previously found.
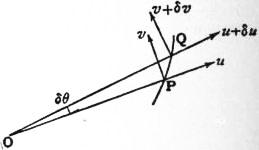 |
| Fig. 68. |
Again, in the equiangular spiral we have p = r sinα, and therefore P = μ/r3, if μ = h2/sin2 α. But since an equiangular spiral having a given pole is completely determined by a given point and a given tangent, this type of orbit is not a general one for the law of the inverse cube. In order that the spiral may be described it is necessary that the velocity of projection should be adjusted to make h = √μ·sinα. Similarly, in the case of a circle with the pole on the circumference we have p2 = r2/2a, P = μ/r5, if μ = 8h2a2; but this orbit is not a general one for the law of the inverse fifth power.
In astronomical and other investigations relating to central forces it is often convenient to use polar co-ordinates with the centre of force as pole. Let P, Q be the positions of a moving point at times t, t + δt, and write OP = r, OQ = r + δr, ∠POQ = δθ, O being any fixed origin. If u, v be the component velocities at P along and perpendicular to OP (in the direction of θ increasing), we have
| u = lim. | δr | = | dr | , v = lim. | r δθ | = r | dθ | . |
| δt | dt | δt | dt |
Again, the velocities parallel and perpendicular to OP change in the time δt from u, v to u − v δθ, v + u δθ, ultimately. The component accelerations at P in these directions are therefore
| du | − v | dθ | = | d2r | − r ( | dθ | )2, |
| dt | dt | dt2 | dt |
| dv | + u | dθ | = | 1 | d | ( r2 | dθ | ), | |
| dt | dt | r | dt | dt |
respectively.
In the case of a central force, with O as pole, the transverse acceleration vanishes, so that
r2 dθ / dt = h,
where h is constant; this shows (again) that the radius vector sweeps over equal areas in equal times. The radial resolution gives
| d2r | − r ( | dθ | )2 = −P, |
| dt2 | dt |
where P, as before, denotes the acceleration towards O. If in this we put r = 1/u, and eliminate t by means of (15), we obtain the general differential equation of central orbits, viz.
| d2u | + u = | P | . |
| dθ2 | h2u2 |
If, for example, the law be that of the inverse square, we have P = μu2, and the solution is of the form
| u = | μ | {1 + e cos (θ − α)}, |
| h2 |
where e, α are arbitrary constants. This is recognized as the polar equation of a conic referred to the focus, the half latus-rectum being h2/μ.
The law of the inverse cube P = μu3 is interesting by way of contrast. The orbits may be divided into two classes according as h2 ≷ μ, i.e. according as the transverse velocity (hu) is greater or less than the velocity √μ·u appropriate to a circular orbit at the same distance. In the former case the equation (17) takes the form
| d2u | + m2u = 0, |
| dθ2 |
the solution of which is
au = sin m (θ − α).
The orbit has therefore two asymptotes, inclined at an angle π/m. In the latter case the differential equation is of the form
| d2u | = m2u, |
| dθ2 |
so that
u = Aemθ + Be−mθ
If A, B have the same sign, this is equivalent to
au = cosh mθ,
if the origin of θ be suitably adjusted; hence r has a maximum value α, and the particle ultimately approaches the pole asymptotically by an infinite number of convolutions. If A, B have opposite signs the form is
au = sinh mθ,
this has an asymptote parallel to θ = 0, but the path near the origin has the same general form as in the case of (23). If A or B vanish we have an equiangular spiral, and the velocity at infinity is zero. In the critical case of h2 = μ, we have d2u/dθ2 = 0, and
u = Aθ + B;
the orbit is therefore a “reciprocal spiral,” except in the special case of A = 0, when it is a circle. It will be seen that unless the conditions be exactly adjusted for a circular orbit the particle will either recede to infinity or approach the pole asymptotically. This problem was investigated by R. Cotes (1682-1716), and the various curves obtained arc known as Coles’s spirals.
A point on a central orbit where the radial velocity (dr/dt) vanishes is called an apse, and the corresponding radius is called an apse-line. If the force is always the same at the same distance any apse-line will divide the orbit symmetrically, as is seen by imagining the velocity at the apse to be reversed. It follows that the angle between successive apse-lines is constant; it is called the apsidal angle of the orbit.
If in a central orbit the velocity is equal to the velocity from infinity, we have, from (5),
| h2 | = 2 ∫∞r P dr; |
| p2 |
this determines the form of the critical orbit, as it is called. If P = μ/rn, its polar equation is
rm cos mθ = am,
where m = 1⁄2(3 − n), except in the case n = 3, when the orbit is an equiangular spiral. The case n = 2 gives the parabola as before.
If we eliminate dθ/dt between (15) and (16) we obtain
| d2r | − | h2 | = −P = −ƒ(r), |
| dt2 | r3 |
say. We may apply this to the investigation of the stability of a circular orbit. Assuming that r = a + x, where x is small, we have, approximately,
| d2x | − | h2 | ( 1 − | 3x | ) = −ƒ(a) − xƒ′(a). |
| dt2 | a3 | a |
Hence if h and a be connected by the relation h2 = a3ƒ(a) proper to a circular orbit, we have
| d2x | + { ƒ′(a) + | 3 | ƒ(a) } x = 0 |
| dt2 | a |
If the coefficient of x be positive the variations of x are simple-harmonic, and x can remain permanently small; the circular orbit is then said to be stable. The condition for this may be written
| d | { a3ƒ(a) } > 0, |
| da |
i.e. the intensity of the force in the region for which r = a, nearly, must diminish with increasing distance less rapidly than according to the law of the inverse cube. Again, the half-period of x is π / √{ƒ′(a) + 3−1ƒ(a)}, and since the angular velocity in the orbit is h/a2, approximately, the apsidal angle is, ultimately,
| π √{ | ƒ(a) | }, |
| aƒ′(a) + 3ƒ(a) |
or, in the case of ƒ(a) = μ/rn, π/√(3 − n). This is in agreement with the known results for n = 2, n = −1.
We have seen that under the law of the inverse square all finite orbits are elliptical. The question presents itself whether there then is any other law of force, giving a finite velocity from infinity, under which all finite orbits are necessarily closed curves. If this is the case, the apsidal angle must evidently be commensurable with π, and since it cannot vary discontinuously the apsidal angle in a nearly circular orbit must be constant. Equating the expression (30) to π/m, we find that ƒ(a) = C/an, where n = 3 − m2. The force must therefore vary as a power of the distance, and n must be less than 3. Moreover, the case n = 2 is the only one in which the critical orbit (27) can be regarded as the limiting form of a closed curve. Hence the only law of force which satisfies the conditions is that of the inverse square.
At the beginning of § 13 the velocity of a moving point P was represented by a vector OV> drawn from a fixed origin O. The locus of the point V is called the hodograph (q.v.); and it appears that the velocity of the point V along the hodograph represents in magnitude and in direction the acceleration in the original orbit. Thus in the case of a plane orbit, if v be the velocity of P, ψ the inclination of the direction of motion to some fixed direction, the polar co-ordinates of V may be taken to be v, ψ; hence the velocities of V along and perpendicular to OV will be dv/dt and v dψ/dt. These expressions therefore give the tangential and normal accelerations of P; cf. § 13 (12).
 |
| Fig. 69. |
In the motion of a projectile under gravity the hodograph is a vertical line described with constant velocity. In elliptic harmonic motion the velocity of P is parallel and proportional to the semi-diameter CD which is conjugate to the radius CP; the hodograph is therefore an ellipse similar to the actual orbit. In the case of a central orbit described under the law of the inverse square we have v = h/SY = h. SZ/b2, where S is the centre of force, SY is the perpendicular to the tangent at P, and Z is the point where YS meets the auxiliary circle again. Hence the hodograph is similar and similarly situated to the locus of Z (the auxiliary circle) turned about S through a right angle. This applies to an elliptic or hyperbolic orbit; the case of the parabolic orbit may be examined separately or treated as a limiting case. The annexed fig. 70 exhibits the various cases, with the hodograph in its proper orientation. The pole O of the hodograph is inside on or outside the circle, according as the orbit is an ellipse, parabola or hyperbola. In any case of a central orbit the hodograph (when turned through a right angle) is similar and similarly situated to the “reciprocal polar” of the orbit with respect to the centre of force. Thus for a circular orbit with the centre of force at an excentric point, the hodograph is a conic with the pole as focus. In the case of a particle oscillating under gravity on a smooth cycloid from rest at the cusp the hodograph is a circle through the pole, described with constant velocity.
§ 15. Kinetics of a System of Discrete Particles.—The momenta of the several particles constitute a system of localized vectors which, for purposes of resolving and taking moments, may be reduced like a system of forces in statics (§ 8). Thus taking any point O as base, we have first a linear momentum whose components referred to rectangular axes through O are
Σ(mẋ), Σ(mẏ), Σ(mż);
its representative vector is the same whatever point O be chosen. Secondly, we have an angular momentum whose components are
Σ {m (yż − zẏ) }, Σ {m (zẋ − xż) }, Σ {m (xẏ − yẋ) },
these being the sums of the moments of the momenta of the several particles about the respective axes. This is subject to the same relations as a couple in statics; it may be represented by a vector which will, however, in general vary with the position of O.
The linear momentum is the same as if the whole mass were concentrated at the centre of mass G, and endowed with the velocity of this point. This follows at once from equation (8) of § 11, if we imagine the two configurations of the system there referred to to be those corresponding to the instants t, t + δt. Thus
| Σ ( m· | PP> | ) = Σ(m)· | GG′> | . |
| δt | δt |
Analytically we have
| Σ(mẋ) = | d | Σ(mx) = Σ(m)· | dx | , |
| dt | dt |
with two similar formulae.
 |
| Fig. 70. |
Again, if the instantaneous position of G be taken as base, the angular momentum of the absolute motion is the same as the angular momentum of the motion relative to G. For the velocity of a particle m at P may be replaced by two components one of which (v) is identical in magnitude and direction with the velocity of G, whilst the other (v) is the velocity relative to G. The aggregate of the components mv of momentum is equivalent to a single localized vector Σ(m)·v in a line through G, and has therefore zero moment about any axis through G; hence in taking moments about such an axis we need only regard the velocities relative to G. In symbols, we have
| Σ { m(yż − zẏ) } = Σ(m)· ( y | dz | − z | dy | ) + Σ { m (ηζ − ζ̇η̇) }. |
| dt | dt |
 |
| Fig. 71. |
since Σ(mξ) = 0, Σ(mξ̇) = 0, and so on, the notation being as in § 11. This expresses that the moment of momentum about any fixed axis (e.g. Ox) is equal to the moment of momentum of the motion relative to G about a parallel axis through G, together with the moment of momentum of the whole mass supposed concentrated at G and moving with this point. If in (5) we make O coincide with the instantaneous position of G, we have x, z, z = 0, and the theorem follows.
Finally, the rates of change of the components of the angular momentum of the motion relative to G referred to G as a moving base, are equal to the rates of change of the corresponding components of angular momentum relative to a fixed base coincident with the instantaneous position of G. For let G′ be a consecutive position of G. At the instant t + δt the momenta of the system are equivalent to a linear momentum represented by a localized vector Σ(m)·(v + δv) in a line through G′ tangential to the path of G′, together with a certain angular momentum. Now the moment of this localized vector with respect to any axis through G is zero, to the first order of δt, since the perpendicular distance of G from the tangent line at G′ is of the order (δt)2. Analytically we have from (5),
| d | Σ { m (yż − zẏ) } = Σ(m)· ( y | dz2 | − z | d2y | ) + | d | Σ { m(ηζ − ζη̇) } |
| dt | dt2 | dt2 | dt |
If we put x, y, z = 0, the theorem is proved as regards axes parallel to Ox.
Next consider the kinetic energy of the system. If from a fixed point O we draw vectors OV1>, OV2> to represent the velocities of the several particles m1, m2 ..., and if we construct the vector
| OK> = | Σ ( m·OV> ) |
| Σ(m) |
this will represent the velocity of the mass-centre, by (3). We find, exactly as in the proof of Lagrange’s First Theorem (§ 11), that
1⁄2Σ (m·OV2) = 1⁄2Σ (m)·OK2 + 1⁄2Σ (m·KV2);
i.e. the total kinetic energy is equal to the kinetic energy of the whole mass supposed concentrated at G and moving with this point, together with the kinetic energy of the motion relative to G. The latter may be called the internal kinetic energy of the system. Analytically we have
| 1⁄2Σ { m (ẋ2 + ẏ2 + ż2) } = 1⁄2Σ(m)· { ( | dx | )2 + ( | dy | )2 + ( | dz | )2 } + 1⁄2Σ{ m(ζ2 + η̇2 + ζ̇2) }. |
| dt | dt | dt |
There is also an analogue to Lagrange’s Second Theorem, viz.
| 1⁄2Σ (m·KV2) = 1⁄2 | ΣΣ (mpmq · VpVq2) | , |
| Σm |
which expresses the internal kinetic energy in terms of the relative velocities of the several pairs of particles. This formula is due to Möbius.
The preceding theorems are purely kinematical. We have now to consider the effect of the forces acting on the particles. These may be divided into two categories; we have first, the extraneous forces exerted on the various particles from without, and, secondly, the mutual or internal forces between the various pairs of particles. It is assumed that these latter are subject to the law of equality of action and reaction. If the equations of motion of each particle be formed separately, each such internal force will appear twice over, with opposite signs for its components, viz. as affecting the motion of each of the two particles between which it acts. The full working out is in general difficult, the comparatively simple problem of “three bodies,” for instance, in gravitational astronomy being still unsolved, but some general theorems can be formulated.
The first of these may be called the Principle of Linear Momentum. If there are no extraneous forces, the resultant linear momentum is constant in every respect. For consider any two particles at P and Q, acting on one another with equal and opposite forces in the line PQ. In the time δt a certain impulse is given to the first particle in the direction (say) from P to Q, whilst an equal and opposite impulse is given to the second in the direction from Q to P. Since these impulses produce equal and opposite momenta in the two particles, the resultant linear momentum of the system is unaltered. If extraneous forces act, it is seen in like manner that the resultant linear momentum of the system is in any given time modified by the geometric addition of the total impulse of the extraneous forces. It follows, by the preceding kinematic theory, that the mass-centre G of the system will move exactly as if the whole mass were concentrated there and were acted on by the extraneous forces applied parallel to their original directions. For example, the mass-centre of a system free from extraneous force will describe a straight line with constant velocity. Again, the mass-centre of a chain of 983 particles connected by strings, projected anyhow under gravity, will describe a parabola.
The second general result is the Principle of Angular Momentum. If there are no extraneous forces, the moment of momentum about any fixed axis is constant. For in time δt the mutual action between two particles at P and Q produces equal and opposite momenta in the line PQ, and these will have equal and opposite moments about the fixed axis. If extraneous forces act, the total angular momentum about any fixed axis is in time δt increased by the total extraneous impulse about that axis. The kinematical relations above explained now lead to the conclusion that in calculating the effect of extraneous forces in an infinitely short time δt we may take moments about an axis passing through the instantaneous position of G exactly as if G were fixed; moreover, the result will be the same whether in this process we employ the true velocities of the particles or merely their velocities relative to G. If there are no extraneous forces, or if the extraneous forces have zero moment about any axis through G, the vector which represents the resultant angular momentum relative to G is constant in every respect. A plane through G perpendicular to this vector has a fixed direction in space, and is called the invariable plane; it may sometimes be conveniently used as a plane of reference.
For example, if we have two particles connected by a string, the invariable plane passes through the string, and if ω be the angular velocity in this plane, the angular momentum relative to G is
m1ω1r1·r1 + m2ωr2·r2 = (m1r12 + m2r22) ω,
where r1, r2 are the distances of m1, m2 from their mass-centre G. Hence if the extraneous forces (e.g. gravity) have zero moment about G, ω will be constant. Again, the tension R of the string is given by
| R = m1ω2r1 = | m1m2 | ω2a, |
| m1 + m2 |
where a = r1 + r2. Also by (10) the internal kinetic energy is
| 1⁄2 | m1m2 | ω2a2 |
| m1 + m2 |
The increase of the kinetic energy of the system in any interval of time will of course be equal to the total work done by all the forces acting on the particles. In many questions relating to systems of discrete particles the internal force Rpq (which we will reckon positive when attractive) between any two particles mp, mq is a function only of the distance rpq between them. In this case the work done by the internal forces will be represented by
−Σ ∫ Rpg drpq,
when the summation includes every pair of particles, and each integral is to be taken between the proper limits. If we write
V = Σ ∫ Rpq drpq,
when rpq ranges from its value in some standard configuration A of the system to its value in any other configuration P, it is plain that V represents the work which would have to be done in order to bring the system from rest in the configuration A to rest in the configuration P. Hence V is a definite function of the configuration P; it is called the internal potential energy. If T denote the kinetic energy, we may say then that the sum T + V is in any interval of time increased by an amount equal to the work done by the extraneous forces. In particular, if there are no extraneous forces T + V is constant. Again, if some of the extraneous forces are due to a conservative field of force, the work which they do may be reckoned as a diminution of the potential energy relative to the field as in § 13.
§ 16. Kinetics of a Rigid Body. Fundamental Principles.—When we pass from the consideration of discrete particles to that of continuous distributions of matter, we require some physical postulate over and above what is contained in the Laws of Motion, in their original formulation. This additional postulate may be introduced under various forms. One plan is to assume that any body whatever may be treated as if it were composed of material particles, i.e. mathematical points endowed with inertia coefficients, separated by finite intervals, and acting on one another with forces in the lines joining them subject to the law of equality of action and reaction. In the case of a rigid body we must suppose that those forces adjust themselves so as to preserve the mutual distances of the various particles unaltered. On this basis we can predicate the principles of linear and angular momentum, as in § 15.
An alternative procedure is to adopt the principle first formally enunciated by J. Le R. d’Alembert and since known by his name. If x, y, z be the rectangular co-ordinates of a mass-element m, the expressions mẍ, mÿ, mz̈ must be equal to the components of the total force on m, these forces being partly extraneous and partly forces exerted on m by other mass-elements of the system. Hence (mẍ, mÿ, mz̈) is called the actual or effective force on m. According to d’Alembert’s formulation, the extraneous forces together with the effective forces reversed fulfil the statical conditions of equilibrium. In other words, the whole assemblage of effective forces is statically equivalent to the extraneous forces. This leads, by the principles of § 8, to the equations
Σ(mẍ) = X, Σ(mÿ) = Y, Σ(mz̈) = Z,
Σ {m (yz̈ − zÿ) } = L, Σ {m (zẍ − xz̈) } = M, Σ{m (xÿ − yẍ) } = N,
where (X, Y, Z) and (L, M, N) are the force—and couple—constituents of the system of extraneous forces, referred to O as base, and the summations extend over all the mass-elements of the system. These equations may be written
| d | Σ(mẋ) = X, | d | Σ(mẏ) = Y, | d | Σ(mż) = Z, |
| dt | dt | dt |
| d | Σ {m (yż − zẏ) } = L, | d | Σ {m (zẋ − xż) } = M, | d | Σ {m (xẏ − yẋ) } = N, |
| dt | dt | dt |
and so express that the rate of change of the linear momentum in any fixed direction (e.g. that of Ox) is equal to the total extraneous force in that direction, and that the rate of change of the angular momentum about any fixed axis is equal to the moment of the extraneous forces about that axis. If we integrate with respect to t between fixed limits, we obtain the principles of linear and angular momentum in the form previously given. Hence, whichever form of postulate we adopt, we are led to the principles of linear and angular momentum, which form in fact the basis of all our subsequent work. It is to be noticed that the preceding statements are not intended to be restricted to rigid bodies; they are assumed to hold for all material systems whatever. The peculiar status of rigid bodies is that the principles in question are in most cases sufficient for the complete determination of the motion, the dynamical equations (1 or 2) being equal in number to the degrees of freedom (six) of a rigid solid, whereas in cases where the freedom is greater we have to invoke the aid of other supplementary physical hypotheses (cf. Elasticity; Hydromechanics).
The increase of the kinetic energy of a rigid body in any interval of time is equal to the work done by the extraneous forces acting on the body. This is an immediate consequence of the fundamental postulate, in either of the forms above stated, since the internal forces do on the whole no work. The statement may be extended to a system of rigid bodies, provided the mutual reactions consist of the stresses in inextensible links, or the pressures between smooth surfaces, or the reactions at rolling contacts (§ 9).
§ 17. Two-dimensional Problems.—In the case of rotation about a fixed axis, the principles take a very simple form. The position of the body is specified by a single co-ordinate, viz. the angle θ through which some plane passing through the axis and fixed in the body has turned from a standard position in space. Then dθ/dt, = ω say, is the angular velocity of the body. The angular momentum of a particle m at a distance r from the axis is mωr·r, and the total angular momentum is Σ(mr2)·ω, or Iω, if I denote the moment of inertia (§ 11) about the axis. Hence if N be the moment of the extraneous forces about the axis, we have
| d | (Iω) = N. |
| dt |
This may be compared with the equation of rectilinear motion of a particle, viz. d/dt·(Mu) = X; it shows that I measures the inertia of the body as regards rotation, just as M measures its inertia as regards translation. If N = 0, ω is constant.
 | |
| Fig. 72. | Fig. 73. |
As a first example, suppose we have a flywheel free to rotate about a horizontal axis, and that a weight m hangs by a vertical string from the circumferences of an axle of radius b (fig. 72). Neglecting frictional resistance we have, if R be the tension of the string,
Iω̇ = Rb, mu̇ = mg − R,
whence
| bω̇ = | mb2 | g. |
| 1 + mb2 |
This gives the acceleration of m as modified by the inertia of the wheel.
A “compound pendulum” is a body of any form which is free to rotate about a fixed horizontal axis, the only extraneous force (other than the pressures of the axis) being that of gravity. If M be the total mass, k the radius of gyration (§ 11) about the axis, we have
| d | ( Mk2 | dθ | ) = −Mgh sin θ, |
| dt | dt |
where θ is the angle which the plane containing the axis and the centre of gravity G makes with the vertical, and h is the distance of G from the axis. This coincides with the equation of motion of a simple pendulum [§ 13 (15)] of length l, provided l = k2/h. The plane of the diagram (fig. 73) is supposed to be a plane through G perpendicular to the axis, which it meets in O. If we produce OG to P, making OP = l, the point P is called the centre of oscillation; the bob of a simple pendulum of length OP suspended from O will keep step with the motion of P, if properly started. If κ be the radius of gyration about a parallel axis through G, we have k2 = κ2 + h2 by § 11 (16), and therefore l = h + κ2/h, whence
GO · GP = κ2.
This shows that if the body were swung from a parallel axis through P the new centre of oscillation would be at O. For different parallel axes, the period of a small oscillation varies as √l, or √(GO + OP); this is least, subject to the condition (4), when GO = GP = κ. The reciprocal relation between the centres of suspension and oscillation is the basis of Kater’s method of determining g experimentally. A pendulum is constructed with two parallel knife-edges as nearly as possible in the same plane with G, the position of one of them being adjustable. If it could be arranged that the period of a small oscillation should be exactly the same about either edge, the two knife-edges would in general occupy the positions of conjugate centres of suspension and oscillation; and the distances between them would be the length l of the equivalent simple pendulum. For if h1 + κ2/h1 = h2 + κ2/h2, then unless h1 = h2, we must have κ2 = h1h2, l = h1 + h2. Exact equality of the two observed periods (τ1, τ2, say) cannot of course be secured in practice, and a modification is necessary. If we write l1 = h1 + κ2/h1, l2 = h2 + κ2/h2, we find, on elimination of κ,
| 1⁄2 | l1 + l2 | + 1⁄2 | l1 − l2 | = 1, |
| h1 + h2 | h1 − h2 |
whence
| 4π2 | = | 1⁄2 (τ12 + τ22) | + | 1⁄2 (τ12 − τ22) | . |
| g | h1 + h2 | h1 − h2 |
The distance h1 + h2, which occurs in the first term on the right hand can be measured directly. For the second term we require the values of h1, h2 separately, but if τ1, τ2 are nearly equal whilst h1, h2 are distinctly unequal this term will be relatively small, so that an approximate knowledge of h1, h2 is sufficient.
As a final example we may note the arrangement, often employed in physical measurements, where a body performs small oscillations about a vertical axis through its mass-centre G, under the influence of a couple whose moment varies as the angle of rotation from the equilibrium position. The equation of motion is of the type
I θ̈ = −Kθ,
and the period is therefore τ = 2π√(I/K). If by the attachment of another body of known moment of inertia I′, the period is altered from τ to τ′, we have τ′ = 2π√{ (I + I′)/K }. We are thus enabled to determine both I and K, viz.
I / I′ = τ2 / (τ′2 − τ2), K = 4π2τ2I / (τ′2 − τ2).
The couple may be due to the earth’s magnetism, or to the torsion of a suspending wire, or to a “bifilar” suspension. In the latter case, the body hangs by two vertical threads of equal length l in a plane through G. The motion being assumed to be small, the tensions of the two strings may be taken to have their statical values Mgb/(a + b), Mga/(a + b), where a, b are the distances of G from the two threads. When the body is twisted through an angle θ the threads make angles aθ/l, bθ/l with the vertical, and the moment of the tensions about the vertical through G is accordingly −Kθ, where K = M gab/l.
For the determination of the motion it has only been necessary to use one of the dynamical equations. The remaining equations serve to determine the reactions of the rotating body on its bearings. Suppose, for example, that there are no extraneous forces. Take rectangular axes, of which Oz coincides with the axis of rotation. The angular velocity being constant, the effective force on a particle m at a distance r from Oz is mω2r towards this axis, and its components are accordingly −ω2mx, −ω2my, O. Since the reactions on the bearings must be statically equivalent to the whole system of effective forces, they will reduce to a force (X Y Z) at O and a couple (L M N) given by
X = −ω2Σ(mx) = −ω2Σ(m)x, Y = −ω2Σ(my) = −ω2Σ(m)y, Z = 0,
L = ω2Σ(myz), M = −ω2Σ(mzx), N = 0,
where x, y refer to the mass-centre G. The reactions do not therefore reduce to a single force at O unless Σ(myz) = 0, Σ(msx) = 0, i.e. unless the axis of rotation be a principal axis of inertia (§ 11) at O. In order that the force may vanish we must also have x, y = 0, i.e. the mass-centre must lie in the axis of rotation. These considerations are important in the “balancing” of machinery. We note further that if a body be free to turn about a fixed point O, there are three mutually perpendicular lines through this point about which it can rotate steadily, without further constraint. The theory of principal or “permanent” axes was first investigated from this point of view by J. A. Segner (1755). The origin of the name “deviation moment” sometimes applied to a product of inertia is also now apparent.
 |
| Fig. 74. |
Proceeding to the general motion of a rigid body in two dimensions we may take as the three co-ordinates of the body the rectangular Cartesian co-ordinates x, y of the mass-centre G and the angle θ through which the body has turned from some standard position. The components of linear momentum are then Mẋ, Mẏ, and the angular momentum relative to G as base is Iθ̇, where M is the mass and I the moment of inertia about G. If the extraneous forces be reduced to a force (X, Y) at G and a couple N, we have
Mẍ = X, Mÿ = Y, Iθ̈ = N.
If the extraneous forces have zero moment about G the angular velocity θ̇ is constant. Thus a circular disk projected under gravity in a vertical plane spins with constant angular velocity, whilst its centre describes a parabola.
We may apply the equations (9) to the case of a solid of revolution rolling with its axis horizontal on a plane of inclination α. If the axis of x be taken parallel to the slope of the plane, with x increasing downwards, we have
Mẍ = Mg sin α − F, 0 = Mg cos α − R, Mκ2θ̈ = Fa,
where κ is the radius of gyration about the axis of symmetry, a is the constant distance of G from the plane, and R, F are the normal and tangential components of the reaction of the plane, as shown in fig. 74. We have also the kinematical relation ẋ = aθ̇. Hence
| ẍ = | a2 | g sin α, R = Mg cos α, F = | κ2 | Mg sin α. |
| κ2 + a2 | κ2 + a2 |
The acceleration of G is therefore less than in the case of frictionless sliding in the ratio a2/(κ2 + a2). For a homogeneous sphere this ratio is 5⁄7, for a uniform circular cylinder or disk 2⁄3, for a circular hoop or a thin cylindrical shell 1⁄2.
The equation of energy for a rigid body has already been stated (in effect) as a corollary from fundamental assumptions. 985 It may also be deduced from the principles of linear and angular momentum as embodied in the equations (9). We have
M (ẋẍ + ẏÿ) + lθ̇θ̈ + Xẋ + Yẏ + Nθ̇,
whence, integrating with respect to t,
1⁄2M (ẋ2 + ẏ2) + 1⁄2Iθ̇2 = ∫ (X dx + Y dy + N dθ) + const.
The left-hand side is the kinetic energy of the whole mass, supposed concentrated at G and moving with this point, together with the kinetic energy of the motion relative to G (§ 15); and the right-hand member represents the integral work done by the extraneous forces in the successive infinitesimal displacements into which the motion may be resolved.
 |
| Fig. 75. |
The formula (13) may be easily verified in the case of the compound pendulum, or of the solid rolling down an incline. As another example, suppose we have a circular cylinder whose mass-centre is at an excentric point, rolling on a horizontal plane. This includes the case of a compound pendulum in which the knife-edge is replaced by a cylindrical pin. If α be the radius of the cylinder, h the distance of G from its axis (O), κ the radius of gyration about a longitudinal axis through G, and θ the inclination of OG to the vertical, the kinetic energy is 1⁄2Mκ2θ̇2 + 1⁄2M·CG2·thetȧ2, by § 3, since the body is turning about the line of contact (C) as instantaneous axis, and the potential energy is −Mgh cos θ. The equation of energy is therefore
1⁄2M (κ2 + α2 + h2 − 2 ah cos θ) θ̇2 − Mgh cos θ − const.
Whenever, as in the preceding examples, a body or a system of bodies, is subject to constraints which leave it virtually only one degree of freedom, the equation of energy is sufficient for the complete determination of the motion. If q be any variable co-ordinate defining the position or (in the case of a system of bodies) the configuration, the velocity of each particle at any instant will be proportional to q̇, and the total kinetic energy may be expressed in the form 1⁄2Aq̇2, where A is in general a function of q [cf. equation (14)]. This coefficient A is called the coefficient of inertia, or the reduced inertia of the system, referred to the co-ordinate q.
 |
| Fig. 76. |
Thus in the case of a railway truck travelling with velocity u the kinetic energy is 1⁄2 (M + mκ2/α2)u2, where M is the total mass, α the radius and κ the radius of gyration of each wheel, and m is the sum of the masses of the wheels; the reduced inertia is therefore M + mκ2/α2. Again, take the system composed of the flywheel, connecting rod, and piston of a steam-engine. We have here a limiting case of three-bar motion (§ 3), and the instantaneous centre J of the connecting-rod PQ will have the position shown in the figure. The velocities of P and Q will be in the ratio of JP to JQ, or OR to OQ; the velocity of the piston is therefore yθ̇, where y = OR. Hence if, for simplicity, we neglect the inertia of the connecting-rod, the kinetic energy will be 1⁄2 (I + My2)thetȧ2, where I is the moment of inertia of the flywheel, and M is the mass of the piston. The effect of the mass of the piston is therefore to increase the apparent moment of inertia of the flywheel by the variable amount My2. If, on the other hand, we take OP (= x) as our variable, the kinetic energy is 1⁄2 (M + I/y2)ẋ2. We may also say, therefore, that the effect of the flywheel is to increase the apparent mass of the piston by the amount I/y2; this becomes infinite at the “dead-points” where the crank is in line with the connecting-rod.
If the system be “conservative,” we have
1⁄2Aq2 + V = const.,
where V is the potential energy. If we differentiate this with respect to t, and divide out by q̇, we obtain
| Aq̈ + 1⁄2 | dA | q̇2 + | dV | = 0 |
| dq | dq |
as the equation of motion of the system with the unknown reactions (if any) eliminated. For equilibrium this must be satisfied by q̇ = O; this requires that dV/dq = 0, i.e. the potential energy must be “stationary.” To examine the effect of a small disturbance from equilibrium we put V = ƒ(q), and write q = q0 + η, where q0 is a root of ƒ′ (q0) = 0 and η is small. Neglecting terms of the second order in η we have dV/dq = ƒ′(q) = ƒ″(q0)·η, and the equation (16) reduces to
Aη̈ + ƒ″ (q0)η = 0,
where A may be supposed to be constant and to have the value corresponding to q = q0. Hence if ƒ″ (q0) > 0, i.e. if V is a minimum in the configuration of equilibrium, the variation of η is simple-harmonic, and the period is 2π √{A/ƒ″(q0) }. This depends only on the constitution of the system, whereas the amplitude and epoch will vary with the initial circumstances. If ƒ″ (q0) < 0, the solution of (17) will involve real exponentials, and η will in general increase until the neglect of the terms of the second order is no longer justified. The configuration q = q0, is then unstable.
As an example of the method, we may take the problem to which equation (14) relates. If we differentiate, and divide by θ, and retain only the terms of the first order in θ, we obtain
{x2 + (h − α)2} θ̈ + ghθ = 0,
as the equation of small oscillations about the position θ = 0. The length of the equivalent simple pendulum is {κ2 + (h − α)2}/h.
The equations which express the change of motion (in two dimensions) due to an instantaneous impulse are of the forms
M (u′ − u) = ξ, M (ν′ − ν) = η, I (ω′ − ω) = ν.
 |
| Fig. 77. |
Here u′, ν′ are the values of the component velocities of G just before, and u, ν their values just after, the impulse, whilst ω′, ω denote the corresponding angular velocities. Further, ξ, η are the time-integrals of the forces parallel to the co-ordinate axes, and ν is the time-integral of their moment about G. Suppose, for example, that a rigid lamina at rest, but free to move, is struck by an instantaneous impulse F in a given line. Evidently G will begin to move parallel to the line of F; let its initial velocity be u′, and let ω′ be the initial angular velocity. Then Mu′ = F, Iω′ = F·GP, where GP is the perpendicular from G to the line of F. If PG be produced to any point C, the initial velocity of the point C of the lamina will be
u′ − ω′·GC = (F/M) · (I − GC·CP/κ2),
where κ2 is the radius of gyration about G. The initial centre of rotation will therefore be at C, provided GC·GP = κ2. If this condition be satisfied there would be no impulsive reaction at C even if this point were fixed. The point P is therefore called the centre of percussion for the axis at C. It will be noted that the relation between C and P is the same as that which connects the centres of suspension and oscillation in the compound pendulum.
§ 18. Equations of Motion in Three Dimensions.—It was proved in § 7 that a body moving about a fixed point O can be brought from its position at time t to its position at time t + δt by an infinitesimal rotation ε about some axis through O; and the limiting position of this axis, when δt is infinitely small, was called the “instantaneous axis.” The limiting value of the ratio ε/δt is called the angular velocity of the body; we denote it by ω. If ξ, η, ζ are the components of ε about rectangular co-ordinate axes through O, the limiting values of ξ/δt, η/δt, ζ/δt are called the component angular velocities; we denote them by p, q, r. If l, m, n be the direction-cosines of the instantaneous axis we have
p = lω, q = mω, r = nω,
p2 + q2 + r2 = ω2.
If we draw a vector OJ to represent the angular velocity, then J traces out a certain curve in the body, called the polhode, and a certain curve in space, called the herpolhode. The cones generated by the instantaneous axis in the body and in space are called the polhode and herpolhode cones, respectively; in the actual motion the former cone rolls on the latter (§ 7).
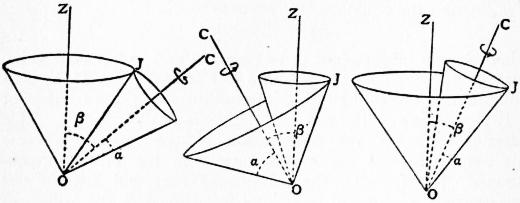 |
| Fig. 78. |
The special case where both cones are right circular and ω is constant is important in astronomy and also in mechanism (theory of bevel wheels). The “precession of the equinoxes” is due to the fact that the earth performs a motion of this kind about its centre, and the whole class of such motions has therefore been termed precessional. In fig. 78, which shows the various cases, OZ is the axis of the fixed and OC that of the rolling cone, and J is the point of contact of the polhode and herpolhode, which are of course both circles. If αbe the semi-angle of the rolling cone, β the constant inclination of OC to OZ, and ψ̇ the angular velocity with which the plane ZOC revolves about OZ, then, considering the velocity of a point in OC at unit distance from O, we have
ω sin α = ±ψ̇ sin β,
where the lower sign belongs to the third case. The earth’s precessional motion is of this latter type, the angles being α = .0087″, β = 23° 28′.
If m be the mass of a particle at P, and PN the perpendicular to the instantaneous axis, the kinetic energy T is given by
2T = Σ {m (ω·PN)2 } = ω2·Σ (m·PN2) = Iω2,
where I is the moment of inertia about the instantaneous axis. With the same notation for moments and products of inertia as in § 11 (38), we have
I = Al2 + Bm2 + Cn2 − 2Fmn − 2Gnl − 2Hlm,
and therefore by (1),
2T = Ap2 + Bq2 + Cr2 − 2Fqr − 2Grp − 2Hpq.
Again, if x, y, z be the co-ordinates of P, the component velocities of m are
qz − ry, rx − pz, py − qx,
by § 7 (5); hence, if λ, μ, ν be now used to denote the component angular momenta about the co-ordinate axes, we have λ = Σ {m (py − qx)y − m(rx − pz) z }, with two similar formulae, or
| λ = Ap −Hq − Gr = | ∂T | , |
| ∂p |
| μ = −Hp + Bq − Fr = | ∂T | , |
| ∂q |
| ν = −Gp − Fq + Cr = | ∂T | . |
| ∂r |
If the co-ordinate axes be taken to coincide with the principal axes of inertia at O, at the instant under consideration, we have the simpler formulae
2T = Ap2 + Bq2 + Cr2,
λ = Ap, μ = Bq, ν = Cr.
It is to be carefully noticed that the axis of resultant angular momentum about O does not in general coincide with the instantaneous axis of rotation. The relation between these axes may be expressed by means of the momental ellipsoid at O. The equation of the latter, referred to its principal axes, being as in § 11 (41), the co-ordinates of the point J where it is met by the instantaneous axis are proportional to p, q, r, and the direction-cosines of the normal at J are therefore proportional to Ap, Bq, Cr, or λ, μ, ν. The axis of resultant angular momentum is therefore normal to the tangent plane at J, and does not coincide with OJ unless the latter be a principal axis. Again, if Γ be the resultant angular momentum, so that
λ2 + μ2 + ν2 = Γ2,
the length of the perpendicular OH on the tangent plane at J is
| OH = | Ap | · | p | ρ + | Bq | · | q | ρ + | Cr | · | r | ρ = | 2T | · | ρ | , |
| Γ | ω | Γ | ω | Γ | ω | Γ | ω |
where ρ = OJ. This relation will be of use to us presently (§ 19).
The motion of a rigid body in the most general case may be specified by means of the component velocities u, v, w of any point O of it which is taken as base, and the component angular velocities p, q, r. The component velocities of any point whose co-ordinates relative to O are x, y, z are then
u + qz − ry, v + rx − pz, w + py − qx
by § 7 (6). It is usually convenient to take as our base-point the mass-centre of the body. In this case the kinetic energy is given by
2T = M0 (u2 + v2 + w2) + Ap2 + Bq2 + Cr2 − 2Fqr − 2Grp − 2Hpg,
where M0 is the mass, and A, B, C, F, G, H are the moments and products of inertia with respect to the mass-centre; cf. § 15 (9).
The components ξ, η, ζ of linear momentum are
| ξ = M0u = | ∂T | , η = M0v = | ∂T | , ζ = M0w = | ∂T | |
| ∂u | ∂v | ∂w |
whilst those of the relative angular momentum are given by (7). The preceding formulae are sufficient for the treatment of instantaneous impulses. Thus if an impulse (ξ, η, ζ, λ, μ, ν) change the motion from (u, v, w, p, q, r) to (u′, v′, w′, p′, q′, r′) we have
| M0 (u′ − u) = ξ, | M0 (v′ − v) = η, | M0(w′ − w) = ζ, |
| A (p′ − p) = λ, | B (q′ − q) = μ, | C (r′ − r) = ν, |
where, for simplicity, the co-ordinate axes are supposed to coincide with the principal axes at the mass-centre. Hence the change of kinetic energy is
T′ − T = ξ · 1⁄2 (u + u′) + η · 1⁄2 (v + v′) + ζ · 1⁄2 (w + w′),
+ λ · 1⁄2 (p + p′) + μ · 1⁄2 (q + q′) + ν · 1⁄2 (r + r′).
The factors of ξ, η, ζ, λ, μ, ν on the right-hand side are proportional to the constituents of a possible infinitesimal displacement of the solid, and the whole expression is proportional (on the same scale) to the work done by the given system of impulsive forces in such a displacement. As in § 9 this must be equal to the total work done in such a displacement by the several forces, whatever they are, which make up the impulse. We are thus led to the following statement: the change of kinetic energy due to any system of impulsive forces is equal to the sum of the products of the several forces into the semi-sum of the initial and final velocities of their respective points of application, resolved in the directions of the forces. Thus in the problem of fig. 77 the kinetic energy generated is 1⁄2M (κ2 + Cq2)ω′2, if C be the instantaneous centre; this is seen to be equal to 1⁄2F·ω′·CP, where ω′·CP represents the initial velocity of P.
The equations of continuous motion of a solid are obtained by substituting the values of ξ, η, ζ, λ, μ, ν from (14) and (7) in the general equations
| dξ | = X, | dη | = Y, | dζ | = Z, |
| dt | dt | dt |
| dλ | = L, | dμ | = M, | dν | = N, |
| dt | dt | dt |
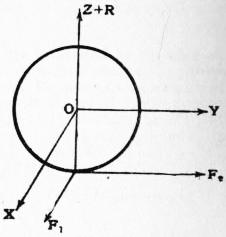 |
| Fig. 79. |
where (X, Y, Z, L, M, N) denotes the system of extraneous forces referred (like the momenta) to the mass-centre as base, the co-ordinate axes being of course fixed in direction. The resulting equations are not as a rule easy of application, owing to the fact that the moments and products of inertia A, B, C, F, G, H are not constants but vary in consequence of the changing orientation of the body with respect to the co-ordinate axes.
An exception occurs, however, in the case of a solid which is kinetically symmetrical (§ 11) about the mass-centre, e.g. a uniform sphere. The equations then take the forms
| M0u̇ = X, | M0v̇ = Y, | M0ẇ = Z, |
| Cṗ = L, | Cq̇ = M, | Cṙ = N, |
where C is the constant moment of inertia about any axis through 987 the mass-centre. Take, for example, the case of a sphere rolling on a plane; and let the axes Ox, Oy be drawn through the centre parallel to the plane, so that the equation of the latter is z = −a. We will suppose that the extraneous forces consist of a known force (X, Y, Z) at the centre, and of the reactions (F1, F2, R) at the point of contact. Hence
M0u̇ = X + F1, M0v̇ = Y + F2, 0 = Z + R,
Cṗ = F2a, Cq̇ = −F1a, Cṙ = 0.
The last equation shows that the angular velocity about the normal to the plane is constant. Again, since the point of the sphere which is in contact with the plane is instantaneously at rest, we have the geometrical relations
u + qa = 0, v + pa = 0, w = 0,
by (12). Eliminating p, q, we get
(M0 + Ca−2) u̇ = X, (M0 + Ca−2) v̇ = Y.
The acceleration of the centre is therefore the same as if the plane were smooth and the mass of the sphere were increased by C/α2. Thus the centre of a sphere rolling under gravity on a plane of inclination a describes a parabola with an acceleration
g sin α/(1 + C/Ma2)
parallel to the lines of greatest slope.
Take next the case of a sphere rolling on a fixed spherical surface. Let a be the radius of the rolling sphere, c that of the spherical surface which is the locus of its centre, and let x, y, z be the co-ordinates of this centre relative to axes through O, the centre of the fixed sphere. If the only extraneous forces are the reactions (P, Q, R) at the point of contact, we have
M0ẍ = P, M0ÿ = Q, M0z̈ = R,
| Cṗ = − | a | (yR − zQ), Cq̇ = − | a | (zP − xR), Cṙ = − | a | (xQ − yP), |
| c | c | c |
the standard case being that where the rolling sphere is outside the fixed surface. The opposite case is obtained by reversing the sign of a. We have also the geometrical relations
ẋ = (a/c) (qz − ry), ẏ = (a/c) (rx − pz), ż = (a/c) (py − gx),
If we eliminate P, Q, R from (22), the resulting equations are integrable with respect to t; thus
| p = − | M0a | (yż − zẏ) + α, q = − | M0a | (zẋ − xż) + β, r = − | M0a | (xẏ − yẋ) + γ, |
| Cc | Cc | Cc |
where α, β, γ are arbitrary constants. Substituting in (23) we find
| ( 1 + | M0a2 | ) ẋ = | a | (βz − γy), ( 1 + | M0a2 | ) ẏ = | a | (γx − αz), ( 1 + | M0a2 | ) ż = | a | (αy − βx). |
| C | c | C | c | C | c |
Hence αẋ + βẏ + γż = 0, or
αx + βy + γz = const.;
which shows that the centre of the rolling sphere describes a circle. If the axis of z be taken normal to the plane of this circle we have α = 0, β = 0, and
| ( 1 + | M0a2 | ) ẋ = −γ | a | y, ( 1 + | M0a2 | ) ẏ = γ | a | x. |
| C | c | C | c |
The solution of these equations is of the type
x = b cos (στ + ε), y = b sin (σt + ε),
where b, ε are arbitrary, and
| σ = | γa/c | . |
| 1 + M0a2/C |
The circle is described with the constant angular velocity σ.
When the gravity of the rolling sphere is to be taken into account the preceding method is not in general convenient, unless the whole motion of G is small. As an example of this latter type, suppose that a sphere is placed on the highest point of a fixed sphere and set spinning about the vertical diameter with the angular velocity n; it will appear that under a certain condition the motion of G consequent on a slight disturbance will be oscillatory. If Oz be drawn vertically upwards, then in the beginning of the disturbed motion the quantities x, y, p, q, P, Q will all be small. Hence, omitting terms of the second order, we find
M0ẍ = P, M0ẏ = Q, R = M0g,
Cṗ = −(M0ga/c) y + aQ, Cq̇ = (M0ga/c) x − aP, Cṙ = 0.
The last equation shows that the component r of the angular velocity retains (to the first order) the constant value n. The geometrical relations reduce to
ẋ = aq − (na/c) y, ẏ = −ap + (na/c) x.
Eliminating p, g, P, Q, we obtain the equations
(C + M0a2) ẍ + (Cna/c) y − (M0ga2/c) x = 0,
(C + M0a2) ÿ − (Cna/c) x − (M0ga2/c) y = 0,
which are both contained in
| { (C + M0a2) | d2 | − i | Cna | d | − | M0ga2 | } (x + iy) = 0. | |
| dt2 | c | dt | c |
This has two solutions of the type x + iy = αei(σt + ε), where α, ε are arbitrary, and σ is a root of the quadratic
(C + M0a2) σ2 − (Cna/c) σ + M0ga2/c = 0.
If
n2 > (4Mgc/C) (1 + M0a2/C),
both roots are real, and have the same sign as n. The motion of G then consists of two superposed circular vibrations of the type
x = α cos (σt + ε), y = α sin (σt + ε),
in each of which the direction of revolution is the same as that of the initial spin of the sphere. It follows therefore that the original position is stable provided the spin n exceed the limit defined by (35). The case of a sphere spinning about a vertical axis at the lowest point of a spherical bowl is obtained by reversing the signs of α and c. It appears that this position is always stable.
It is to be remarked, however, that in the first form of the problem the stability above investigated is practically of a limited or temporary kind. The slightest frictional forces—such as the resistance of the air—even if they act in lines through the centre of the rolling sphere, and so do not directly affect its angular momentum, will cause the centre gradually to descend in an ever-widening spiral path.
§ 19. Free Motion of a Solid.—Before proceeding to further problems of motion under extraneous forces it is convenient to investigate the free motion of a solid relative to its mass-centre O, in the most general case. This is the same as the motion about a fixed point under the action of extraneous forces which have zero moment about that point. The question was first discussed by Euler (1750); the geometrical representation to be given is due to Poinsot (1851).
The kinetic energy T of the motion relative to O will be constant. Now T = 1⁄2Iω2, where ω is the angular velocity and I is the moment of inertia about the instantaneous axis. If ρ be the radius-vector OJ of the momental ellipsoid
Ax2 + By2 + Cz2 = Mε4
drawn in the direction of the instantaneous axis, we have I = Mε4/ρ2 (§ 11); hence ω varies as ρ. The locus of J may therefore be taken as the “polhode” (§ 18). Again, the vector which represents the angular momentum with respect to O will be constant in every respect. We have seen (§ 18) that this vector coincides in direction with the perpendicular OH to the tangent plane of the momental ellipsoid at J; also that
| OH = | 2T | · | ρ | , |
| Γ | ω |
where Γ is the resultant angular momentum about O. Since ω varies as ρ, it follows that OH is constant, and the tangent plane at J is therefore fixed in space. The motion of the body relative to O is therefore completely represented if we imagine the momental ellipsoid at O to roll without sliding on a plane fixed in space, with an angular velocity proportional at each instant to the radius-vector of the point of contact. The fixed plane is parallel to the invariable plane at O, and the line OH is called the invariable line. The trace of the point of contact J on the fixed plane is the “herpolhode.”
If p, q, r be the component angular velocities about the principal axes at O, we have
(A2p2 + B2q2 + C2r2) / Γ2 = (Ap2 + Bq2 + Cr2) / 2T,
each side being in fact equal to unity. At a point on the polhode cone x : y : z = p : q : r, and the equation of this cone is therefore
| A2 ( 1 − | Γ2 | ) x2 + B2 ( 1 − | Γ2 | ) y2 + C2 ( 1 − | Γ2 | ) z2 = 0. |
| 2AT | 2BT | 2CT |
Since 2AT − Γ2 = B (A − B)q2 + C(A − C)r2, it appears that if A > B > C the coefficient of x2 in (4) is positive, that of z2 is negative, whilst that of y2 is positive or negative according as 2BT ≷ Γ2. Hence the polhode cone surrounds the axis of greatest or least moment according as 2BT ≷ Γ2. In the critical case of 2BT = Γ2 it breaks up into two planes through the axis of mean moment (Oy). The herpolhode curve in the fixed plane is obviously confined between two concentric circles which it alternately touches; it is not in general a re-entrant curve. It has been shown by De Sparre that, owing to the limitation imposed on the possible forms of the momental ellipsoid by the relation B + C > A, the curve has no points of inflexion. The invariable line OH describes another cone in the 988 body, called the invariable cone. At any point of this we have x : y : z = Ap · Bq : Cr, and the equation is therefore
| ( 1 − | Γ2 | ) x2 + ( 1 − | Γ2 | ) y2 + ( 1 − | Γ2 | ) z2 = 0. |
| 2AT | 2BT | 2CT |
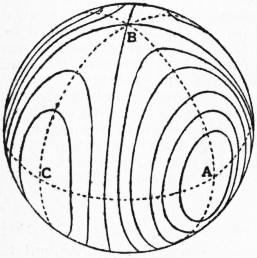 |
| Fig. 80. |
The signs of the coefficients follow the same rule as in the case of (4). The possible forms of the invariable cone are indicated in fig. 80 by means of the intersections with a concentric spherical surface. In the critical case of 2BT = Γ2 the cone degenerates into two planes. It appears that if the body be sightly disturbed from a state of rotation about the principal axis of greatest or least moment, the invariable cone will closely surround this axis, which will therefore never deviate far from the invariable line. If, on the other hand, the body be slightly disturbed from a state of rotation about the mean axis a wide deviation will take place. Hence a rotation about the axis of greatest or least moment is reckoned as stable, a rotation about the mean axis as unstable. The question is greatly simplified when two of the principal moments are equal, say A = B. The polhode and herpolhode cones are then right circular, and the motion is “precessional” according to the definition of § 18. If α be the inclination of the instantaneous axis to the axis of symmetry, β the inclination of the latter axis to the invariable line, we have
Γ cos β = C ω cos α, Γ sin β = A ω sin α,
whence
| tan β | A | tan α. |
| C |
 |
| Fig. 81. |
Hence β ≷ α, and the circumstances are therefore those of the first or second case in fig. 78, according as A ≷ C. If ψ be the rate at which the plane HOJ revolves about OH, we have
| ψ = | sin α | ω = | C cos α | ω, |
| sin β | A cos β |
by § 18 (3). Also if χ̇ be the rate at which J describes the polhode, we have ψ̇ sin (β − α) = χ̇ sin β, whence
| χ̇ = | sin (α − β) | ω. |
| sin α |
If the instantaneous axis only deviate slightly from the axis of symmetry the angles α, β are small, and χ̇ = (A − C) A·ω; the instantaneous axis therefore completes its revolution in the body in the period
| 2π | = | A − C | ω. |
| χ̇ | A |
In the case of the earth it is inferred from the independent phenomenon of luni-solar precession that (C − A)/A = .00313. Hence if the earth’s axis of rotation deviates slightly from the axis of figure, it should describe a cone about the latter in 320 sidereal days. This would cause a periodic variation in the latitude of any place on the earth’s surface, as determined by astronomical methods. There appears to be evidence of a slight periodic variation of latitude, but the period would seem to be about fourteen months. The discrepancy is attributed to a defect of rigidity in the earth. The phenomenon is known as the Eulerian nutation, since it is supposed to come under the free rotations first discussed by Euler.
§ 20. Motion of a Solid of Revolution.—In the case of a solid of revolution, or (more generally) whenever there is kinetic symmetry about an axis through the mass-centre, or through a fixed point O, a number of interesting problems can be treated almost directly from first principles. It frequently happens that the extraneous forces have zero moment about the axis of symmetry, as e.g. in the case of the flywheel of a gyroscope if we neglect the friction at the bearings. The angular velocity (r) about this axis is then constant. For we have seen that r is constant when there are no extraneous forces; and r is evidently not affected by an instantaneous impulse which leaves the angular momentum Cr, about the axis of symmetry, unaltered. And a continuous force may be regarded as the limit of a succession of infinitesimal instantaneous impulses.
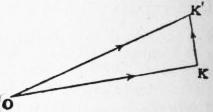 |
| Fig. 82. |
Suppose, for example, that a flywheel is rotating with angular velocity n about its axis, which is (say) horizontal, and that this axis is made to rotate with the angular velocity ψ̇ in the horizontal plane. The components of angular momentum about the axis of the flywheel and about the vertical will be Cn and A ψ̇ respectively, where A is the moment of inertia about any axis through the mass-centre (or through the fixed point O) perpendicular to that of symmetry. If OK> be the vector representing the former component at time t, the vector which represents it at time t + δt will be OK′>, equal to OK> in magnitude and making with it an angle δψ. Hence KK′> (= Cn δψ) will represent the change in this component due to the extraneous forces. Hence, so far as this component is concerned, the extraneous forces must supply a couple of moment Cnψ̇ in a vertical plane through the axis of the flywheel. If this couple be absent, the axis will be tilted out of the horizontal plane in such a sense that the direction of the spin n approximates to that of the azimuthal rotation ψ̇. The remaining constituent of the extraneous forces is a couple Aψ̈ about the vertical; this vanishes if ψ̇ is constant. If the axis of the flywheel make an angle θ with the vertical, it is seen in like manner that the required couple in the vertical plane through the axis is Cn sin θ ψ̇. This matter can be strikingly illustrated with an ordinary gyroscope, e.g. by making the larger movable ring in fig. 37 rotate about its vertical diameter.
 |
| Fig. 83. |
If the direction of the axis of kinetic symmetry be specified by means of the angular co-ordinates θ, ψ of § 7, then considering the component velocities of the point C in fig. 83, which are θ̇ and sin θψ̇ along and perpendicular to the meridian ZC, we see that the component angular velocities about the lines OA′, OB′ are −sin θ ψ̇ and θ̇ respectively. Hence if the principal moments of inertia at O be A, A, C, and if n be the constant angular velocity about the axis OC, the kinetic energy is given by
2T = A (θ̇2 + sin2 θψ̇2) + Cn2.
Again, the components of angular momentum about OC, OA′ are Cn, −A sin θ ψ̇, and therefore the angular momentum (μ, say) about OZ is
μ = A sin2 θψ̇ + Cn cos θ.
We can hence deduce the condition of steady precessional motion in a top. A solid of revolution is supposed to be free to turn about a fixed point O on its axis of symmetry, its mass-centre G being in this axis at a distance h from O. In fig. 83 OZ is supposed to be vertical, and OC is the axis of the solid drawn in the direction OG. If θ is constant the points C, A′ will in time δt come to positions C″, A″ such that CC″ = sin θ δψ, A′A″ = cos θ δψ, and the angular momentum about OB′ will become Cn sin θ δψ − A sin θ ψ̇ · cos θ δψ. Equating this to Mgh sin θ δt, and dividing out by sin θ, we obtain
A cos θ ψ̇2 − Cnψ̇ + Mgh = 0,
as the condition in question. For given values of n and θ we have two possible values of ψ̇ provided n exceed a certain limit. With a very rapid spin, or (more precisely) with Cn large in comparison with √(4AMgh cos θ), one value of ψ̇ is small and the other large, viz. the two values are Mgh/Cn and Cn/A cos θ approximately. The absence of g from the latter expression indicates that the circumstances of the rapid precession are very 989 nearly those of a free Eulerian rotation (§ 19), gravity playing only a subordinate part.
 |
| Fig. 84. |
Again, take the case of a circular disk rolling in steady motion on a horizontal plane. The centre O of the disk is supposed to describe a horizontal circle of radius c with the constant angular velocity ψ̇, whilst its plane preserves a constant inclination θ to the horizontal. The components of the reaction of the horizontal lane will be Mcψ̇2 at right angles to the tangent line at the point of contact and Mg vertically upwards, and the moment of these about the horizontal diameter of the disk, which corresponds to OB′ in fig. 83, is Mcψ̇2. α sin θ − Mgα cos θ, where α is the radius of the disk. Equating this to the rate of increase of the angular momentum about OB′, investigated as above, we find
| ( C + Ma2 + A | a | cos θ ) ψ̇2 = Mg | a2 | cot θ, |
| c | c |
where use has been made of the obvious relation nα = cψ̇. If c and θ be given this formula determines the value of ψ̇ for which the motion will be steady.
In the case of the top, the equation of energy and the condition of constant angular momentum (μ) about the vertical OZ are sufficient to determine the motion of the axis. Thus, we have
1⁄2A (θ̇2 + sin2 θψ̇2) + 1⁄2Cn2 + Mgh cos θ = const.,
A sin2 θψ̇ + ν cos θ = μ,
where ν is written for Cn. From these ψ̇ may be eliminated, and on differentiating the resulting equation with respect to t we obtain
| Aθ̈ − | (μ − ν cos θ) (μ cos θ − ν) | − Mgh sin θ = 0. |
| A sin3 θ |
If we put θ̈ = 0 we get the condition of steady precessional motion in a form equivalent to (3). To find the small oscillation about a state of steady precession in which the axis makes a constant angle α with the vertical, we write θ = α + χ, and neglect terms of the second order in χ. The result is of the form
χ̈ + σ2χ = 0,
where
σ2 = { (μ − ν cos α)2 + 2 (μ − ν cos α) (μ cos α − ν) cos α +
(μ cos α − ν)2 } / A2 sin4 α.
When ν is large we have, for the “slow” precession σ = ν/A, and for the “rapid” precession σ = A/ν cos α = ψ̇, approximately. Further, on examining the small variation in ψ̇, it appears that in a slightly disturbed slow precession the motion of any point of the axis consists of a rapid circular vibration superposed on the steady precession, so that the resultant path has a trochoidal character. This is a type of motion commonly observed in a top spun in the ordinary way, although the successive undulations of the trochoid may be too small to be easily observed. In a slightly disturbed rapid precession the superposed vibration is elliptic-harmonic, with a period equal to that of the precession itself. The ratio of the axes of the ellipse is sec α, the longer axis being in the plane of θ. The result is that the axis of the top describes a circular cone about a fixed line making a small angle with the vertical. This is, in fact, the “invariable line” of the free Eulerian rotation with which (as already remarked) we are here virtually concerned. For the more general discussion of the motion of a top see Gyroscope.
§ 21. Moving Axes of Reference.—For the more general treatment of the kinetics of a rigid body it is usually convenient to adopt a system of moving axes. In order that the moments and products of inertia with respect to these axes may be constant, it is in general necessary to suppose them fixed in the solid.
We will assume for the present that the origin O is fixed. The moving axes Ox, Oy, Oz form a rigid frame of reference whose motion at time t may be specified by the three component angular velocities p, q, r. The components of angular momentum about Ox, Oy, Oz will be denoted as usual by λ, μ, ν. Now consider a system of fixed axes Ox′, Oy′, Oz′ chosen so as to coincide at the instant t with the moving system Ox, Oy, Oz. At the instant t + δt, Ox, Oy, Oz will no longer coincide with Ox′, Oy′, Oz′; in particular they will make with Ox′ angles whose cosines are, to the first order, 1, −rδt, qδt, respectively. Hence the altered angular momentum about Ox′ will be λ + δλ + (μ + δμ) (−rδt) + (ν + δν) qδt. If L, M, N be the moments of the extraneous forces about Ox, Oy, Oz this must be equal to λ + Lδt. Hence, and by symmetry, we obtain
| dλ | − rν + qν = L, |
| dt |
| dμ | − pν + rλ = M, |
| dt |
| dν | − qλ + pν = N. |
| dt |
These equations are applicable to any dynamical system whatever. If we now apply them to the case of a rigid body moving about a fixed point O, and make Ox, Oy, Oz coincide with the principal axes of inertia at O, we have λ, μ, ν = Ap, Bq, Cr, whence
| A | dp | − (B − C) qr = L, |
| dt |
| B | dq | − (C − A) rp = M, |
| C | dr | − (A − B) pq = N. |
| dt |
If we multiply these by p, q, r and add, we get
| d | · 1⁄2 (Ap2 + Bq2 + Cr2) = Lp + Mq + Nr, |
| dt |
which is (virtually) the equation of energy.
As a first application of the equations (2) take the case of a solid constrained to rotate with constant angular velocity ω about a fixed axis (l, m, n). Since p, q, r are then constant, the requisite constraining couple is
L = (C − B) mnω2, M = (A − C) nlω2, N = (B − A) lmω2.
If we reverse the signs, we get the “centrifugal couple” exerted by the solid on its bearings. This couple vanishes when the axis of rotation is a principal axis at O, and in no other case (cf. § 17).
If in (2) we put, L, M, N = O we get the case of free rotation; thus
| A | dp | (B − C) qr, |
| dt |
| B | dq | (C − A) rp, |
| dt |
| C | dr | (A − B) pq. |
| dt |
These equations are due to Euler, with whom the conception of moving axes, and the application to the problem of free rotation, originated. If we multiply them by p, q, r, respectively, or again by Ap, Bq, Cr respectively, and add, we verify that the expressions Ap2 + Bq2 + Cr2 and A2p2 + B2q2 + C2r2 are both constant. The former is, in fact, equal to 2T, and the latter to Γ2, where T is the kinetic energy and Γ the resultant angular momentum.
To complete the solution of (2) a third integral is required; this involves in general the use of elliptic functions. The problem has been the subject of numerous memoirs; we will here notice only the form of solution given by Rueb (1834), and at a later period by G. Kirchhoff (1875), If we write
| u = ∫φ0 | dφ | , Δφ = √(1 − k2 sin2 φ), |
| Δφ |
we have, in the notation of elliptic functions, φ = am u. If we assume
p = p0 cos am (σt + ε), q = q0sin am (σt + ε), r = r0Δ am (σt + ε),
we find
| ṗ = − | σp0 | qr, q̇ = | σq0 | rp, ṙ = | k2σr0 | pq. |
| q0r0 | r0p0 | p0q0 |
Hence (5) will be satisfied, provided
| −σp0 | = | B − C | , | σq0 | = | C − A | , | −k2σr0 | = | A − B | . |
| q0r0 | A | r0p0 | B | p0q0 | C |
These equations, together with the arbitrary initial values of p, q, r, determine the six constants which we have denoted by p0, q0, r0, k2, σ, ε. We will suppose that A > B > C. From the form of the polhode curves referred to in § 19 it appears that the angular velocity q about the axis of mean moment must vanish periodically. If we adopt one of these epochs as the origin of t, we have ε = 0, and p0, r0 will become identical with the initial values of p, r. The conditions (9) then lead to
| q02 = | A (A − C) | p02, σ2 = | (A − C) (B − C) | r02, k2 = | A (A − B) | · | p02 | . |
| B (B − C) | AB | C (B − C) | r02 |
For a real solution we must have k2 < 1, which is equivalent to 2BT > Γ2. If the initial conditions are such as to make 2BT < Γ2, we must interchange the forms of p and r in (7). In the present case the instantaneous axis returns to its initial position in the body whenever φ increases by 2π, i.e. whenever t increases by 4K/σ, when K is the “complete” elliptic integral of the first kind with respect to the modulus k.
The elliptic functions degenerate into simpler forms when k2 = 0 or k2 = 1. The former case arises when two of the principal moments are equal; this has been sufficiently dealt with in § 19. If k2 = 1, we must have 2BT = Γ2. We have seen that the alternative 2BT ≷ Γ2 determines whether the polhode cone surrounds the principal axis of least or greatest moment. The case of 2BT = Γ2, exactly, is therefore a critical case; it may be shown that the instantaneous axis either coincides permanently with the axis of mean moment or approaches it asymptotically.
When the origin of the moving axes is also in motion with a velocity whose components are u, v, w, the dynamical equations are
| dξ | − rη + qζ = X, | dη | − pζ + rχ = Y, | dζ | − qχ + pη = Z, |
| dt | dt | dt |
| dλ | − rμ + qν − wη + vζ = L, | dμ | − pν + rλ- uζ + wξ = M, |
| dt | dt |
| dν | − qλ + pμ − vξ + uη = N. |
| dt |
To prove these, we may take fixed axes O′x′, O′y′, O′z′ coincident with the moving axes at time t, and compare the linear and angular momenta ξ + δξ, η + δη, ζ + δζ, λ + δλ, μ + δμ, ν + δν relative to the new position of the axes, Ox, Oy, Oz at time t + δt with the original momenta ξ, η, ζ, λ, μ, ν relative to O′x′, O′y′, O′z′ at time t. As in the case of (2), the equations are applicable to any dynamical system whatever. If the moving origin coincide always with the mass-centre, we have ξ, η, ζ = M0u, M0v, M0w, where M0 is the total mass, and the equations simplify.
When, in any problem, the values of u, v, w, p, q, r have been determined as functions of t, it still remains to connect the moving axes with some fixed frame of reference. It will be sufficient to take the case of motion about a fixed point O; the angular co-ordinates θ, φ, ψ of Euler may then be used for the purpose. Referring to fig. 36 we see that the angular velocities p, q, r of the moving lines, OA, OB, OC about their instantaneous positions are
p = θ̇ sin φ − sin θ cos φψ̇,
q = θ̇ cos φ + sin θ sin φψ̇,
r = φ̇ + cos θψ̇,
by § 7 (3), (4). If OA, OB, OC be principal axes of inertia of a solid, and if A, B, C denote the corresponding moments of inertia, the kinetic energy is given by
2T = A (θ̇ sin φ − sin θ cos φψ̇)2
+ B (θ̇ cos φ + sin θ sin θψ)2
+ C (φ̇ + cos θψ̇)2.
If A = B this reduces to
2T = A (θ̇2 + sin2 θ ψ̇2) + C (φ̇ + cos θ ψ̇)2;
cf. § 20 (1).
§ 22. Equations of Motion in Generalized Co-ordinates.—Suppose we have a dynamical system composed of a finite number of material particles or rigid bodies, whether free or constrained in any way, which are subject to mutual forces and also to the action of any given extraneous forces. The configuration of such a system can be completely specified by means of a certain number (n) of independent quantities, called the generalized co-ordinates of the system. These co-ordinates may be chosen in an endless variety of ways, but their number is determinate, and expresses the number of degrees of freedom of the system. We denote these co-ordinates by q1, q2, ... qn. It is implied in the above description of the system that the Cartesian co-ordinates x, y, z of any particle of the system are known functions of the q’s, varying in form (of course) from particle to particle. Hence the kinetic energy T is given by
| 2T = Σ {m (ẋ2 + ẏ2 + ż2) } |
| = a11q̇12 + a22q̇22 + ... + 2a12q̇1q̇2 + ..., |
where
| arr = Σ [ m { ( | ∂x | )2 + ( | ∂y | )2 + ( | ∂z | )2 } ], |
| ∂qr | ∂qr | ∂qr |
| ars = Σ { m ( | ∂x | ∂x | + | ∂y | ∂y | + | ∂z | ∂z | ) } = asr. | |||
| ∂qr | ∂qs | ∂qr | ∂qs | ∂qr | ∂qs |
Thus T is expressed as a homogeneous quadratic function of the quantities q̇1, q̇2, ... q̇n, which are called the generalized components of velocity. The coefficients arr, ars are called the coefficients of inertia; they are not in general constants, being functions of the q’s and so variable with the configuration. Again, If (X, Y, Z) be the force on m, the work done in an infinitesimal change of configuration is
Σ (Xδx + Yδy + Zδz) = Q1δq1 + Q2δq2 + ... + Qnδqn,
where
| Qr = Σ ( X | ∂x | + Y | ∂y | + Z | ∂z | ). |
| ∂qr | ∂qr | ∂qr |
The quantities Qr are called the generalized components of force.
The equations of motion of m being
mẍ = X, mÿ = Y, mz̈ = Z,
we have
| Σ { m ( ẍ | ∂x | + ÿ | ∂y | + z̈ | ∂z | ) } = Qr. |
| ∂qr | ∂qr | ∂qr |
Now
| ẋ = | ∂x | q̇1 + | ∂x | q̇2 + ... + | ∂x | q̇n, |
| ∂q1 | ∂q2 | ∂qn |
whence
| ∂ẋ | = | ∂x | . |
| ∂q̇r | ∂qr |
Also
| d | ( | ∂x | ) = | ∂2x | q̇1 + | ∂2x | q̇2 + ... + | ∂2x | q̇r = | ∂ẋ | . |
| dt | ∂qr | ∂q1∂qr | ∂q2∂qr | ∂qn∂qr | ∂qr |
Hence
| ẍ | ∂x | = | d | ( ẋ | ∂x | ) − ẋ | d | ( | ∂x | ) = | d | ( ẋ | ∂ẋ | ) − ẋ | ∂ẋ | . |
| ∂qr | dt | ∂qr | dt | ∂qr | dt | ∂q̇r | ∂qr |
By these and the similar transformations relating to y and z the equation (6) takes the form
| d | ( | ∂T | ) − | ∂T | = Qr. |
| dt | ∂q̇r | ∂qr |
If we put r = 1, 2, ... n in succession, we get the n independent equations of motion of the system. These equations are due to Lagrange, with whom indeed the first conception, as well as the establishment, of a general dynamical method applicable to all systems whatever appears to have originated. The above proof was given by Sir W. R. Hamilton (1835). Lagrange’s own proof will be found under Dynamics, § Analytical. In a conservative system free from extraneous force we have
Σ (X δx + Y δy + Z δz) = −δV,
where V is the potential energy. Hence
| Qr = − | ∂V | , |
| ∂qr |
and
| d | ( | ∂T | ) − | ∂T | = − | ∂V | . |
| dt | ∂q̇r | ∂qr | ∂qr |
If we imagine any given state of motion (q̇1, q̇2 ... q̇n) through the configuration (q1, q2, ... qn) to be generated instantaneously from rest by the action of suitable impulsive forces, we find on integrating (11) with respect to t over the infinitely short duration of the impulse
| ∂T | = Qr′, |
| ∂q̇r |
where Qr′ is the time integral of Qr and so represents a generalized component of impulse. By an obvious analogy, the expressions ∂T/∂q̇r may be called the generalized components of momentum; they are usually denoted by pr thus
pr = ∂T / ∂q̇r = a1rq̇1 + a2rq̇2 + ... + anrq̇n.
Since T is a homogeneous quadratic function of the velocities q̇1, q̇2, ... q̇n, we have
| 2T = | ∂T | q̇1 + | ∂T | q̇2 + ... + | ∂T | q̇n = p1q̇2 + p2q̇2 + ... + pnq̇n. |
| ∂q̇1 | ∂q̇2 | ∂q̇n |
Hence
| 2 | dT | = ṗ1q̇1 + ṗ2q̇2 + ... + ṗnq̇n + ṗ1q̈1 + ṗ2q̈2 + ... + ṗnq̈n |
| dt |
| = ( | ∂T | + Q1 ) q̇1 + ( | ∂T | + Q2 ) q̇2 + ... + ( | ∂T | + Qn ) q̇n + | ∂T | q̈1 + | ∂T | q̈2 + ... + | ∂T | q̈n |
| ∂q̇1 | ∂q̇2 | ∂q̇n | ∂q̇1 | ∂q̇2 | ∂q̇n |
| = | dT | + Q1q̇1 + Q2q̇2 + ... + Qnq̇n, |
| dt |
or
| dT | = Q1q̇1 + Q2q̇2 + ... + Qnq̇n. |
| dt |
This equation expresses that the kinetic energy is increasing at a rate equal to that at which work is being done by the forces. In the case of a conservative system free from extraneous force it becomes the equation of energy
| d | (T + V) = 0, or T + V = const., |
| dt |
in virtue of (13).
As a first application of Lagrange’s formula (11) we may form the equations of motion of a particle in spherical polar co-ordinates. Let r be the distance of a point P from a fixed origin O, θ the angle which OP makes with a fixed direction OZ, ψ the azimuth of the plane ZOP relative to some fixed plane through OZ. The displacements of P due to small variations of these co-ordinates are ∂r along OP, r δθ perpendicular to OP in the plane ZOP, and r sin θ δψ perpendicular to this plane. The component velocities in these directions are therefore ṙ, rθ̇, r sin θψ̇, and if m be the mass of a moving particle at P we have
2T = m (ṙ2 + r2θ;̇2 + r2 sin2 θψ;̇2).
Hence the formula (11) gives
| m (r̈ − rθ̇2 − r sin2 θψ̇2) | = R, |
| d/dt (mr2θ̇) − mr2 · sin θ cos θψ̇2 | = Θ, |
| d/dt (mr2 sin2 θψ̇) | = Ψ. |
The quantities R, Θ, Ψ are the coefficients in the expression R δr + Θ δθ + Ψ δψ for the work done in an infinitely small displacement; viz. R is the radial component of force, Θ is the moment about a line through O perpendicular to the plane ZOP, and Ψ is the moment about OZ. In the case of the spherical pendulum we have r = l, Θ = − mgl sin θ, Ψ = 0, if OZ be drawn vertically downwards, and therefore
| θ̈ − sin θ cos θψ̇2 | = − (g/l) sin θ, |
| sin2 θψ̇ | = h, |
where h is a constant. The latter equation expresses that the angular momentum ml2 sin2 θψ̇ about the vertical OZ is constant. By elimination of ψ̇ we obtain
| θ̈ − h2 cos2 θ / sin3 θ = − | g | sin θ. |
| l |
If the particle describes a horizontal circle of angular radius α with constant angular velocity Ω, we have ω̇ = 0, h = Ω2 sin α, and therefore
| Ω2 = | g | cos α, |
| l |
as is otherwise evident from the elementary theory of uniform circular motion. To investigate the small oscillations about this state of steady motion we write θ = α + χ in (24) and neglect terms of the second order in χ. We find, after some reductions,
χ̈ + (1 + 3 cos2 α) Ω2χ = 0;
this shows that the variation of χ is simple-harmonic, with the period
2π / √(1 + 3 cos2 α)·Ω
As regards the most general motion of a spherical pendulum, it is obvious that a particle moving under gravity on a smooth sphere cannot pass through the highest or lowest point unless it describes a vertical circle. In all other cases there must be an upper and a lower limit to the altitude. Again, a vertical plane passing through O and a point where the motion is horizontal is evidently a plane of symmetry as regards the path. Hence the path will be confined between two horizontal circles which it touches alternately, and the direction of motion is never horizontal except at these circles. In the case of disturbed steady motion, just considered, these circles are nearly coincident. When both are near the lowest point the horizontal projection of the path is approximately an ellipse, as shown in § 13; a closer investigation shows that the ellipse is to be regarded as revolving about its centre with the angular velocity 2⁄3 abΩ/l2, where a, b are the semi-axes.
To apply the equations (11) to the case of the top we start with the expression (15) of § 21 for the kinetic energy, the simplified form (1) of § 20 being for the present purpose inadmissible, since it is essential that the generalized co-ordinates employed should be competent to specify the position of every particle. If λ, μ, ν be the components of momentum, we have
| λ = ∂T / ∂θ̇ | = Aθ̇, |
| μ = ∂T / ∂ψ̇ | = A sin2 θψ̇ + C (φ̇ + cos θψ̇) cos θ, |
| ν = ∂T / ∂φ̇ | = C (θ̇ + cos θψ̇). |
The meaning of these quantities is easily recognized; thus λ is the angular momentum about a horizontal axis normal to the plane of θ, μ is the angular momentum about the vertical OZ, and ν is the angular momentum about the axis of symmetry. If M be the total mass, the potential energy is V = Mgh cos θ, if OZ be drawn vertically upwards. Hence the equations (11) become
| Aθ̇ − A sin θ cos θψ̇2 + C (φ̇ + cos θψ̇) ψ̇ sin θ = Mgh sin θ, |
| d/dt · { A sin2 θψ̇ + C(φ̇ + cos θψ̇) cos θ } = 0, |
| d/dt · { C (φ̇ + cos θψ̇) } = 0, |
of which the last two express the constancy of the momenta μ, ν. Hence
Aθ̈ − A sin θ cos θψ̇2 + ν sin θψ̇ = Mgh sin θ,
A sin2 θψ̇ + ν cosθ = μ.
If we eliminate ψ̇ we obtain the equation (7) of § 20. The theory of disturbed precessional motion there outlined does not give a convenient view of the oscillations of the axis about the vertical position. If θ be small the equations (29) may be written
| θ̈ − θω̇2 = − | ν2 − 4AMgh | θ, |
| 4A2 |
θ2ω̇ = const.,
where
| ω = ψ − | ν | t. |
| 2A |
Since θ, ω are the polar co-ordinates (in a horizontal plane) of a point on the axis of symmetry, relative to an initial line which revolves with constant angular velocity ν/2A, we see by comparison with § 14 (15) (16) that the motion of such a point will be elliptic-harmonic superposed on a uniform rotation ν/2A, provided ν2 > 4AMgh. This gives (in essentials) the theory of the “gyroscopic pendulum.”
§ 23. Stability of Equilibrium. Theory of Vibrations.—If, in a conservative system, the configuration (q1, q2, ... qn) be one of equilibrium, the equations (14) of § 22 must be satisfied by q̇1, q̇2 ... q̇n = 0, whence
∂V / ∂qr = 0.
A necessary and sufficient condition of equilibrium is therefore that the value of the potential energy should be stationary for infinitesimal variations of the co-ordinates. If, further, V be a minimum, the equilibrium is necessarily stable, as was shown by P. G. L. Dirichlet (1846). In the motion consequent on any slight disturbance the total energy T + V is constant, and since T is essentially positive it follows that V can never exceed its equilibrium value by more than a slight amount, depending on the energy of the disturbance. This implies, on the present hypothesis, that there is an upper limit to the deviation of each co-ordinate from its equilibrium value; moreover, this limit diminishes indefinitely with the energy of the original disturbance. No such simple proof is available to show without qualification that the above condition is necessary. If, however, we recognize the existence of dissipative forces called into play by any motion whatever of the system, the conclusion can be drawn as follows. However slight these forces may be, the total energy T + V must continually diminish so long as the velocities q̇1, q̇2, ... q̇n differ from zero. Hence if the system be started from rest in a configuration for which V is less than in the equilibrium configuration considered, this quantity must still further decrease (since T cannot be negative), and it is evident that either the system will finally come to rest in some other equilibrium configuration, or V will in the long run diminish indefinitely. This argument is due to Lord Kelvin and P. G. Tait (1879).
In discussing the small oscillations of a system about a configuration of stable equilibrium it is convenient so to choose the generalized cc-ordinates q1, q2, ... qn that they shall vanish in the configuration in question. The potential energy is then given with sufficient approximation by an expression of the form
2V = c11q12 + c22q22 + ... + 2c12q1q2 + ...,
a constant term being irrelevant, and the terms of the first order being absent since the equilibrium value of V is stationary. The coefficients crr, crs are called coefficients of stability. We may further treat the coefficients of inertia arr, ars of § 22 (1) as constants. The Lagrangian equations of motion are then of the type
a1rq̈1 + a2rq̈2 + ... + anrq̈n + c1rq1 + c2rq2 + ... + cnrqn = Qr,
where Qr now stands for a component of extraneous force. In a free oscillation we have Q1, Q2, ... Qn = 0, and if we assume
qr = Ar eiσt,
we obtain n equations of the type
(c1r − σ2a1r) A1 + (c2r − σ2a2r) A2 + ... + (cnr − σ2anr) An = 0.
Eliminating the n − 1 ratios A1 : A2 : ... : An we obtain the determinantal equation
Δ (σ2) = 0,
where
| Δ(σ2) = | c11 − σ2a11, | c21 − σ2a21, | ..., | Cn1 − σ2anl |
| c12 − σ2a12, | c22 − σ2a22, | ..., | Cn2 − σ2an2 | |
| . | . | ... | . | |
| . | . | ... | . | |
| . | . | ... | . | |
| c1n − σ2a1n, | c2n − σ2a2n, | ..., | Cnn − σ2ann |
The quadratic expression for T is essentially positive, and the same holds with regard to V in virtue of the assumed stability. It may be shown algebraically that under these conditions the n roots of the above equation in σ2 are all real and positive. For any particular root, the equations (5) determine the ratios of the quantities A1, A2, ... An, the absolute values being alone arbitrary; these quantities are in fact proportional to the minors of any one row in the determinate Δ(σ2). By combining the solutions corresponding to a pair of equal and opposite values of σ we obtain a solution in real form:
qr = Car cos (σt + ε),
 |
| Fig. 85. |
where a1, a2 ... ar are a determinate series of quantities having to one another the above-mentioned ratios, whilst the constants C, ε are arbitrary. This solution, taken by itself, represents a motion in which each particle of the system (since its displacements parallel to Cartesian co-ordinate axes are linear functions of the q’s) executes a simple vibration of period 2π/σ. The amplitudes of oscillation of the various particles have definite ratios to one another, and the phases are in agreement, the absolute amplitude (depending on C) and the phase-constant (ε) being alone arbitrary. A vibration of this character is called a normal mode of vibration of the system; the number n of such modes is equal to that of the degrees of freedom possessed by the system. These statements require some modification when two or more of the roots of the equation (6) are equal. In the case of a multiple root the minors of Δ(σ2) all vanish, and the basis for the determination of the quantities ar disappears. Two or more normal modes then become to some extent indeterminate, and elliptic vibrations of the individual particles are possible. An example is furnished by the spherical pendulum (§ 13).
As an example of the method of determination of the normal modes we may take the “double pendulum.” A mass M hangs from a fixed point by a string of length a, and a second mass m hangs from M by a string of length b. For simplicity we will suppose that the motion is confined to one vertical plane. If θ, φ be the inclinations of the two strings to the vertical, we have, approximately,
| 2T = Ma2θ̇2 + m (aθ̇ + bψ̇)2 |
| 2V = Mgaθ2 + mg (aθ2 + bψ2). |
The equations (3) take the forms
| aθ ̈ + μbφ̈ + gθ = 0, |
| aθ ̈ + bφ̈ + gφ = 0. |
where μ = m/(M + m). Hence
| (σ2 − g/a) aθ + μσ2bφ = 0, |
| σ2aθ + (σ2 − g/b) bφ = 0. |
The frequency equation is therefore
(σ2 − g/a) (σ2 − g/b) − μσ4 = 0.
The roots of this quadratic in σ2 are easily seen to be real and positive. If M be large compared with m, μ is small, and the roots are g/a and g/b, approximately. In the normal mode corresponding to the former root, M swings almost like the bob of a simple pendulum of length a, being comparatively uninfluenced by the presence of m, whilst m executes a “forced” vibration (§ 12) of the corresponding period. In the second mode, M is nearly at rest [as appears from the second of equations (11)], whilst m swings almost like the bob of a simple pendulum of length b. Whatever the ratio M/m, the two values of σ2 can never be exactly equal, but they are approximately equal if a, b are nearly equal and μ is very small. A curious phenomenon is then to be observed; the motion of each particle, being made up (in general) of two superposed simple vibrations of nearly equal period, is seen to fluctuate greatly in extent, and if the amplitudes be equal we have periods of approximate rest, as in the case of “beats” in acoustics. The vibration then appears to be transferred alternately from m to M at regular intervals. If, on the other hand, M is small compared with m, μ is nearly equal to unity, and the roots of (12) are σ2 = g/(a + b) and σ2 = mg/M·(a + b)/ab, approximately. The former root makes θ = φ, nearly; in the corresponding normal mode m oscillates like the bob of a simple pendulum of length a + b. In the second mode aθ + bφ = 0, nearly, so that m is approximately at rest. The oscillation of M then resembles that of a particle at a distance a from one end of a string of length a + b fixed at the ends and subject to a tension mg.
The motion of the system consequent on arbitrary initial conditions may be obtained by superposition of the n normal modes with suitable amplitudes and phases. We have then
qr = αrθ + αr′θ′ + αr″θ″ + ...,
where
θ = C cos (σt + ε), θ′ = C′ cos (σ′t + ε), θ″ = C″ cos (σ″t + ε), ...
provided σ2, σ′2, σ″2, ... are the n roots of (6). The coefficients of θ, θ′, θ″, ... in (13) satisfy the conjugate or orthogonal relations
a11α1α1′ + a22α2α2′ + ... + a12 (α1α2′ + α2α1′) + ... = 0,
c11α1α1′ + c22α2α2′ + ... + c12 (α1α2′ + α2α1′) + ... = 0,
provided the symbols αr, αr′ correspond to two distinct roots σ2, σ′2 of (6). To prove these relations, we replace the symbols A1, A2, ... An in (5) by α1, α2, ... αn respectively, multiply the resulting equations by a′1, a′2, ... a′n, in order, and add. The result, owing to its symmetry, must still hold if we interchange accented and unaccented Greek letters, and by comparison we deduce (15) and (16), provided σ2 and σ′2 are unequal. The actual determination of C, C′, C″, ... and ε, ε′, ε″, ... in terms of the initial conditions is as follows. If we write
C cos ε = H, −C sin ε = K,
we must have
| αrH + αr′H′ + αr″H″ + ... | = [qr]0, |
| σαrH + σ′αr′H′ + σ″αr″H″ + ... | = [q̇r]0, |
where the zero suffix indicates initial values. These equations can be at once solved for H, H′, H″, ... and K, K′, K″, ... by means of the orthogonal relations (15).
By a suitable choice of the generalized co-ordinates it is possible to reduce T and V simultaneously to sums of squares. The transformation is in fact effected by the assumption (13), in virtue of the relations (15) (16), and we may write
2T = aθ̇2 + a′θ̇′2 + a″θ̇″2 + ...,
2V = cθ2 + c′θ′2 + c″θ″2 + ....
The new co-ordinates θ, θ′, θ″ ... are called the normal co-ordinates of the system; in a normal mode of vibration one of these varies alone. The physical characteristics of a normal mode are that an impulse of a particular normal type generates an initial velocity of that type only, and that a constant extraneous force of a particular normal type maintains a displacement of that type only. The normal modes are further distinguished by an important “stationary” property, as regards the frequency. If we imagine the system reduced by frictionless constraints to one degree of freedom, so that the co-ordinates θ, θ′, θ″, ... have prescribed ratios to one another, we have, from (19),
| σ2 = | cθ2 + c′θ′2 = c″θ″2 + ... | , |
| aθ2 + a′θ′2 + a″θ″2 + ... |
This shows that the value of σ2 for the constrained mode is intermediate to the greatest and least of the values c/a, c′/a′, c″/a″, ... proper to the several normal modes. Also that if the constrained mode differs little from a normal mode of free vibration (e.g. if θ′, θ″, ... are small compared with θ), the change in the frequency is of the second order. This property can often be utilized to estimate the frequency of the gravest normal mode of a system, by means of an assumed approximate type, when the exact determination would be difficult. It also appears that an estimate thus obtained is necessarily too high.
From another point of view it is easily recognized that the equations (5) are exactly those to which we are led in the ordinary process of finding the stationary values of the function
| V (q1, q2, ... qn) | , |
| T (q1, q2, ... qn) |
where the denominator stands for the same homogeneous quadratic function of the q’s that T is for the q̇’s. It is easy to construct in this connexion a proof that the n values of σ2 are all real and positive.
The case of three degrees of freedom is instructive on account of the geometrical analogies. With a view to these we may write
| 2T = aẋ2 + bẏ2 + cż2 + 2fẏż + 2gżẋ + 2hẋẏ, |
| 2V = Ax2 + By2 + Cz2 + 2Fyz + 2Gzx + 2Hxy. |
It is obvious that the ratio
| V (x, y, z) |
| T (x, y, z) |
must have a least value, which is moreover positive, since the numerator and denominator are both essentially positive. Denoting this value by σ12, we have
| Ax1 + Hy1 + Gz1 = σ12 (ax1 + hy1 + ∂gz1), |
| Hx1 + By1 + Fz1 = σ12 (hx1 + by1 + fz1), |
| Gx1 + Fy1 + Cz1 = σ12 (gx1 + fy1 + cz1), |
provided x1 : y1 : z1 be the corresponding values of the ratios x:y:z. Again, the expression (22) will also have a least value when the ratios x : y : z are subject to the condition
| x1 | ∂V | + y1 | ∂V | + z1 | ∂V | = 0; |
| ∂x | ∂y | ∂z |
and if this be denoted by σ22 we have a second system of equations similar to (23). The remaining value σ22 is the value of (22) when x : y : z arc chosen so as to satisfy (24) and
| x2 | ∂V | + y2 | ∂V | + z2 | ∂V | = 0; |
| ∂x | ∂y | ∂z |
The problem is identical with that of finding the common conjugate diameters of the ellipsoids T(x, y, z) = const., V(x, y, z) = const. If in (21) we imagine that x, y, z denote infinitesimal rotations of a solid free to turn about a fixed point in a given field of force, it appears that the three normal modes consist each of a rotation about one of the three diameters aforesaid, and that the values of σ are proportional to the ratios of the lengths of corresponding diameters of the two quadrics.
We proceed to the forced vibrations of the system. The typical case is where the extraneous forces are of the simple-harmonic type cos (σt + ε); the most general law of variation with time can be derived from this by superposition, in virtue of Fourier’s theorem. Analytically, it is convenient to put Qr, equal to eiσt multiplied by a complex coefficient; owing to the linearity of the equations the factor eiσt will run through them all, and need not always be exhibited. For a system of one degree of freedom we have
aq̈ + cq = Q,
and therefore on the present supposition as to the nature of Q
| q = | Q | . |
| c − σ2a |
This solution has been discussed to some extent in § 12, in connexion with the forced oscillations of a pendulum. We may note further that when σ is small the displacement q has the “equilibrium value” Q/c, the same as would be produced by a steady force equal to the instantaneous value of the actual force, the inertia of the system being inoperative. On the other hand, when σ2 is great q tends to the value −Q/σ2a, the same as if the potential energy were ignored. When there are n degrees of freedom we have from
(c1r − σ2a2r) q1 + (c22r − σ2a2r) q2 + ... + (cnr − σ2anr) qn = Qr,
and therefore
Δ(σ2) · qr = a1rQ1 + a2rQ2 + ... + anrQn,
where a1r, a2r, ... anr are the minors of the rth row of the determinant (7). Every particle of the system executes in general a simple vibration of the imposed period 2π/σ, and all the particles pass simultaneously through their equilibrium positions. The amplitude becomes very great when σ2 approximates to a root of (6), i.e. when the imposed period nearly coincides with one of the free periods. Since ars = asr, the coefficient of Qs in the expression for qr is identical with that of Qr in the expression for qs. Various important “reciprocal theorems” formulated by H. Helmholtz and Lord Rayleigh are founded on this relation. Free vibrations must of course be superposed on the forced vibrations given by (29) in order to obtain the complete solution of the dynamical equations.
In practice the vibrations of a system are more or less affected by dissipative forces. In order to obtain at all events a qualitative representation of these it is usual to introduce into the equations frictional terms proportional to the velocities. Thus in the case of one degree of freedom we have, in place of (26),
aq̈ + bq̇ + cq = Q,
where a, b, c are positive. The solution of this has been sufficiently discussed in § 12. In the case of multiple freedom, the equations of small motion when modified by the introduction of terms proportional to the velocities are of the type
| d | ∂T | + B1rq̇1 + B2rq̇2 + ... + Bnrq̇n + | ∂V | = Qr. | |
| dt | ∂q̇r | ∂qr |
If we put
brs = bsr = 1⁄2 (Brs + Bsr), βrs = −βsr = 1⁄2 (Brs − Bsr),
this may be written
| d | ∂T | + | ∂F | + β1rq̇1 + β2rq̇2 + ... + βnrq̇r + | ∂V | = Qr, | |
| dt | ∂q̇r | ∂q̇r | ∂qr |
provided
2F = b11q̇12 + b22q̇22 + ... + 2b12q̇1q̇2 + ...
The terms due to F in (33) are such as would arise from frictional resistances proportional to the absolute velocities of the particles, or to mutual forces of resistance proportional to the relative velocities; they are therefore classed as frictional or dissipative forces. The terms affected with the coefficients βrs on the other hand are such as occur in “cyclic” systems with latent motion (Dynamics, § Analytical); they are called the gyrostatic terms. If we multiply (33) by q̇r and sum with respect to r from 1 to n, we obtain, in virtue of the relations βrs = −βsr, βrr = 0,
| d | (T + V) = 2F + Q1q̇1 + Q2q̇2 + ... + Qnq̇n. |
| dt |
This shows that mechanical energy is lost at the rate 2F per unit time. The function F is therefore called by Lord Rayleigh the dissipation function.
If we omit the gyrostatic terms, and write qr = Creλt, we find, for a free vibration,
(a1rλ2 + b1rλ + c1r) C1 + (a2rλ2 + b2rλ + c2r) C2 + ...
+ (anrλ2 + bnrλ + cnr) Cn = 0.
This leads to a determinantal equation in λ whose 2n roots are either real and negative, or complex with negative real parts, on the present hypothesis that the functions T, V, F are all essentially positive. If we combine the solutions corresponding to a pair of conjugate complex roots, we obtain, in real form,
qr = Cαr e−t/τ cos (σt + ε − εr),
where σ, τ, αr, εr are determined by the constitution of the system, whilst C, ε are arbitrary, and independent of r. The n formulae of this type represent a normal mode of free vibration: the individual particles revolve as a rule in elliptic orbits which gradually contract according to the law indicated by the exponential factor. If the friction be relatively small, all the normal modes are of this character, and unless two or more values of σ are nearly equal the elliptic orbits are very elongated. The effect of friction on the period is moreover of the second order.
In a forced vibration of eiσt the variation of each co-ordinate is simple-harmonic, with the prescribed period, but there is a retardation of phase as compared with the force. If the friction be small the amplitude becomes relatively very great if the imposed period approximate to a free period. The validity of the “reciprocal theorems” of Helmholtz and Lord Rayleigh, already referred to, is not affected by frictional forces of the kind here considered.
The most important applications of the theory of vibrations are to the case of continuous systems such as strings, bars, membranes, plates, columns of air, where the number of degrees of freedom is infinite. The series of equations of the type (3) is then replaced by a single linear partial differential equation, or by a set of two or three such equations, according to the number of dependent variables. These variables represent the whole assemblage of generalized co-ordinates qr; they are continuous functions of the independent variables x, y, z whose range of variation corresponds to that of the index r, and of t. For example, in a one-dimensional system such as a string or a bar, we have one dependent variable, and two independent variables x and t. To determine the free oscillations we assume a time factor eiσt; the equations then become linear differential equations between the dependent variables of the problem and the independent variables x, or x, y, or x, y, z as the case may be. If the range of the independent variable or variables is unlimited, the value of σ is at our disposal, and the solution gives us the laws of wave-propagation (see Wave). If, on the other hand, the body is finite, certain terminal conditions have to be satisfied. These limit the admissible values of σ, which are in general determined 994 by a transcendental equation corresponding to the determinantal equation (6).
Numerous examples of this procedure, and of the corresponding treatment of forced oscillations, present themselves in theoretical acoustics. It must suffice here to consider the small oscillations of a chain hanging vertically from a fixed extremity. If x be measured upwards from the lower end, the horizontal component of the tension P at any point will be Pδy/δx, approximately, if y denote the lateral displacement. Hence, forming the equation of motion of a mass-element, ρδx, we have
ρ δx · ÿ = δ (P · ∂y/∂x).
Neglecting the vertical acceleration we have P = gρx, whence
| ∂2y | = g | ∂ | ( x | ∂y | ). |
| ∂t2 | ∂x | ∂x |
Assuming that y varies as eiσt we have
| ∂ | ( x | ∂y | ) + ky = 0. |
| ∂x | ∂x |
provided k = σ2/g. The solution of (40) which is finite for x = 0 is readily obtained in the form of a series, thus
| y = C ( 1 − | kx | + | k2x2 | − ... ) = CJ0(z), |
| 12 | 1222 |
in the notation of Bessel’s functions, if z2 = 4kx. Since y must vanish at the upper end (x = l), the admissible values of σ are determined by
σ2 = gz2/4l, J0(z) = 0.
The function J0(z) has been tabulated; its lower roots are given by
z/π= .7655, 1.7571, 2.7546,...,
approximately, where the numbers tend to the form s − 1⁄4. The frequency of the gravest mode is to that of a uniform bar in the ratio .9815 That this ratio should be less than unity agrees with the theory of “constrained types” already given. In the higher normal modes there are nodes or points of rest (y = 0); thus in the second mode there is a node at a distance .190l from the lower end.
Authorities.—For indications as to the earlier history of the subject see W. W. R. Ball, Short Account of the History of Mathematics; M. Cantor, Geschichte der Mathematik (Leipzig, 1880 ... ); J. Cox, Mechanics (Cambridge, 1904); E. Mach, Die Mechanik in ihrer Entwickelung (4th ed., Leipzig, 1901; Eng. trans.). Of the classical treatises which have had a notable influence on the development of the subject, and which may still be consulted with advantage, we may note particularly, Sir I. Newton, Philosophiae naturalis Principia Mathematica (1st ed., London, 1687); J. L. Lagrange, Mécanique analytique (2nd ed., Paris, 1811-1815); P. S. Laplace, Mécanique céleste (Paris, 1799-1825); A. F. Möbius, Lehrbuch der Statik (Leipzig, 1837), and Mechanik des Himmels; L. Poinsot, Éléments de statique (Paris, 1804), and Théorie nouvelle de la rotation des corps (Paris, 1834).
Of the more recent general treatises we may mention Sir W. Thomson (Lord Kelvin) and P. G. Tait, Natural Philosophy (2nd ed., Cambridge, 1879-1883); E. J. Routh, Analytical Statics (2nd ed., Cambridge, 1896), Dynamics of a Particle (Cambridge, 1898), Rigid Dynamics (6th ed., Cambridge 1905); G. Minchin, Statics (4th ed., Oxford, 1888); A. E. H. Love, Theoretical Mechanics (2nd ed., Cambridge, 1909); A. G. Webster, Dynamics of Particles, &c. (1904); E. T. Whittaker, Analytical Dynamics (Cambridge, 1904); L. Arnal, Traitê de mécanique (1888-1898); P. Appell, Mécanique rationelle (Paris, vols. i. and ii., 2nd ed., 1902 and 1904; vol. iii., 1st ed., 1896); G. Kirchhoff, Vorlesungen über Mechanik (Leipzig, 1896); H. Helmholtz, Vorlesungen über theoretische Physik, vol. i. (Leipzig, 1898); J. Somoff, Theoretische Mechanik (Leipzig, 1878-1879).
The literature of graphical statics and its technical applications is very extensive. We may mention K. Culmann, Graphische Statik (2nd ed., Zürich, 1895); A. Föppl, Technische Mechanik, vol. ii. (Leipzig, 1900); L. Henneberg, Statik des starren Systems (Darmstadt, 1886); M. Lévy, La statique graphique (2nd ed., Paris, 1886-1888); H. Müller-Breslau, Graphische Statik (3rd ed., Berlin, 1901). Sir R. S. Ball’s highly original investigations in kinematics and dynamics were published in collected form under the title Theory of Screws (Cambridge, 1900).
Detailed accounts of the developments of the various branches of the subject from the beginning of the 19th century to the present time, with full bibliographical references, are given in the fourth volume (edited by Professor F. Klein) of the Encyclopädie der mathematischen Wissenschaften (Leipzig). There is a French translation of this work. (See also Dynamics.)
II.—Applied Mechanics1
§ 1. The practical application of mechanics may be divided into two classes, according as the assemblages of material objects to which they relate are intended to remain fixed or to move relatively to each other—the former class being comprehended under the term “Theory of Structures” and the latter under the term “Theory of Machines.”
PART I.—OUTLINE OF THE THEORY OF STRUCTURES
§ 2. Support of Structures.—Every structure, as a whole, is maintained in equilibrium by the joint action of its own weight, of the external load or pressure applied to it from without and tending to displace it, and of the resistance of the material which supports it. A structure is supported either by resting on the solid crust of the earth, as buildings do, or by floating in a fluid, as ships do in water and balloons in air. The principles of the support of a floating structure form an important part of Hydromechanics (q.v.). The principles of the support, as a whole, of a structure resting on the land, are so far identical with those which regulate the equilibrium and stability of the several parts of that structure that the only principle which seems to require special mention here is one which comprehends in one statement the power both of liquids and of loose earth to support structures. This was first demonstrated in a paper “On the Stability of Loose Earth,” read to the Royal Society on the 19th of June 1856 (Phil. Trans. 1856), as follows:—
Let E represent the weight of the portion of a horizontal stratum of earth which is displaced by the foundation of a structure, S the utmost weight of that structure consistently with the power of the earth to resist displacement, φ the angle of repose of the earth; then
| S | = ( | 1 + sin φ | )2. |
| E | 1 − sin φ |
To apply this to liquids φ must be made zero, and then S/E = 1, as is well known. For a proof of this expression see Rankine’s Applied Mechanics, 17th ed., p. 219.
§ 3. Composition of a Structure, and Connexion of its Pieces.—A structure is composed of pieces,—such as the stones of a building in masonry, the beams of a timber framework, the bars, plates and bolts of an iron bridge. Those pieces are connected at their joints or surfaces of mutual contact, either by simple pressure and friction (as in masonry with moist mortar or without mortar), by pressure and adhesion (as in masonry with cement or with hardened mortar, and timber with glue), or by the resistance of fastenings of different kinds, whether made by means of the form of the joint (as dovetails, notches, mortices and tenons) or by separate fastening pieces (as trenails, pins, spikes, nails, holdfasts, screws, bolts, rivets, hoops, straps and sockets.)
§ 4. Stability, Stiffness and Strength.—A structure may be damaged or destroyed in three ways:—first, by displacement of its pieces from their proper positions relatively to each other or to the earth; secondly by disfigurement of one or more of those pieces, owing to their being unable to preserve their proper shapes under the pressures to which they are subjected; thirdly, by breaking of one or more of those pieces. The power of resisting displacement constitutes stability, the power of each piece to resist disfigurement is its stiffness; and its power to resist breaking, its strength.
§ 5. Conditions of Stability.—The principles of the stability of a structure can be to a certain extent investigated independently of the stiffness and strength, by assuming, in the first instance, that each piece has strength sufficient to be safe against being broken, and stiffness sufficient to prevent its being disfigured to an extent inconsistent with the purposes of the structure, by the greatest forces which are to be applied to it. The condition that each piece of the structure is to be maintained in equilibrium by having its gross load, consisting of its own weight and of the external pressure applied to it, balanced by the resistances or pressures exerted between it and the contiguous pieces, furnishes the means of determining the magnitude, position and direction of the resistances required at each joint in order to produce equilibrium; and the conditions of stability are, first, that the position, and, secondly, that the direction, of the resistance required at each joint shall, under all the variations to which the load is subject, be such as the joint is capable of exerting—conditions which are fulfilled by suitably adjusting the figures and positions of the joints, and the ratios of the gross loads of the pieces. As for the magnitude of the resistance, it is limited by conditions, not of stability, but of strength and stiffness.
§ 6. Principle of Least Resistance.—Where more than one system of resistances are alike capable of balancing the same system of loads applied to a given structure, the smallest of those alternative systems, as was demonstrated by the Rev. Henry Moseley in his Mechanics of Engineering and Architecture, is that which will actually be exerted—because 995 the resistances to displacement are the effect of a strained state of the pieces, which strained state is the effect of the load, and when the load is applied the strained state and the resistances produced by it increase until the resistances acquire just those magnitudes which are sufficient to balance the load, after which they increase no further.
This principle of least resistance renders determinate many problems in the statics of structures which were formerly considered indeterminate.
§ 7. Relations between Polygons of Loads and of Resistances.—In a structure in which each piece is supported at two joints only, the well-known laws of statics show that the directions of the gross load on each piece and of the two resistances by which it is supported must lie in one plane, must either be parallel or meet in one point, and must bear to each other, if not parallel, the proportions of the sides of a triangle respectively parallel to their directions, and, if parallel, such proportions that each of the three forces shall be proportional to the distance between the other two,—all the three distances being measured along one direction.
 |
| Fig. 86. |
Considering, in the first place, the case in which the load and the two resistances by which each piece is balanced meet in one point, which may be called the centre of load, there will be as many such points of intersection, or centres of load, as there are pieces in the structure; and the directions and positions of the resistances or mutual pressures exerted between the pieces will be represented by the sides of a polygon joining those points, as in fig. 86 where P1, P2, P3, P4 represent the centres of load in a structure of four pieces, and the sides of the polygon of resistances P1 P2 P3 P4 represent respectively the directions and positions of the resistances exerted at the joints. Further, at any one of the centres of load let PL represent the magnitude and direction of the gross load, and Pa, Pb the two resistances by which the piece to which that load is applied is supported; then will those three lines be respectively the diagonal and sides of a parallelogram; or, what is the same thing, they will be equal to the three sides of a triangle; and they must be in the same plane, although the sides of the polygon of resistances may be in different planes.
 |
| Fig. 87. |
According to a well-known principle of statics, because the loads or external pressures P1L1, &c., balance each other, they must be proportional to the sides of a closed polygon drawn respectively parallel to their directions. In fig. 87 construct such a polygon of loads by drawing the lines L1, &c., parallel and proportional to, and joined end to end in the order of, the gross loads on the pieces of the structure. Then from the proportionality and parallelism of the load and the two resistances applied to each piece of the structure to the three sides of a triangle, there results the following theorem (originally due to Rankine):—
If from the angles of the polygon of loads there be drawn lines (R1, R2, &c.), each of which is parallel to the resistance (as P1P2, &c.) exerted at the joint between the pieces to which the two loads represented by the contiguous sides of the polygon of loads (such as L1, L2, &c.) are applied; then will all those lines meet in one point (O), and their lengths, measured from that point to the angles of the polygon, will represent the magnitudes of the resistances to which they are respectively parallel.
When the load on one of the pieces is parallel to the resistances which balance it, the polygon of resistances ceases to be closed, two of the sides becoming parallel to each other and to the load in question, and extending indefinitely. In the polygon of loads the direction of a load sustained by parallel resistances traverses the point O.2
§ 8. How the Earth’s Resistance is to be treated.... When the pressure exerted by a structure on the earth (to which the earth’s resistance is equal and opposite) consists either of one pressure, which is necessarily the resultant of the weight of the structure and of all the other forces applied to it, or of two or more parallel vertical forces, whose amount can be determined at the outset of the investigation, the resistance of the earth can be treated as one or more upward loads applied to the structure. But in other cases the earth is to be treated as one of the pieces of the structure, loaded with a force equal and opposite in direction and position to the resultant of the weight of the structure and of the other pressures applied to it.
§ 9. Partial Polygons of Resistance.—In a structure in which there are pieces supported at more than two joints, let a polygon be constructed of lines connecting the centres of load of any continuous series of pieces. This may be called a partial polygon of resistances. In considering its properties, the load at each centre of load is to be held to include the resistances of those joints which are not comprehended in the partial polygon of resistances, to which the theorem of § 7 will then apply in every respect. By constructing several partial polygons, and computing the relations between the loads and resistances which are determined by the application of that theorem to each of them, with the aid, if necessary, of Moseley’s principle of the least resistance, the whole of the relations amongst the loads and resistances may be found.
§ 10. Line of Pressures—Centres and Line of Resistance.—The line of pressures is a line to which the directions of all the resistances in one polygon are tangents. The centre of resistance at any joint is the point where the line representing the total resistance exerted at that joint intersects the joint. The line of resistance is a line traversing all the centres of resistance of a series of joints,—its form, in the positions intermediate between the actual joints of the structure, being determined by supposing the pieces and their loads to be subdivided by the introduction of intermediate joints ad infinitum, and finding the continuous line, curved or straight, in which the intermediate centres of resistance are all situated, however great their number. The difference between the line of resistance and the line of pressures was first pointed out by Moseley.
 |
| Fig. 88. |
§ 11.* The principles of the two preceding sections may be illustrated by the consideration of a particular case of a buttress of blocks forming a continuous series of pieces (fig. 88), where aa, bb, cc, dd represent plane joints. Let the centre of pressure C at the first joint aa be known, and also the pressure P acting at C in direction and magnitude. Find R1 the resultant of this pressure, the weight of the block aabb acting through its centre of gravity, and any other external force which may be acting on the block, and produce its line of action to cut the joint bb in C1. C1 is then the centre of pressure for the joint bb, and R1 is the total force acting there. Repeating this process for each block in succession there will be found the centres of pressure C2, C3, &c., and also the resultant pressures R2, R3, &c., acting at these respective centres. The centres of pressure at the joints are also called centres of resistance, and the curve passing through these points is called a line of resistance. Let all the resultants acting at the several centres of resistance be produced until they cut one another in a series of points so as to form an unclosed polygon. This polygon is the partial polygon of resistance. A curve tangential to all the sides of the polygon is the line of pressures.
§ 12. Stability of Position, and Stability of Friction.—The resistances at the several joints having been determined by the principles set forth in §§ 6, 7, 8, 9 and 10, not only under the ordinary load of the structure, but under all the variations to which the load is subject as to amount and distribution, the joints are now to be placed and shaped so that the pieces shall not suffer relative displacement under any of those loads. The relative displacement of the two pieces which abut against each other at a joint may take place either 996 by turning or by sliding. Safety against displacement by turning is called stability of position; safety against displacement by sliding, stability of friction.
§ 13. Condition of Stability of Position.—If the materials of a structure were infinitely stiff and strong, stability of position at any joint would be insured simply by making the centre of resistance fall within the joint under all possible variations of load. In order to allow for the finite stiffness and strength of materials, the least distance of the centre of resistance inward from the nearest edge of the joint is made to bear a definite proportion to the depth of the joint measured in the same direction, which proportion is fixed, sometimes empirically, sometimes by theoretical deduction from the laws of the strength of materials. That least distance is called by Moseley the modulus of stability. The following are some of the ratios of the modulus of stability to the depth of the joint which occur in practice:—
| Retaining walls, as designed by British engineers | 1 : 8 |
| Retaining walls, as designed by French engineers | 1 : 5 |
| Rectangular piers of bridges and other buildings, and arch-stones | 1 : 3 |
| Rectangular foundations, firm ground | 1 : 3 |
| Rectangular foundations, very soft ground | 1 : 2 |
| Rectangular foundations, intermediate kinds of ground | 1 : 3 to 1 : 2 |
| Thin, hollow towers (such as furnace chimneys exposed to high winds), square | 1 : 6 |
| Thin, hollow towers, circular | 1 : 4 |
| Frames of timber or metal, under their ordinary or average distribution of load | 1 : 3 |
| Frames of timber or metal, under the greatest irregularities of load | 1 : 3 |
In the case of the towers, the depth of the joint is to be understood to mean the diameter of the tower.
 |
| Fig. 89. |
§ 14. Condition of Stability of Friction.—If the resistance to be exerted at a joint is always perpendicular to the surfaces which abut at and form that joint, there is no tendency of the pieces to be displaced by sliding. If the resistance be oblique, let JK (fig. 89) be the joint, C its centre of resistance, CR a line representing the resistance, CN a perpendicular to the joint at the centre of resistance. The angle NCR is the obliquity of the resistance. From R draw RP parallel and RQ perpendicular to the joint; then, by the principles of statics, the component of the resistance normal to the joint is—
CP = CR · cos PCR;
and the component tangential to the joint is—
CQ = CR · sin PCR = CP · tan PCR.
If the joint be provided either with projections and recesses, such as mortises and tenons, or with fastenings, such as pins or bolts, so as to resist displacement by sliding, the question of the utmost amount of the tangential resistance CQ which it is capable of exerting depends on the strength of such projections, recesses, or fastenings; and belongs to the subject of strength, and not to that of stability. In other cases the safety of the joint against displacement by sliding depends on its power of exerting friction, and that power depends on the law, known by experiment, that the friction between two surfaces bears a constant ratio, depending on the nature of the surfaces, to the force by which they are pressed together. In order that the surfaces which abut at the joint JK may be pressed together, the resistance required by the conditions of equilibrium CR, must be a thrust and not a pull; and in that case the force by which the surfaces are pressed together is equal and opposite to the normal component CP of the resistance. The condition of stability of friction is that the tangential component CQ of the resistance required shall not exceed the friction due to the normal component; that is, that
CQ ≯ ƒ · CP,
where ƒ denotes the coefficient of friction for the surfaces in question. The angle whose tangent is the coefficient of friction is called the angle of repose, and is expressed symbolically by—
φ = tan −1 ƒ.
Now CQ = CP · tan PCR;
consequently the condition of stability of friction is fulfilled if the angle PCR is not greater than φ; that is to say, if the obliquity of the resistance required at the joint does not exceed the angle of repose; and this condition ought to be fulfilled under all possible variations of the load.
It is chiefly in masonry and earthwork that stability of friction is relied on.
§ 15. Stability of Friction in Earth.—The grains of a mass of loose earth are to be regarded as so many separate pieces abutting against each other at joints in all possible positions, and depending for their stability on friction. To determine whether a mass of earth is stable at a given point, conceive that point to be traversed by planes in all possible positions, and determine which position gives the greatest obliquity to the total pressure exerted between the portions of the mass which abut against each other at the plane. The condition of stability is that this obliquity shall not exceed the angle of repose of the earth. The consequences of this principle are developed in a paper, “On the Stability of Loose Earth,” already cited in § 2.
§ 16. Parallel Projections of Figures.—If any figure be referred to a system of co-ordinates, rectangular or oblique, and if a second figure be constructed by means of a second system of co-ordinates, rectangular or oblique, and either agreeing with or differing from the first system in rectangularity or obliquity, but so related to the co-ordinates of the first figure that for each point in the first figure there shall be a corresponding point in the second figure, the lengths of whose co-ordinates shall bear respectively to the three corresponding co-ordinates of the corresponding point in the first figure three ratios which are the same for every pair of corresponding points in the two figures, these corresponding figures are called parallel projections of each other. The properties of parallel projections of most importance to the subject of the present article are the following:—
(1) A parallel projection of a straight line is a straight line.
(2) A parallel projection of a plane is a plane.
(3) A parallel projection of a straight line or a plane surface divided in a given ratio is a straight line or a plane surface divided in the same ratio.
(4) A parallel projection of a pair of equal and parallel straight lines, or plain surfaces, is a pair of equal and parallel straight lines, or plane surfaces; whence it follows
(5) That a parallel projection of a parallelogram is a parallelogram, and
(6) That a parallel projection of a parallelepiped is a parallelepiped.
(7) A parallel projection of a pair of solids having a given ratio is a pair of solids having the same ratio.
Though not essential for the purposes of the present article, the following consequence will serve to illustrate the principle of parallel projections:—
(8) A parallel projection of a curve, or of a surface of a given algebraical order, is a curve or a surface of the same order.
For example, all ellipsoids referred to co-ordinates parallel to any three conjugate diameters are parallel projections of each other and of a sphere referred to rectangular co-ordinates.
§ 17. Parallel Projections of Systems of Forces.—If a balanced system of forces be represented by a system of lines, then will every parallel projection of that system of lines represent a balanced system of forces.
For the condition of equilibrium of forces not parallel is that they shall be represented in direction and magnitude by the sides and diagonals of certain parallelograms, and of parallel forces that they shall divide certain straight lines in certain ratios; and the parallel projection of a parallelogram is a parallelogram, and that of a straight line divided in a given ratio is a straight line divided in the same ratio.
The resultant of a parallel projection of any system of forces is the projection of their resultant; and the centre of gravity of a parallel projection of a solid is the projection of the centre of gravity of the first solid.
§ 18. Principle of the Transformation of Structures.—Here we have the following theorem: If a structure of a given figure have stability of position under a system of forces represented by a given system of lines, then will any structure whose figure is a parallel projection of that of the first structure have stability of position under a system of forces represented by the corresponding projection of the first system of lines.
For in the second structure the weights, external pressures, and resistances will balance each other as in the first structure; the weights of the pieces and all other parallel systems of forces will have the same ratios as in the first structure; and the several centres of resistance will divide the depths of the joints in the same proportions as in the first structure.
If the first structure have stability of friction, the second structure will have stability of friction also, so long as the effect of the projection is not to increase the obliquity of the resistance at any joint beyond the angle of repose.
The lines representing the forces in the second figure show their relative directions and magnitudes. To find their absolute directions and magnitudes, a vertical line is to be drawn in the first figure, of such a length as to represent the weight of a particular portion of the structure. Then will the projection of that line in the projected figure indicate the vertical direction, and represent the weight of the part of the second structure corresponding to the before-mentioned portion of the first structure.
The foregoing “principle of the transformation of structures” was first announced, though in a somewhat less comprehensive form, to the Royal Society on the 6th of March 1856. It is useful in practice, by enabling the engineer easily to deduce the conditions of equilibrium and stability of structures of complex and unsymmetrical figures from those of structures of simple and symmetrical figures. By its aid, for example, the whole of the properties of 997 elliptical arches, whether square or skew, whether level or sloping in their span, are at once deduced by projection from those of symmetrical circular arches, and the properties of ellipsoidal and elliptic-conoidal domes from those of hemispherical and circular-conoidal domes; and the figures of arches fitted to resist the thrust of earth, which is less horizontally than vertically in a certain given ratio, can be deduced by a projection from those of arches fitted to resist the thrust of a liquid, which is of equal intensity, horizontally and vertically.
§ 19. Conditions of Stiffness and Strength.—After the arrangement of the pieces of a structure and the size and figure of their joints or surfaces of contact have been determined so as to fulfil the conditions of stability,—conditions which depend mainly on the position and direction of the resultant or total load on each piece, and the relative magnitude of the loads on the different pieces—the dimensions of each piece singly have to be adjusted so as to fulfil the conditions of stiffness and strength—conditions which depend not only on the absolute magnitude of the load on each piece, and of the resistances by which it is balanced, but also on the mode of distribution of the load over the piece, and of the resistances over the joints.
The effect of the pressures applied to a piece, consisting of the load and the supporting resistances, is to force the piece into a state of strain or disfigurement, which increases until the elasticity, or resistance to strain, of the material causes it to exert a stress, or effort to recover its figure, equal and opposite to the system of applied pressures. The condition of stiffness is that the strain or disfigurement shall not be greater than is consistent with the purposes of the structure; and the condition of strength is that the stress shall be within the limits of that which the material can bear with safety against breaking. The ratio in which the utmost stress before breaking exceeds the safe working stress is called the factor of safety, and is determined empirically. It varies from three to twelve for various materials and structures. (See Strength of Materials.)
PART II. THEORY OF MACHINES
§ 20. Parts of a Machine: Frame and Mechanism.—The parts of a machine may be distinguished into two principal divisions,—the frame, or fixed parts, and the mechanism, or moving parts. The frame is a structure which supports the pieces of the mechanism, and to a certain extent determines the nature of their motions.
The form and arrangement of the pieces of the frame depend upon the arrangement and the motions of the mechanism; the dimensions of the pieces of the frame required in order to give it stability and strength are determined from the pressures applied to it by means of the mechanism. It appears therefore that in general the mechanism is to be designed first and the frame afterwards, and that the designing of the frame is regulated by the principles of the stability of structures and of the strength and stiffness of materials,—care being taken to adapt the frame to the most severe load which can be thrown upon it at any period of the action of the mechanism.
Each independent piece of the mechanism also is a structure, and its dimensions are to be adapted, according to the principles of the strength and stiffness of materials, to the most severe load to which it can be subjected during the action of the machine.
§ 21. Definition and Division of the Theory of Machines.—From what has been said in the last section it appears that the department of the art of designing machines which has reference to the stability of the frame and to the stiffness and strength of the frame and mechanism is a branch of the art of construction. It is therefore to be separated from the theory of machines, properly speaking, which has reference to the action of machines considered as moving. In the action of a machine the following three things take place:—
Firstly, Some natural source of energy communicates motion and force to a piece or pieces of the mechanism, called the receiver of power or prime mover.
Secondly, The motion and force are transmitted from the prime mover through the train of mechanism to the working piece or pieces, and during that transmission the motion and force are modified in amount and direction, so as to be rendered suitable for the purpose to which they are to be applied.
Thirdly, The working piece or pieces by their motion, or by their motion and force combined, produce some useful effect.
Such are the phenomena of the action of a machine, arranged in the order of causation. But in studying or treating of the theory of machines, the order of simplicity is the best; and in this order the first branch of the subject is the modification of motion and force by the train of mechanism; the next is the effect or purpose of the machine; and the last, or most complex, is the action of the prime mover.
The modification of motion and the modification of force take place together, and are connected by certain laws; but in the study of the theory of machines, as well as in that of pure mechanics, much advantage has been gained in point of clearness and simplicity by first considering alone the principles of the modification of motion, which are founded upon what is now known as Kinematics, and afterwards considering the principles of the combined modification of motion and force, which are founded both on geometry and on the laws of dynamics. The separation of kinematics from dynamics is due mainly to G. Monge, Ampère and R. Willis.
The theory of machines in the present article will be considered under the following heads:—
I. Pure Mechanism, or Applied Kinematics; being the theory of machines considered simply as modifying motion.
II. Applied Dynamics; being the theory of machines considered as modifying both motion and force.
Chap. I. On Pure Mechanism
§ 22. Division of the Subject.—Proceeding in the order of simplicity, the subject of Pure Mechanism, or Applied Kinematics, may be thus divided:—
Division 1.—Motion of a point.
Division 2.—Motion of the surface of a fluid.
Division 3.—Motion of a rigid solid.
Division 4.—Motions of a pair of connected pieces, or of an “elementary combination” in mechanism.
Division 5.—Motions of trains of pieces of mechanism.
Division 6.—Motions of sets of more than two connected pieces, or of “aggregate combinations.”
A point is the boundary of a line, which is the boundary of a surface, which is the boundary of a volume. Points, lines and surfaces have no independent existence, and consequently those divisions of this chapter which relate to their motions are only preliminary to the subsequent divisions, which relate to the motions of bodies.
Division 1. Motion of a Point.
§ 23. Comparative Motion.—The comparative motion of two points is the relation which exists between their motions, without having regard to their absolute amounts. It consists of two elements,—the velocity ratio, which is the ratio of any two magnitudes bearing to each other the proportions of the respective velocities of the two points at a given instant, and the directional relation, which is the relation borne to each other by the respective directions of the motions of the two points at the same given instant.
It is obvious that the motions of a pair of points may be varied in any manner, whether by direct or by lateral deviation, and yet that their comparative motion may remain constant, in consequence of the deviations taking place in the same proportions, in the same directions and at the same instants for both points.
Robert Willis (1800-1875) has the merit of having been the first to simplify considerably the theory of pure mechanism, by pointing out that that branch of mechanics relates wholly to comparative motions.
The comparative motion of two points at a given instant is capable of being completely expressed by one of Sir William Hamilton’s Quaternions,—the “tensor” expressing the velocity ratio, and the “versor” the directional relation.
Graphical methods of analysis founded on this way of representing velocity and acceleration were developed by R. H. Smith in a paper communicated to the Royal Society of Edinburgh in 1885, and illustrations of the method will be found below.
Division 2. Motion of the Surface of a Fluid Mass.
§ 24. General Principle.—A mass of fluid is used in mechanism to transmit motion and force between two or more movable portions (called pistons or plungers) of the solid envelope or vessel in which the fluid is contained; and, when such transmission is the sole action, or the only appreciable action of the fluid mass, its volume is either absolutely constant, by reason of its temperature and pressure being maintained constant, or not sensibly varied.
Let a represent the area of the section of a piston made by a plane perpendicular to its direction of motion, and v its velocity, which is to be considered as positive when outward, and negative when inward. Then the variation of the cubic contents of the vessel in a unit of time by reason of the motion of one piston is va. The condition that the volume of the fluid mass shall remain unchanged requires that there shall be more than one piston, and that the velocities and areas of the pistons shall be connected by the equation—
Σ · va = 0.
§ 25. Comparative Motion of Two Pistons.—If there be but two pistons, whose areas are a1 and a2, and their velocities v1 and v2, their comparative motion is expressed by the equation—
v2/v1 = −a1/a2;
that is to say, their velocities are opposite as to inwardness and outwardness and inversely proportional to their areas.
§ 26. Applications: Hydraulic Press: Pneumatic Power-Transmitter.—In the hydraulic press the vessel consists of two cylinders, viz. the pump-barrel and the press-barrel, each having its piston, and of a passage connecting them having a valve opening towards the press-barrel. The action of the enclosed water in transmitting motion takes place during the inward stroke of the pump-plunger, when the above-mentioned valve is open; and at that time the press-plunger moves outwards with a velocity which is less than the inward velocity of the pump-plunger, in the same ratio that the area of the pump-plunger is less than the area of the press-plunger. (See Hydraulics.)
In the pneumatic power-transmitter the motion of one piston is 998 transmitted to another at a distance by means of a mass of air contained in two cylinders and an intervening tube. When the pressure and temperature of the air can be maintained constant, this machine fulfils equation (2), like the hydraulic press. The amount and effect of the variations of pressure and temperature undergone by the air depend on the principles of the mechanical action of heat, or Thermodynamics (q.v.), and are foreign to the subject of pure mechanism.
Division 3. Motion of a Rigid Solid.
§ 27. Motions Classed.—In problems of mechanism, each solid piece of the machine is supposed to be so stiff and strong as not to undergo any sensible change of figure or dimensions by the forces applied to it—a supposition which is realized in practice if the machine is skilfully designed.
This being the case, the various possible motions of a rigid solid body may all be classed under the following heads: (1) Shifting or Translation; (2) Turning or Rotation; (3) Motions compounded of Shifting and Turning.
The most common forms for the paths of the points of a piece of mechanism, whose motion is simple shifting, are the straight line and the circle.
Shifting in a straight line is regulated either by straight fixed guides, in contact with which the moving piece slides, or by combinations of link-work, called parallel motions, which will be described in the sequel. Shifting in a straight line is usually reciprocating; that is to say, the piece, after shifting through a certain distance, returns to its original position by reversing its motion.
Circular shifting is regulated by attaching two or more points of the shifting piece to ends of equal and parallel rotating cranks, or by combinations of wheel-work to be afterwards described. As an example of circular shifting may be cited the motion of the coupling rod, by which the parallel and equal cranks upon two or more axles of a locomotive engine are connected and made to rotate simultaneously. The coupling rod remains always parallel to itself, and all its points describe equal and similar circles relatively to the frame of the engine, and move in parallel directions with equal velocities at the same instant.
§ 28. Rotation about a Fixed Axis: Lever, Wheel and Axle.—The fixed axis of a turning body is a line fixed relatively to the body and relatively to the fixed space in which the body turns. In mechanism it is usually the central line either of a rotating shaft or axle having journals, gudgeons, or pivots turning in fixed bearings, or of a fixed spindle or dead centre round which a rotating bush turns; but it may sometimes be entirely beyond the limits of the turning body. For example, if a sliding piece moves in circular fixed guides, that piece rotates about an ideal fixed axis traversing the centre of those guides.
Let the angular velocity of the rotation be denoted by α = dθ/dt, then the linear velocity of any point A at the distance r from the axis is αr; and the path of that point is a circle of the radius r described about the axis.
This is the principle of the modification of motion by the lever, which consists of a rigid body turning about a fixed axis called a fulcrum, and having two points at the same or different distances from that axis, and in the same or different directions, one of which receives motion and the other transmits motion, modified in direction and velocity according to the above law.
In the wheel and axle, motion is received and transmitted by two cylindrical surfaces of different radii described about their common fixed axis of turning, their velocity-ratio being that of their radii.
 |
| Fig. 90. |
§ 29. Velocity Ratio of Components of Motion.—As the distance between any two points in a rigid body is invariable, the projections of their velocities upon the line joining them must be equal. Hence it follows that, if A in fig. 90 be a point in a rigid body CD, rotating round the fixed axis F, the component of the velocity of A in any direction AP parallel to the plane of rotation is equal to the total velocity of the point m, found by letting fall Fm perpendicular to AP; that is to say, is equal to
α · Fm.
Hence also the ratio of the components of the velocities of two points A and B in the directions AP and BW respectively, both in the plane of rotation, is equal to the ratio of the perpendiculars Fm and Fn.
§ 30. Instantaneous Axis of a Cylinder rolling on a Cylinder.—Let a cylinder bbb, whose axis of figure is B and angular velocity γ, roll on a fixed cylinder ααα, whose axis of figure is A, either outside (as in fig. 91), when the rolling will be towards the same hand as the rotation, or inside (as in fig. 92), when the rolling will be towards the opposite hand; and at a given instant let T be the line of contact of the two cylindrical surfaces, which is at their common intersection with the plane AB traversing the two axes of figure.
The line T on the surface bbb has for the instant no velocity in a direction perpendicular to AB; because for the instant it touches, without sliding, the line T on the fixed surface aaa.
The line T on the surface bbb has also for the instant no velocity in the plane AB; for it has just ceased to move towards the fixed surface aaa, and is just about to begin to move away from that surface.
The line of contact T, therefore, on the surface of the cylinder bbb, is for the instant at rest, and is the “instantaneous axis” about which the cylinder bbb turns, together with any body rigidly attached to that cylinder.
 | |
| Fig. 91. | Fig. 92. |
To find, then, the direction and velocity at the given instant of any point P, either in or rigidly attached to the rolling cylinder T, draw the plane PT; the direction of motion of P will be perpendicular to that plane, and towards the right or left hand according to the direction of the rotation of bbb; and the velocity of P will be
vP = γ·PT,
PT denoting the perpendicular distance of P from T. The path of P is a curve of the kind called epitrochoids. If P is in the circumference of bbb, that path becomes an epicycloid.
The velocity of any point in the axis of figure B is
vB = γ·TB;
and the path of such a point is a circle described about A with the radius AB, being for outside rolling the sum, and for inside rolling the difference, of the radii of the cylinders.
Let α denote the angular velocity with which the plane of axes AB rotates about the fixed axis A. Then it is evident that
vB = α·AB,
and consequently that
α = γ·TB/AB.
For internal rolling, as in fig. 92, AB is to be treated as negative, which will give a negative value to α, indicating that in this case the rotation of AB round A is contrary to that of the cylinder bbb.
The angular velocity of the rolling cylinder, relatively to the plane of axes AB, is obviously given by the equation—
| β = γ − α |
| whence β = γ · TA/AB |
care being taken to attend to the sign of α, so that when that is negative the arithmetical values of γ and α are to be added in order to give that of β.
The whole of the foregoing reasonings are applicable, not merely when aaa and bbb are actual cylinders, but also when they are the osculating cylinders of a pair of cylindroidal surfaces of varying curvature, A and B being the axes of curvature of the parts of those surfaces which are in contact for the instant under consideration.
 |
| Fig. 93. |
§ 31. Instantaneous Axis of a Cone rolling on a Cone.—Let Oaa (fig. 93) be a fixed cone, OA its axis, Obb a cone rolling on it, OB the axis of the rolling cone, OT the line of contact of the two cones at the instant under consideration. By reasoning similar to that of § 30, it appears that OT is the instantaneous axis of rotation of the rolling cone.
Let γ denote the total angular velocity of the rotation of the cone B about the instantaneous axis, β its angular velocity about the axis OB relatively to the plane AOB, and α the angular velocity with which the plane AOB turns round the axis OA. It is required to find the ratios of those angular velocities.
Solution.—In OT take any point E, from which draw EC parallel to OA, and ED parallel to OB, so as to construct the parallelogram OCED. Then
OD : OC : OE :: α : β : γ.
Or because of the proportionality of the sides of triangles to the sines of the opposite angles,
sin TOB : sin TOA : sin AOB :: α : β : γ,
that is to say, the angular velocity about each axis is proportional to the sine of the angle between the other two.
Demonstration.—From C draw CF perpendicular to OA, and CG perpendicular to OE
| Then CF = 2 × | area EC | , |
| CE |
| and CG = 2 × | area ECO | ; |
| OE |
∴ CG : CF :: CE = OD : OE.
Let vc denote the linear velocity of the point C. Then
vc = α · CF = γ · CG
∴ γ : α :: CF : CG :: OE : OD,
which is one part of the solution above stated. From E draw EH perpendicular to OB, and EK to OA. Then it can be shown as before that
EK : EH :: OC : OD.
Let vE be the linear velocity of the point E fixed in the plane of axes AOB. Then
vK = α · EK.
Now, as the line of contact OT is for the instant at rest on the rolling cone as well as on the fixed cone, the linear velocity of the point E fixed to the plane AOB relatively to the rolling cone is the same with its velocity relatively to the fixed cone. That is to say,
β · EH = vE = α · EK;
therefore
α : β :: EH : EK :: OD : OC,
which is the remainder of the solution.
The path of a point P in or attached to the rolling cone is a spherical epitrochoid traced on the surface of a sphere of the radius OP. From P draw PQ perpendicular to the instantaneous axis. Then the motion of P is perpendicular to the plane OPQ, and its velocity is
vP = γ · PQ.
The whole of the foregoing reasonings are applicable, not merely when A and B are actual regular cones, but also when they are the osculating regular cones of a pair of irregular conical surfaces, having a common apex at O.
§ 32. Screw-like or Helical Motion.—Since any displacement in a plane can be represented in general by a rotation, it follows that the only combination of translation and rotation, in which a complex movement which is not a mere rotation is produced, occurs when there is a translation perpendicular to the plane and parallel to the axis of rotation.
 |
| Fig. 94. |
Such a complex motion is called screw-like or helical motion; for each point in the body describes a helix or screw round the axis of rotation, fixed or instantaneous as the case may be. To cause a body to move in this manner it is usually made of a helical or screw-like figure, and moves in a guide of a corresponding figure. Helical motion and screws adapted to it are said to be right- or left-handed according to the appearance presented by the rotation to an observer looking towards the direction of the translation. Thus the screw G in fig. 94 is right-handed.
The translation of a body in helical motion is called its advance. Let vx denote the velocity of advance at a given instant, which of course is common to all the particles of the body; α the angular velocity of the rotation at the same instant; 2π = 6.2832 nearly, the circumference of a circle of the radius unity. Then
T = 2π/α
is the time of one turn at the rate α; and
p = vxT = 2πvx/α
is the pitch or advance per turn—a length which expresses the comparative motion of the translation and the rotation.
The pitch of a screw is the distance, measured parallel to its axis, between two successive turns of the same thread or helical projection.
Let r denote the perpendicular distance of a point in a body moving helically from the axis. Then
vr = αr
is the component of the velocity of that point in a plane perpendicular to the axis, and its total velocity is
v = √ {vx2 + vr2}.
The ratio of the two components of that velocity is
vx/vr = p/2πr = tan θ.
where θ denotes the angle made by the helical path of the point with a plane perpendicular to the axis.
Division 4. Elementary Combinations in Mechanism
§ 33. Definitions.—An elementary combination in mechanism consists of two pieces whose kinds of motion are determined by their connexion with the frame, and their comparative motion by their connexion with each other—that connexion being effected either by direct contact of the pieces, or by a connecting piece, which is not connected with the frame, and whose motion depends entirely on the motions of the pieces which it connects.
The piece whose motion is the cause is called the driver; the piece whose motion is the effect, the follower.
The connexion of each of those two pieces with the frame is in general such as to determine the path of every point in it. In the investigation, therefore, of the comparative motion of the driver and follower, in an elementary combination, it is unnecessary to consider relations of angular direction, which are already fixed by the connexion of each piece with the frame; so that the inquiry is confined to the determination of the velocity ratio, and of the directional relation, so far only as it expresses the connexion between forward and backward movements of the driver and follower. When a continuous motion of the driver produces a continuous motion of the follower, forward or backward, and a reciprocating motion a motion reciprocating at the same instant, the directional relation is said to be constant. When a continuous motion produces a reciprocating motion, or vice versa, or when a reciprocating motion produces a motion not reciprocating at the same instant, the directional relation is said to be variable.
The line of action or of connexion of the driver and follower is a line traversing a pair of points in the driver and follower respectively, which are so connected that the component of their velocity relatively to each other, resolved along the line of connexion, is null. There may be several or an indefinite number of lines of connexion, or there may be but one; and a line of connexion may connect either the same pair of points or a succession of different pairs.
§ 34. General Principle.—From the definition of a line of connexion it follows that the components of the velocities of a pair of connected points along their line of connexion are equal. And from this, and from the property of a rigid body, already stated in § 29, it follows, that the components along a line of connexion of all the points traversed by that line, whether in the driver or in the follower, are equal; and consequently, that the velocities of any pair of points traversed by a line of connexion are to each other inversely as the cosines, or directly as the secants, of the angles made by the paths of those points with the line of connexion.
The general principle stated above in different forms serves to solve every problem in which—the mode of connexion of a pair of pieces being given—it is required to find their comparative motion at a given instant, or vice versa.
 |
| Fig. 95. |
§ 35. Application to a Pair of Shifting Pieces.—In fig. 95, let P1P2 be the line of connexion of a pair of pieces, each of which has a motion of translation or shifting. Through any point T in that line draw TV1, TV2, respectively parallel to the simultaneous direction of motion of the pieces; through any other point A in the line of connexion draw a plane perpendicular to that line, cutting TV1, TV2 in V1, V2; then, velocity of piece 1 : velocity of piece 2 :: TV1 : TV2. Also TA represents the equal components of the velocities of the pieces parallel to their line of connexion, and the line V1V2 represents their velocity relatively to each other.
§ 36. Application to a Pair of Turning Pieces.—Let α1, α2 be the angular velocities of a pair of turning pieces; θ1, θ2 the angles which their line of connexion makes with their respective planes of rotation; r1, r2 the common perpendiculars let fall from the line of connexion upon the respective axes of rotation of the pieces. Then the equal components, along the line of connexion, of the velocities of the points where those perpendiculars meet that line are—
α1r1 cos θ1 = α2r2 cos θ2;
consequently, the comparative motion of the pieces is given by the equation
| α2 | = | r1 cos θ1 | . |
| α1 | r2 cos θ2 |
§ 37. Application to a Shifting Piece and a Turning Piece.—Let a shifting piece be connected with a turning piece, and at a given instant let α1 be the angular velocity of the turning piece, r1 the common perpendicular of its axis of rotation and the line of connexion, θ1 the angle made by the line of connexion with the plane of rotation, θ2 the angle made by the line of connexion with the direction of motion of the shifting piece, v2 the linear velocity of that piece. Then
α1r1 cos θ1 = v2 cos θ2;
which equation expresses the comparative motion of the two pieces.
§ 38. Classification of Elementary Combinations in Mechanism.—The first systematic classification of elementary combinations in mechanism was that founded by Monge, and fully developed by Lanz and Bétancourt, which has been generally received, and has been adopted in most treatises on applied mechanics. But that classification is founded on the absolute instead of the comparative 1000 motions of the pieces, and is, for that reason, defective, as Willis pointed out in his admirable treatise On the Principles of Mechanism.
Willis’s classification is founded, in the first place, on comparative motion, as expressed by velocity ratio and directional relation, and in the second place, on the mode of connexion of the driver and follower. He divides the elementary combinations in mechanism into three classes, of which the characters are as follows:—
Class A: Directional relation constant; velocity ratio constant.
Class B: Directional relation constant; velocity ratio varying.
Class C: Directional relation changing periodically; velocity ratio constant or varying.
Each of those classes is subdivided by Willis into five divisions, of which the characters are as follows:—
| Division | A: | Connexion | by | rolling contact. |
| ” | B: | ” | ” | sliding contact. |
| ” | C: | ” | ” | wrapping connectors. |
| ” | D: | ” | ” | link-work. |
| ” | E: | ” | ” | reduplication. |
In the Reuleaux system of analysis of mechanisms the principle of comparative motion is generalized, and mechanisms apparently very diverse in character are shown to be founded on the same sequence of elementary combinations forming a kinematic chain. A short description of this system is given in § 80, but in the present article the principle of Willis’s classification is followed mainly. The arrangement is, however, modified by taking the mode of connexion as the basis of the primary classification, and by removing the subject of connexion by reduplication to the section of aggregate combinations. This modified arrangement is adopted as being better suited than the original arrangement to the limits of an article in an encyclopaedia; but it is not disputed that the original arrangement may be the best for a separate treatise.
§ 39. Rolling Contact: Smooth Wheels and Racks.—In order that two pieces may move in rolling contact, it is necessary that each pair of points in the two pieces which touch each other should at the instant of contact be moving in the same direction with the same velocity. In the case of two shifting pieces this would involve equal and parallel velocities for all the points of each piece, so that there could be no rolling, and, in fact, the two pieces would move like one; hence, in the case of rolling contact, either one or both of the pieces must rotate.
The direction of motion of a point in a turning piece being perpendicular to a plane passing through its axis, the condition that each pair of points in contact with each other must move in the same direction leads to the following consequences:—
I. That, when both pieces rotate, their axes, and all their points of contact, lie in the same plane.
II. That, when one piece rotates, and the other shifts, the axis of the rotating piece, and all the points of contact, lie in a plane perpendicular to the direction of motion of the shifting piece.
The condition that the velocity of each pair of points of contact must be equal leads to the following consequences:—
III. That the angular velocities of a pair of turning pieces in rolling contact must be inversely as the perpendicular distances of any pair of points of contact from the respective axes.
IV. That the linear velocity of a shifting piece in rolling contact with a turning piece is equal to the product of the angular velocity of the turning piece by the perpendicular distance from its axis to a pair of points of contact.
The line of contact is that line in which the points of contact are all situated. Respecting this line, the above Principles III. and IV. lead to the following conclusions:—
V. That for a pair of turning pieces with parallel axes, and for a turning piece and a shifting piece, the line of contact is straight, and parallel to the axes or axis; and hence that the rolling surfaces are either plane or cylindrical (the term “cylindrical” including all surfaces generated by the motion of a straight line parallel to itself).
VI. That for a pair of turning pieces with intersecting axes the line of contact is also straight, and traverses the point of intersection of the axes; and hence that the rolling surfaces are conical, with a common apex (the term “conical” including all surfaces generated by the motion of a straight line which traverses a fixed point).
Turning pieces in rolling contact are called smooth or toothless wheels. Shifting pieces in rolling contact with turning pieces may be called smooth or toothless racks.
VII. In a pair of pieces in rolling contact every straight line traversing the line of contact is a line of connexion.
§ 40. Cylindrical Wheels and Smooth Racks.—In designing cylindrical wheels and smooth racks, and determining their comparative motion, it is sufficient to consider a section of the pair of pieces made by a plane perpendicular to the axis or axes.
The points where axes intersect the plane of section are called centres; the point where the line of contact intersects it, the point of contact, or pitch-point; and the wheels are described as circular, elliptical, &c., according to the forms of their sections made by that plane.
When the point of contact of two wheels lies between their centres, they are said to be in outside gearing; when beyond their centres, in inside gearing, because the rolling surface of the larger wheel must in this case be turned inward or towards its centre.
From Principle III. of § 39 it appears that the angular velocity-ratio of a pair of wheels is the inverse ratio of the distances of the point of contact from the centres respectively.
 |
| Fig. 96. |
For outside gearing that ratio is negative, because the wheels turn contrary ways; for inside gearing it is positive, because they turn the same way.
If the velocity ratio is to be constant, as in Willis’s Class A, the wheels must be circular; and this is the most common form for wheels.
If the velocity ratio is to be variable, as in Willis’s Class B, the figures of the wheels are a pair of rolling curves, subject to the condition that the distance between their poles (which are the centres of rotation) shall be constant.
The following is the geometrical relation which must exist between such a pair of curves:—
Let C1, C2 (fig. 96) be the poles of a pair of rolling curves; T1, T2 any pair of points of contact; U1, U2 any other pair of points of contact. Then, for every possible pair of points of contact, the two following equations must be simultaneously fulfilled:—
Sum of radii, C1U1 + C2U2 = C1T1 + C2T2 = constant;
arc, T2U2 = T1U1.
A condition equivalent to the above, and necessarily connected with it, is, that at each pair of points of contact the inclinations of the curves to their radii-vectores shall be equal and contrary; or, denoting by r1, r2 the radii-vectores at any given pair of points of contact, and s the length of the equal arcs measured from a certain fixed pair of points of contact—
dr2/ds = −dr1/ds;
which is the differential equation of a pair of rolling curves whose poles are at a constant distance apart.
For full details as to rolling curves, see Willis’s work, already mentioned, and Clerk Maxwell’s paper on Rolling Curves, Trans. Roy. Soc. Edin., 1849.
A rack, to work with a circular wheel, must be straight. To work with a wheel of any other figure, its section must be a rolling curve, subject to the condition that the perpendicular distance from the pole or centre of the wheel to a straight line parallel to the direction of the motion of the rack shall be constant. Let r1 be the radius-vector of a point of contact on the wheel, x2 the ordinate from the straight line before mentioned to the corresponding point of contact on the rack. Then
dx2/ds = −dr1/ds
is the differential equation of the pair of rolling curves.
To illustrate this subject, it may be mentioned that an ellipse rotating about one focus rolls completely round in outside gearing with an equal and similar ellipse also rotating about one focus, the distance between the axes of rotation being equal to the major axis of the ellipses, and the velocity ratio varying from (1 + eccentricity)/(1 − eccentricity) to (1 − eccentricity)/(1 + eccentricity); an hyperbola rotating about its further focus rolls in inside gearing, through a limited arc, with an equal and similar hyperbola rotating about its nearer focus, the distance between the axes of rotation being equal to the axis of the hyperbolas, and the velocity ratio varying between (eccentricity + 1)/(eccentricity − 1) and unity; and a parabola rotating about its focus rolls with an equal and similar parabola, shifting parallel to its directrix.
 |
| Fig. 97. |
§ 41. Conical or Bevel and Disk Wheels.—From Principles III. and VI. of § 39 it appears that the angular velocities of a pair of wheels whose axes meet in a point are to each other inversely as the sines of the angles which the axes of the wheels make with the line of contact. Hence we have the following construction (figs. 97 and 98).—Let O be the apex or point of intersection of the two axes OC1, OC2. The angular velocity ratio being given, it is required to find the line of contact. On OC1, OC2 take lengths OA1, OA2, respectively proportional to the angular velocities of the pieces on whose axes they are taken. Complete the parallelogram OA1EA2; the diagonal OET will be the line of contact required.
When the velocity ratio is variable, the line of contact will shift its position in the plane C1OC2, and the wheels will be cones, with eccentric or irregular bases. In every case which occurs in practice, however, the velocity ratio is constant; the line of contact is constant in position, and the rolling surfaces of the wheels are regular circular cones (when they are called bevel wheels); or one of a pair of wheels may have a flat disk 1001 for its rolling surface, as W2 in fig. 98, in which case it is a disk wheel. The rolling surfaces of actual wheels consist of frusta or zones of the complete cones or disks, as shown by W1, W2 in figs. 97 and 98.
 |
| Fig. 98. |
 |
| Fig. 99. |
 |
| Fig. 100. |
§ 42. Sliding Contact (lateral): Skew-Bevel Wheels.—An hyperboloid of revolution is a surface resembling a sheaf or a dice box, generated by the rotation of a straight line round an axis from which it is at a constant distance, and to which it is inclined at a constant angle. If two such hyperboloids E, F, equal or unequal, be placed in the closest possible contact, as in fig. 99, they will touch each other along one of the generating straight lines of each, which will form their line of contact, and will be inclined to the axes AG, BH in opposite directions. The axes will not be parallel, nor will they intersect each other.
The motion of two such hyperboloids, turning in contact with each other, has hitherto been classed amongst cases of rolling contact; but that classification is not strictly correct, for, although the component velocities of a pair of points of contact in a direction at right angles to the line of contact are equal, still, as the axes are parallel neither to each other nor to the line of contact, the velocities of a pair of points of contact have components along the line of contact which are unequal, and their difference constitutes a lateral sliding.
The directions and positions of the axes being given, and the required angular velocity ratio, the following construction serves to determine the line of contact, by whose rotation round the two axes respectively the hyperboloids are generated:—
In fig. 100, let B1C1, B2C2 be the two axes; B1B2 their common perpendicular. Through any point O in this common perpendicular draw OA1 parallel to B1C1 and OA2 parallel to B2C2; make those lines proportional to the angular velocities about the axes to which they are respectively parallel; complete the parallelogram OA1EA2, and draw the diagonal OE; divide B1B2 in D into two parts, inversely proportional to the angular velocities about the axes which they respectively adjoin; through D parallel to OE draw DT. This will be the line of contact.
A pair of thin frusta of a pair of hyperboloids are used in practice to communicate motion between a pair of axes neither parallel nor intersecting, and are called skew-bevel wheels.
In skew-bevel wheels the properties of a line of connexion are not possessed by every line traversing the line of contact, but only by every line traversing the line of contact at right angles.
If the velocity ratio to be communicated were variable, the point D would alter its position, and the line DT its direction, at different periods of the motion, and the wheels would be hyperboloids of an eccentric or irregular cross-section; but forms of this kind are not used in practice.
§ 43. Sliding Contact (circular): Grooved Wheels.—As the adhesion or friction between a pair of smooth wheels is seldom sufficient to prevent their slipping on each other, contrivances are used to increase their mutual hold. One of those consists in forming the rim of each wheel into a series of alternate ridges and grooves parallel to the plane of rotation; it is applicable to cylindrical and bevel wheels, but not to skew-bevel wheels. The comparative motion of a pair of wheels so ridged and grooved is the same as that of a pair of smooth wheels in rolling contact, whose cylindrical or conical surfaces lie midway between the tops of the ridges and bottoms of the grooves, and those ideal smooth surfaces are called the pitch surfaces of the wheels.
The relative motion of the faces of contact of the ridges and grooves is a rotatory sliding or grinding motion, about the line of contact of the pitch-surfaces as an instantaneous axis.
Grooved wheels have hitherto been but little used.
§ 44. Sliding Contact (direct): Teeth of Wheels, their Number and Pitch.—The ordinary method of connecting a pair of wheels, or a wheel and a rack, and the only method which ensures the exact maintenance of a given numerical velocity ratio, is by means of a series of alternate ridges and hollows parallel or nearly parallel to the successive lines of contact of the ideal smooth wheels whose velocity ratio would be the same with that of the toothed wheels. The ridges are called teeth; the hollows, spaces. The teeth of the driver push those of the follower before them, and in so doing sliding takes place between them in a direction across their lines of contact.
The pitch-surfaces of a pair of toothed wheels are the ideal smooth surfaces which would have the same comparative motion by rolling contact that the actual wheels have by the sliding contact of their teeth. The pitch-circles of a pair of circular toothed wheels are sections of their pitch-surfaces, made for spur-wheels (that is, for wheels whose axes are parallel) by a plane at right angles to the axes, and for bevel wheels by a sphere described about the common apex. For a pair of skew-bevel wheels the pitch-circles are a pair of contiguous rectangular sections of the pitch-surfaces. The pitch-point is the point of contact of the pitch-circles.
The pitch-surface of a wheel lies intermediate between the points of the teeth and the bottoms of the hollows between them. That part of the acting surface of a tooth which projects beyond the pitch-surface is called the face; that part which lies within the pitch-surface, the flank.
Teeth, when not otherwise specified, are understood to be made in one piece with the wheel, the material being generally cast-iron, brass or bronze. Separate teeth, fixed into mortises in the rim of the wheel, are called cogs. A pinion is a small toothed wheel; a trundle is a pinion with cylindrical staves for teeth.
The radius of the pitch-circle of a wheel is called the geometrical radius; a circle touching the ends of the teeth is called the addendum circle, and its radius the real radius; the difference between these radii, being the projection of the teeth beyond the pitch-surface, is called the addendum.
The distance, measured along the pitch-circle, from the face of one tooth to the face of the next, is called the pitch. The pitch and the number of teeth in wheels are regulated by the following principles:—
I. In wheels which rotate continuously for one revolution or more, it is obviously necessary that the pitch should be an aliquot part of the circumference.
In wheels which reciprocate without performing a complete revolution this condition is not necessary. Such wheels are called sectors.
II. In order that a pair of wheels, or a wheel and a rack, may work correctly together, it is in all cases essential that the pitch should be the same in each.
III. Hence, in any pair of circular wheels which work together, the numbers of teeth in a complete circumference are directly as the radii and inversely as the angular velocities.
IV. Hence also, in any pair of circular wheels which rotate continuously for one revolution or more, the ratio of the numbers of teeth and its reciprocal the angular velocity ratio must be expressible in whole numbers.
From this principle arise problems of a kind which will be referred to in treating of Trains of Mechanism.
V. Let n, N be the respective numbers of teeth in a pair of wheels, N being the greater. Let t, T be a pair of teeth in the smaller and larger wheel respectively, which at a particular instant work together. It is required to find, first, how many pairs of teeth must pass the line of contact of the pitch-surfaces before t and T work together again (let this number be called a); and, secondly, with how many different teeth of the larger wheel the tooth t will work at different times (let this number be called b); thirdly, with how many different teeth of the smaller wheel the tooth T will work at different times (let this be called c).
Case 1. If n is a divisor of N,
a = N; b = N/n; c = 1.
Case 2. If the greatest common divisor of N and n be d, a number less than n, so that n = md, N = Md; then
a = mN = Mn = Mmd; b = M; c = m.
Case 3. If N and n be prime to each other,
a = nN; b = N; c = n.
It is considered desirable by millwrights, with a view to the preservation of the uniformity of shape of the teeth of a pair of wheels, that each given tooth in one wheel should work with as many different teeth in the other wheel as possible. They therefore study that the numbers of teeth in each pair of wheels which work together shall either be prime to each other, or shall have their greatest common divisor as small as is consistent with a velocity ratio suited for the purposes of the machine.
§ 45. Sliding Contact: Forms of the Teeth of Spur-wheels and Racks.—A line of connexion of two pieces in sliding contact is a line perpendicular to their surfaces at a point where they touch. Bearing this in mind, the principle of the comparative motion of a pair of teeth belonging to a pair of spur-wheels, or to a spur-wheel and a rack, is found by applying the principles stated generally in §§ 36 and 37 to the case of parallel axes for a pair of spur-wheels, and to the case of an axis perpendicular to the direction of shifting for a wheel and a rack.
In fig. 101, let C1, C2 be the centres of a pair of spur-wheels; B1IB1′, B2IB2′ portions of their pitch-circles, touching at I, the pitch-point. Let the wheel 1 be the driver, and the wheel 2 the follower.
 |
| Fig. 101. |
Let D1TB1A1, D2TB2A2 be the positions, at a given instant, of the acting surfaces of a pair of teeth in the driver and follower respectively, touching each other at T; the line of connexion of those teeth is P1P2, perpendicular to their surfaces at T. Let C1P1, C2P2 be perpendiculars let fall from the centres of the wheels on the line of contact. Then, by § 36, the angular velocity-ratio is
α2/α1 = C1P1/C2P2.
The following principles regulate the forms of the teeth and their relative motions:—
I. The angular velocity ratio due to the sliding contact of the teeth will be the same with that due to the rolling contact of the pitch-circles, if the line of connexion of the teeth cuts the line of centres at the pitch-point.
For, let P1P2 cut the line of centres at I; then, by similar triangles,
α1 : α2 :: C2P2 : C1P1 :: IC2 :: IC1;
which is also the angular velocity ratio due to the rolling contact of the circles B1IB1′, B2IB2′.
This principle determines the forms of all teeth of spur-wheels. It also determines the forms of the teeth of straight racks, if one of the centres be removed, and a straight line EIE′, parallel to the direction of motion of the rack, and perpendicular to C1IC2, be substituted for a pitch-circle.
II. The component of the velocity of the point of contact of the teeth T along the line of connexion is
α1 · C1P1 = α2 · C2P2.
III. The relative velocity perpendicular to P1P2 of the teeth at their point of contact—that is, their velocity of sliding on each other—is found by supposing one of the wheels, such as 1, to be fixed, the line of centres C1C2 to rotate backwards round C1 with the angular velocity α1, and the wheel 2 to rotate round C2 as before, with the angular velocity α2 relatively to the line of centres C1C2, so as to have the same motion as if its pitch-circle rolled on the pitch-circle of the first wheel. Thus the relative motion of the wheels is unchanged; but 1 is considered as fixed, and 2 has the total motion, that is, a rotation about the instantaneous axis I, with the angular velocity α1 + α2. Hence the velocity of sliding is that due to this rotation about I, with the radius IT; that is to say, its value is
(α1 + α2) · IT;
so that it is greater the farther the point of contact is from the line of centres; and at the instant when that point passes the line of centres, and coincides with the pitch-point, the velocity of sliding is null, and the action of the teeth is, for the instant, that of rolling contact.
IV. The path of contact is the line traversing the various positions of the point T. If the line of connexion preserves always the same position, the path of contact coincides with it, and is straight; in other cases the path of contact is curved.
It is divided by the pitch-point I into two parts—the arc or line of approach described by T in approaching the line of centres, and the arc or line of recess described by T after having passed the line of centres.
During the approach, the flank D1B1 of the driving tooth drives the face D2B2 of the following tooth, and the teeth are sliding towards each other. During the recess (in which the position of the teeth is exemplified in the figure by curves marked with accented letters), the face B1′A1′ of the driving tooth drives the flank B2′A2′ of the following tooth, and the teeth are sliding from each other.
The path of contact is bounded where the approach commences by the addendum-circle of the follower, and where the recess terminates by the addendum-circle of the driver. The length of the path of contact should be such that there shall always be at least one pair of teeth in contact; and it is better still to make it so long that there shall always be at least two pairs of teeth in contact.
V. The obliquity of the action of the teeth is the angle EIT = IC1, P1 = IC2P2.
In practice it is found desirable that the mean value of the obliquity of action during the contact of teeth should not exceed 15°, nor the maximum value 30°.
It is unnecessary to give separate figures and demonstrations for inside gearing. The only modification required in the formulae is, that in equation (26) the difference of the angular velocities should be substituted for their sum.
§ 46. Involute Teeth.—The simplest form of tooth which fulfils the conditions of § 45 is obtained in the following manner (see fig. 102). Let C1, C2 be the centres of two wheels, B1IB1′, B2IB2′ their pitch-circles, I the pitch-point; let the obliquity of action of the teeth be constant, so that the same straight line P1IP2 shall represent at once the constant line of connexion of teeth and the path of contact. Draw C1P1, C2P2 perpendicular to P1IP2, and with those lines as radii describe about the centres of the wheels the circles D1D1′, D2D2′, called base-circles. It is evident that the radii of the base-circles bear to each other the same proportions as the radii of the pitch-circles, and also that
C1P1 = IC1 · cos obliquity
C2P2 = IC2 · cos obliquity.
(The obliquity which is found to answer best in practice is about 141⁄2°; its cosine is about 31/22, and its sine about 1⁄4. These values though not absolutely exact, are near enough to the truth for practical purposes.)
 |
| Fig. 102. |
Suppose the base-circles to be a pair of circular pulleys connected by means of a cord whose course from pulley to pulley is P1IP2. As the line of connexion of those pulleys is the same as that of the proposed teeth, they will rotate with the required velocity ratio. Now, suppose a tracing point T to be fixed to the cord, so as to be carried along the path of contact P1IP2, that point will trace on a plane rotating along with the wheel 1 part of the involute of the base-circle D1D1′, and on a plane rotating along with the wheel 2 part of the involute of the base-circle D2D2′; and the two curves so traced will always touch each other in the required point of contact T, and will therefore fulfil the condition required by Principle I. of § 45.
Consequently, one of the forms suitable for the teeth of wheels is the involute of a circle; and the obliquity of the action of such teeth is the angle whose cosine is the ratio of the radius of their base-circle to that of the pitch-circle of the wheel.
All involute teeth of the same pitch work smoothly together.
To find the length of the path of contact on either side of the pitch-point I, it is to be observed that the distance between the fronts of two successive teeth, as measured along P1IP2, is less than the pitch in the ratio of cos obliquity : I; and consequently that, if distances equal to the pitch be marked off either way from I towards P1 and P2 respectively, as the extremities of the path of contact, and if, according to Principle IV. of § 45, the addendum-circles be described through the points so found, there will always be at least two pairs of teeth in action at once. In practice it is usual to make the path of contact somewhat longer, viz. about 2.4 times the pitch; and with this length of path, and the obliquity already mentioned of 141⁄2°, the addendum is about 3.1 of the pitch.
The teeth of a rack, to work correctly with wheels having involute teeth, should have plane surfaces perpendicular to the line of connexion, and consequently making with the direction of motion of the rack angles equal to the complement of the obliquity of action.
§ 47. Teeth for a given Path of Contact: Sang’s Method.—In the preceding section the form of the teeth is found by assuming a figure for the path of contact, viz. the straight line. Any other convenient figure may be assumed for the path of contact, and the corresponding forms of the teeth found by determining what curves a point T, moving along the assumed path of contact, will trace on two disks rotating round the centres of the wheels with angular velocities bearing that relation to the component velocity of T along TI, which is given by Principle II. of § 45, and by equation (25). This method of finding the forms of the teeth of wheels forms the subject of an elaborate and most interesting treatise by Edward Sang.
All wheels having teeth of the same pitch, traced from the same path of contact, work correctly together, and are said to belong to the same set.
 |
| Fig. 103. |
§ 48. Teeth traced by Rolling Curves.—If any curve R (fig. 103) be rolled on the inside of the pitch-circle BB of a wheel, it appears, from § 30, that the instantaneous axis of the rolling curve at any instant will be at the point I, where it touches the pitch-circle for the moment, and that consequently the line AT, traced by a tracing-point T, fixed to the rolling curve upon the plane of the wheel, will be everywhere perpendicular to the straight line TI; so that the traced curve AT will be suitable for the flank of a tooth, in which T is the point of contact corresponding to the position I of the pitch-point. If the 1003 same rolling curve R, with the same tracing-point T, be rolled on the outside of any other pitch-circle, it will have the face of a tooth suitable to work with the flank AT.
In like manner, if either the same or any other rolling curve R′ be rolled the opposite way, on the outside of the pitch-circle BB, so that the tracing point T′ shall start from A, it will trace the face AT′ of a tooth suitable to work with a flank traced by rolling the same curve R′ with the same tracing-point T′ inside any other pitch-circle.
The figure of the path of contact is that traced on a fixed plane by the tracing-point, when the rolling curve is rotated in such a manner as always to touch a fixed straight line EIE (or E′I′E′, as the case may be) at a fixed point I (or I′).
If the same rolling curve and tracing-point be used to trace both the faces and the flanks of the teeth of a number of wheels of different sizes but of the same pitch, all those wheels will work correctly together, and will form a set. The teeth of a rack, of the same set, are traced by rolling the rolling curve on both sides of a straight line.
The teeth of wheels of any figure, as well as of circular wheels, may be traced by rolling curves on their pitch-surfaces; and all teeth of the same pitch, traced by the same rolling curve with the same tracing-point, will work together correctly if their pitch-surfaces are in rolling contact.
 |
| Fig. 104. |
§ 49. Epicycloidal Teeth.—The most convenient rolling curve is the circle. The path of contact which it traces is identical with itself; and the flanks of the teeth are internal and their faces external epicycloids for wheels, and both flanks and faces are cycloids for a rack.
For a pitch-circle of twice the radius of the rolling or describing circle (as it is called) the internal epicycloid is a straight line, being, in fact, a diameter of the pitch-circle, so that the flanks of the teeth for such a pitch-circle are planes radiating from the axis. For a smaller pitch-circle the flanks would be convex and in-curved or under-cut, which would be inconvenient; therefore the smallest wheel of a set should have its pitch-circle of twice the radius of the describing circle, so that the flanks may be either straight or concave.
In fig. 104 let BB′ be part of the pitch-circle of a wheel with epicycloidal teeth; CIC′ the line of centres; I the pitch-point; EIE′ a straight tangent to the pitch-circle at that point; R the internal and R′ the equal external describing circles, so placed as to touch the pitch-circle and each other at I. Let DID′ be the path of contact, consisting of the arc of approach DI and the arc of recess ID′. In order that there may always be at least two pairs of teeth in action, each of those arcs should be equal to the pitch.
The obliquity of the action in passing the line of centres is nothing; the maximum obliquity is the angle EID = E′ID; and the mean obliquity is one-half of that angle.
It appears from experience that the mean obliquity should not exceed 15°; therefore the maximum obliquity should be about 30°; therefore the equal arcs DI and ID′ should each be one-sixth of a circumference; therefore the circumference of the describing circle should be six times the pitch.
It follows that the smallest pinion of a set in which pinion the flanks are straight should have twelve teeth.
§ 50. Nearly Epicycloidal Teeth: Willis’s Method.—To facilitate the drawing of epicycloidal teeth in practice, Willis showed how to approximate to their figure by means of two circular arcs—one concave, for the flank, and the other convex, for the face—and each having for its radius the mean radius of curvature of the epicycloidal arc. Willis’s formulae are founded on the following properties of epicycloids:—
Let R be the radius of the pitch-circle; r that of the describing circle; θ the angle made by the normal TI to the epicycloid at a given point T, with a tangent to the circle at I—that is, the obliquity of the action at T.
Then the radius of curvature of the epicycloid at T is—
| For an internal epicycloid, ρ = 4r sin θ | R − r |
| R − 2r |
| For an external epicycloid, ρ′ = 4r sin θ | R + r |
| R + 2r |
Also, to find the position of the centres of curvature relatively to the pitch-circle, we have, denoting the chord of the describing circle TI by c, c = 2r sin θ; and therefore
| For the flank, ρ − c = 2r sin θ | R |
| R − 2r |
| For the face, ρ′ − c = 2r sin θ | R |
| R + 2r |
For the proportions approved of by Willis, sin θ = 1⁄4 nearly; r = p (the pitch) nearly; c = 1⁄2p nearly; and, if N be the number of teeth in the wheel, r/R = 6/N nearly; therefore, approximately,
| ρ − c = | p | · | N |
| 2 | N − 12 |
| ρ − c = | p | · | N |
| 2 | N + 12 |
 |
| Fig. 105. |
Hence the following construction (fig. 105). Let BB be part of the pitch-circle, and a the point where a tooth is to cross it. Set off ab = ac − 1⁄2p. Draw radii bd, ce; draw fb, cg, making angles of 751⁄2° with those radii. Make bf = p′ − c, cg = p − c. From f, with the radius fa, draw the circular arc ah; from g, with the radius ga, draw the circular arc ak. Then ah is the face and ak the flank of the tooth required.
To facilitate the application of this rule, Willis published tables of ρ − c and ρ′ − c, and invented an instrument called the “odontograph.”
§ 51. Trundles and Pin-Wheels.—If a wheel or trundle have cylindrical pins or staves for teeth, the faces of the teeth of a wheel suitable for driving it are described by first tracing external epicycloids, by rolling the pitch-circle of the pin-wheel or trundle on the pitch-circle of the driving-wheel, with the centre of a stave for a tracing-point, and then drawing curves parallel to, and within the epicycloids, at a distance from them equal to the radius of a stave. Trundles having only six staves will work with large wheels.
§ 52. Backs of Teeth and Spaces.—Toothed wheels being in general intended to rotate either way, the backs of the teeth are made similar to the fronts. The space between two teeth, measured on the pitch-circle, is made about 1⁄6th part wider than the thickness of the tooth on the pitch-circle—that is to say,
| Thickness of tooth | = 5⁄11 pitch; |
| Width of space | = 6⁄11 pitch. |
The difference of 1⁄11 of the pitch is called the back-lash. The clearance allowed between the points of teeth and the bottoms of the spaces between the teeth of the other wheel is about one-tenth of the pitch.
§ 53. Stepped and Helical Teeth.—R. J. Hooke invented the making of the fronts of teeth in a series of steps with a view to increase the smoothness of action. A wheel thus formed resembles in shape a series of equal and similar toothed disks placed side by side, with the teeth of each a little behind those of the preceding disk. He also invented, with the same object, teeth whose fronts, instead of being parallel to the line of contact of the pitch-circles, cross it obliquely, so as to be of a screw-like or helical form. In wheel-work of this kind the contact of each pair of teeth commences at the foremost end of the helical front, and terminates at the aftermost end; and the helix is of such a pitch that the contact of one pair of teeth shall not terminate until that of the next pair has commenced.
Stepped and helical teeth have the desired effect of increasing the smoothness of motion, but they require more difficult and expensive workmanship than common teeth; and helical teeth are, besides, open to the objection that they exert a laterally oblique pressure, which tends to increase resistance, and unduly strain the machinery.
§ 54. Teeth of Bevel-Wheels.—The acting surfaces of the teeth of bevel-wheels are of the conical kind, generated by the motion of a line passing through the common apex of the pitch-cones, while its extremity is carried round the outlines of the cross section of the teeth made by a sphere described about that apex.
 |
| Fig. 106. |
The operations of describing the exact figures of the teeth of bevel-wheels, whether by involutes or by rolling curves, are in every respect analogous to those for describing the figures of the teeth of spur-wheels, except that in the case of bevel-wheels all those operations are to be performed on the surface of a sphere described about the apex instead of on a plane, substituting poles for centres, and great circles for straight lines.
In consideration of the practical difficulty, especially in the case of large wheels, of obtaining an accurate spherical surface, and of drawing upon it when obtained, the following approximate method, proposed originally by Tredgold, is generally used:—
Let O (fig. 106) be the common apex of a pair of bevel-wheels; OB1I, OB2I their pitch cones; OC1, OC2 their axes; OI their line of contact. Perpendicular to OI draw A1IA2, cutting the axes in A1, A2; make the outer rims of the patterns and of the wheels 1004 portions of the cones A1B1I, A2B2I, of which the narrow zones occupied by the teeth will be sufficiently near to a spherical surface described about O for practical purposes. To find the figures of the teeth, draw on a flat surface circular arcs ID1, ID2, with the radii A1I, A2I; those arcs will be the developments of arcs of the pitch-circles B1I, B2I, when the conical surfaces A1B1I, A2B2I are spread out flat. Describe the figures of teeth for the developed arcs as for a pair of spur-wheels; then wrap the developed arcs on the cones, so as to make them coincide with the pitch-circles, and trace the teeth on the conical surfaces.
§ 55. Teeth of Skew-Bevel Wheels.—The crests of the teeth of a skew-bevel wheel are parallel to the generating straight line of the hyperboloidal pitch-surface; and the transverse sections of the teeth at a given pitch-circle are similar to those of the teeth of a bevel-wheel whose pitch surface is a cone touching the hyperboloidal surface at the given circle.
§ 56. Cams.—A cam is a single tooth, either rotating continuously or oscillating, and driving a sliding or turning piece either constantly or at intervals. All the principles which have been stated in § 45 as being applicable to teeth are applicable to cams; but in designing cams it is not usual to determine or take into consideration the form of the ideal pitch-surface, which would give the same comparative motion by rolling contact that the cam gives by sliding contact.
§ 57. Screws.—The figure of a screw is that of a convex or concave cylinder, with one or more helical projections, called threads, winding round it. Convex and concave screws are distinguished technically by the respective names of male and female; a short concave screw is called a nut; and when a screw is spoken of without qualification a convex screw is usually understood.
The relation between the advance and the rotation, which compose the motion of a screw working in contact with a fixed screw or helical guide, has already been demonstrated in § 32; and the same relation exists between the magnitudes of the rotation of a screw about a fixed axis and the advance of a shifting nut in which it rotates. The advance of the nut takes place in the opposite direction to that of the advance of the screw in the case in which the nut is fixed. The pitch or axial pitch of a screw has the meaning assigned to it in that section, viz. the distance, measured parallel to the axis, between the corresponding points in two successive turns of the same thread. If, therefore, the screw has several equidistant threads, the true pitch is equal to the divided axial pitch, as measured between two adjacent threads, multiplied by the number of threads.
If a helix be described round the screw, crossing each turn of the thread at right angles, the distance between two corresponding points on two successive turns of the same thread, measured along this normal helix, may be called the normal pitch; and when the screw has more than one thread the normal pitch from thread to thread may be called the normal divided pitch.
The distance from thread to thread, measured on a circle described about the axis of the screw, called the pitch-circle, may be called the circumferential pitch; for a screw of one thread it is one circumference; for a screw of n threads, (one circumference)/n.
Let r denote the radius of the pitch circle;
n the number of threads;
θ the obliquity of the threads to the pitch circle, and of the normal helix to the axis;
| Pa | the axial | pitch |
| Pa/n = pa | divided pitch; | |
| Pn | the normal | pitch |
| Pn/n = pn | divided pitch; | |
| Pc the circumferential pitch; | ||
then
| pc = pa cot θ = pn cos θ = | 2πr | , |
| n |
| pa = pn sec θ = pc tan θ = | 2πr tan θ | , |
| n |
| pn = pc sin θ = pa cos θ = | 2πr sin θ | . |
| n |
If a screw rotates, the number of threads which pass a fixed point in one revolution is the number of threads in the screw.
A pair of convex screws, each rotating about its axis, are used as an elementary combination to transmit motion by the sliding contact of their threads. Such screws are commonly called endless screws. At the point of contact of the screws their threads must be parallel; and their line of connexion is the common perpendicular to the acting surfaces of the threads at their point of contact. Hence the following principles:—
I. If the screws are both right-handed or both left-handed, the angle between the directions of their axes is the sum of their obliquities; if one is right-handed and the other left-handed, that angle is the difference of their obliquities.
II. The normal pitch for a screw of one thread, and the normal divided pitch for a screw of more than one thread, must be the same in each screw.
III. The angular velocities of the screws are inversely as their numbers of threads.
Hooke’s wheels with oblique or helical teeth are in fact screws of many threads, and of large diameters as compared with their lengths.
The ordinary position of a pair of endless screws is with their axes at right angles to each other. When one is of considerably greater diameter than the other, the larger is commonly called in practice a wheel, the name screw being applied to the smaller only; but they are nevertheless both screws in fact.
To make the teeth of a pair of endless screws fit correctly and work smoothly, a hardened steel screw is made of the figure of the smaller screw, with its thread or threads notched so as to form a cutting tool; the larger screw, or “wheel,” is cast approximately of the required figure; the larger screw and the steel screw are fitted up in their proper relative position, and made to rotate in contact with each other by turning the steel screw, which cuts the threads of the larger screw to their true figure.
 |
| Fig. 107. |
§ 58. Coupling of Parallel Axes—Oldham’s Coupling.—A coupling is a mode of connecting a pair of shafts so that they shall rotate in the same direction with the same mean angular velocity. If the axes of the shafts are in the same straight line, the coupling consists in so connecting their contiguous ends that they shall rotate as one piece; but if the axes are not in the same straight line combinations of mechanism are required. A coupling for parallel shafts which acts by sliding contact was invented by Oldham, and is represented in fig. 107. C1, C2 are the axes of the two parallel shafts; D1, D2 two disks facing each other, fixed on the ends of the two shafts respectively; E1E1 a bar sliding in a diametral groove in the face of D1; E2E2 a bar sliding in a diametral groove in the face of D2: those bars are fixed together at A, so as to form a rigid cross. The angular velocities of the two disks and of the cross are all equal at every instant; the middle point of the cross, at A, revolves in the dotted circle described upon the line of centres C1C2 as a diameter twice for each turn of the disks and cross; the instantaneous axis of rotation of the cross at any instant is at I, the point in the circle C1C2 diametrically opposite to A.
Oldham’s coupling may be used with advantage where the axes of the shafts are intended to be as nearly in the same straight line as is possible, but where there is some doubt as to the practibility or permanency of their exact continuity.
§ 59. Wrapping Connectors—Belts, Cords and Chains.—Flat belts of leather or of gutta percha, round cords of catgut, hemp or other material, and metal chains are used as wrapping connectors to transmit rotatory motion between pairs of pulleys and drums.
Belts (the most frequently used of all wrapping connectors) require nearly cylindrical pulleys. A belt tends to move towards that part of a pulley whose radius is greatest; pulleys for belts, therefore, are slightly swelled in the middle, in order that the belt may remain on the pulley, unless forcibly shifted. A belt when in motion is shifted off a pulley, or from one pulley on to another of equal size alongside of it, by pressing against that part of the belt which is moving towards the pulley.
Cords require either cylindrical drums with ledges or grooved pulleys.
Chains require pulleys or drums, grooved, notched and toothed, so as to fit the links of the chain.
Wrapping connectors for communicating continuous motion are endless.
Wrapping connectors for communicating reciprocating motion have usually their ends made fast to the pulleys or drums which they connect, and which in this case may be sectors.
 |
| Fig. 108. |
The line of connexion of two pieces connected by a wrapping connector is the centre line of the belt, cord or chain; and the comparative motions of the pieces are determined by the principles of § 36 if both pieces turn, and of § 37 if one turns and the other shifts, in which latter case the motion must be reciprocating.
The pitch-line of a pulley or drum is a curve to which the line of connexion is always a tangent—that is to say, it is a curve parallel to the acting surface of the pulley or drum, and distant from it by half the thickness of the wrapping connector.
Pulleys and drums for communicating a constant velocity ratio are circular. The effective radius, or radius of the pitch-circle of a circular pulley or drum, is equal to the real radius added to half the thickness of the connector. The 1005 angular velocities of a pair of connected circular pulleys or drums are inversely as the effective radii.
A crossed belt, as in fig. 108, A, reverses the direction of the rotation communicated; an uncrossed belt, as in fig. 108, B, preserves that direction.
The length L of an endless belt connecting a pair of pulleys whose effective radii are r1, r2, with parallel axes whose distance apart is c, is given by the following formulae, in each of which the first term, containing the radical, expresses the length of the straight parts of the belt, and the remainder of the formula the length of the curved parts.
For a crossed belt:—
| L = 2 √ {c2 − (r1 + r2)2} + (r1 + r2) ( π − 2 sin−1 | r1 + r2 | ); |
| c |
and for an uncrossed belt:—
| L = 2 √ {c2 − (r1 − r2)2 } + π (r1 + r2 + 2 (r1 − r2) sin−1 | r1 − r2 | ; |
| c |
in which r1 is the greater radius, and r2 the less.
When the axes of a pair of pulleys are not parallel, the pulleys should be so placed that the part of the belt which is approaching each pulley shall be in the plane of the pulley.
§ 60. Speed-Cones.—A pair of speed-cones (fig. 109) is a contrivance for varying and adjusting the velocity ratio communicated between a pair of parallel shafts by means of a belt. The speed-cones are either continuous cones or conoids, as A, B, whose velocity ratio can be varied gradually while they are in motion by shifting the belt, or sets of pulleys whose radii vary by steps, as C, D, in which case the velocity ratio can be changed by shifting the belt from one pair of pulleys to another.
 |
| Fig. 109. |
In order that the belt may fit accurately in every possible position on a pair of speed-cones, the quantity L must be constant, in equations (32 A) or (32 B), according as the belt is crossed or uncrossed.
For a crossed belt, as in A and C, fig. 109, L depends solely on c and on r1 + r2. Now c is constant because the axes are parallel; therefore the sum of the radii of the pitch-circles connected in every position of the belt is to be constant. That condition is fulfilled by a pair of continuous cones generated by the revolution of two straight lines inclined opposite ways to their respective axes at equal angles.
For an uncrossed belt, the quantity L in equation (32 B) is to be made constant. The exact fulfilment of this condition requires the solution of a transcendental equation; but it may be fulfilled with accuracy sufficient for practical purposes by using, instead of (32 B) the following approximate equation:—
L nearly = 2c + π (r1 + r2) + (r1 − r2)2 / c.
The following is the most convenient practical rule for the application of this equation:—
Let the speed-cones be equal and similar conoids, as in B, fig. 109, but with their large and small ends turned opposite ways. Let r1 be the radius of the large end of each, r2 that of the small end, r0 that of the middle; and let v be the sagitta, measured perpendicular to the axes, of the arc by whose revolution each of the conoids is generated, or, in other words, the bulging of the conoids in the middle of their length. Then
v = r0 − (r1 + r2) / 2 = (r1 − r2)2 / 2πc.
2π = 6.2832; but 6 may be used in most practical cases without sensible error.
The radii at the middle and end being thus determined, make the generating curve an arc either of a circle or of a parabola.
§ 61. Linkwork in General.—The pieces which are connected by linkwork, if they rotate or oscillate, are usually called cranks, beams and levers. The link by which they are connected is a rigid rod or bar, which may be straight or of any other figure; the straight figure being the most favourable to strength, is always used when there is no special reason to the contrary. The link is known by various names in various circumstances, such as coupling-rod, connecting-rod, crank-rod, eccentric-rod, &c. It is attached to the pieces which it connects by two pins, about which it is free to turn. The effect of the link is to maintain the distance between the axes of those pins invariable; hence the common perpendicular of the axes of the pins is the line of connexion, and its extremities may be called the connected points. In a turning piece, the perpendicular let fall from its connected point upon its axis of rotation is the arm or crank-arm.
The axes of rotation of a pair of turning pieces connected by a link are almost always parallel, and perpendicular to the line of connexion in which case the angular velocity ratio at any instant is the reciprocal of the ratio of the common perpendiculars let fall from the line of connexion upon the respective axes of rotation.
If at any instant the direction of one of the crank-arms coincides with the line of connexion, the common perpendicular of the line of connexion and the axis of that crank-arm vanishes, and the directional relation of the motions becomes indeterminate. The position of the connected point of the crank-arm in question at such an instant is called a dead-point. The velocity of the other connected point at such an instant is null, unless it also reaches a dead-point at the same instant, so that the line of connexion is in the plane of the two axes of rotation, in which case the velocity ratio is indeterminate. Examples of dead-points, and of the means of preventing the inconvenience which they tend to occasion, will appear in the sequel.
§ 62. Coupling of Parallel Axes.—Two or more parallel shafts (such as those of a locomotive engine, with two or more pairs of driving wheels) are made to rotate with constantly equal angular velocities by having equal cranks, which are maintained parallel by a coupling-rod of such a length that the line of connexion is equal to the distance between the axes. The cranks pass their dead-points simultaneously. To obviate the unsteadiness of motion which this tends to cause, the shafts are provided with a second set of cranks at right angles to the first, connected by means of a similar coupling-rod, so that one set of cranks pass their dead points at the instant when the other set are farthest from theirs.
§ 63. Comparative Motion of Connected Points.—As the link is a rigid body, it is obvious that its action in communicating motion may be determined by finding the comparative motion of the connected points, and this is often the most convenient method of proceeding.
If a connected point belongs to a turning piece, the direction of its motion at a given instant is perpendicular to the plane containing the axis and crank-arm of the piece. If a connected point belongs to a shifting piece, the direction of its motion at any instant is given, and a plane can be drawn perpendicular to that direction.
The line of intersection of the planes perpendicular to the paths of the two connected points at a given instant is the instantaneous axis of the link at that instant; and the velocities of the connected points are directly as their distances from that axis.
 |
| Fig. 110. |
In drawing on a plane surface, the two planes perpendicular to the paths of the connected points are represented by two lines (being their sections by a plane normal to them), and the instantaneous axis by a point (fig. 110); and, should the length of the two lines render it impracticable to produce them until they actually intersect, the velocity ratio of the connected points may be found by the principle that it is equal to the ratio of the segments which a line parallel to the line of connexion cuts off from any two lines drawn from a given point, perpendicular respectively to the paths of the connected points.
To illustrate this by one example. Let C1 be the axis, and T1 the connected point of the beam of a steam-engine; T1T2 the connecting or crank-rod; T2 the other connected point, and the centre of the crank-pin; C2 the axis of the crank and its shaft. Let v1 denote the velocity of T1 at any given instant; v2 that of T2. To find the ratio of these velocities, produce C1T1, C2T2 till they intersect in K; K is the instantaneous axis of the connecting rod, and the velocity ratio is
v1 : v2 :: KT1 : KT2.
Should K be inconveniently far off, draw any triangle with its sides respectively parallel to C1T1, C2T2 and T1T2; the ratio of the two sides first mentioned will be the velocity ratio required. For example, draw C2A parallel to C1T1, cutting T1T2 in A; then
v1 : v2 :: C2A : C2T2.
§ 64. Eccentric.—An eccentric circular disk fixed on a shaft, and used to give a reciprocating motion to a rod, is in effect a crank-pin of sufficiently large diameter to surround the shaft, and so to avoid the weakening of the shaft which would arise from bending it so as to form an ordinary crank. The centre of the eccentric is its connected point; and its eccentricity, or the distance from that centre to the axis of the shaft, is its crank-arm.
An eccentric may be made capable of having its eccentricity altered by means of an adjusting screw, so as to vary the extent of the reciprocating motion which it communicates.
§ 65. Reciprocating Pieces—Stroke—Dead-Points.—The distance between the extremities of the path of the connected point in a reciprocating piece (such as the piston of a steam-engine) is called the stroke or length of stroke of that piece. When it is connected with a continuously turning piece (such as the crank of a steam-engine) the ends of the stroke of the reciprocating piece correspond to the 1006 dead-points of the path of the connected point of the turning piece, where the line of connexion is continuous with or coincides with the crank-arm.
Let S be the length of stroke of the reciprocating piece, L the length of the line of connexion, and R the crank-arm of the continuously turning piece. Then, if the two ends of the stroke be in one straight line with the axis of the crank,
S = 2R;
and if these ends be not in one straight line with that axis, then S, L − R, and L + R, are the three sides of a triangle, having the angle opposite S at that axis; so that, if θ be the supplement of the arc between the dead-points,
S2 = 2 (L2 + R2) − 2 (L2 − R2) cos θ,
| cos θ = | 2L2 + 2R2 − S2 | . |
| 2 (L2 − R2) |
 |
| Fig. 111. |
§ 66. Coupling of Intersecting Axes—Hooke’s Universal Joint.—Intersecting axes are coupled by a contrivance of Hooke’s, known as the “universal joint,” which belongs to the class of linkwork (see fig. 111). Let O be the point of intersection of the axes OC1, OC2, and θ their angle of inclination to each other. The pair of shafts C1, C2 terminate in a pair of forks F1, F2 in bearings at the extremities of which turn the gudgeons at the ends of the arms of a rectangular cross, having its centre at O. This cross is the link; the connected points are the centres of the bearings F1, F2. At each instant each of those points moves at right angles to the central plane of its shaft and fork, therefore the line of intersection of the central planes of the two forks at any instant is the instantaneous axis of the cross, and the velocity ratio of the points F1, F2 (which, as the forks are equal, is also the angular velocity ratio of the shafts) is equal to the ratio of the distances of those points from that instantaneous axis. The mean value of that velocity ratio is that of equality, for each successive quarter-turn is made by both shafts in the same time; but its actual value fluctuates between the limits:—
| α2 | = | 1 | when F1 is the plane of OC1C2 |
| α1 | cos θ |
| and | α2 | = cos θ when F2 is in that plane. |
| α1 |
Its value at intermediate instants is given by the following equations: let φ1, φ2 be the angles respectively made by the central planes of the forks and shafts with the plane OC1C2 at a given instant; then
cos θ = tan φ1 tan φ2,
| α2 | = − | dφ2 | = | tan φ1 + cot φ1 | . |
| α1 | dφ1 | tan φ2 + cot φ2 |
§ 67. Intermittent Linkwork—Click and Ratchet.—A click acting upon a ratchet-wheel or rack, which it pushes or pulls through a certain arc at each forward stroke and leaves at rest at each backward stroke, is an example of intermittent linkwork. During the forward stroke the action of the click is governed by the principles of linkwork; during the backward stroke that action ceases. A catch or pall, turning on a fixed axis, prevents the ratchet-wheel or rack from reversing its motion.
Division 5.—Trains of Mechanism.
§ 68. General Principles..—A train of mechanism consists of a series of pieces each of which is follower to that which drives it and driver to that which follows it.
The comparative motion of the first driver and last follower is obtained by combining the proportions expressing by their terms the velocity ratios and by their signs the directional relations of the several elementary combinations of which the train consists.
§ 69. Trains of Wheelwork.—Let A1, A2, A3, &c., Am−1, Am denote a series of axes, and α1, α2, α3, &c., αm−1, αm their angular velocities. Let the axis A1 carry a wheel of N1 teeth, driving a wheel of n2 teeth on the axis A2, which carries also a wheel of N2 teeth, driving a wheel of n3 teeth on the axis A3, and so on; the numbers of teeth in drivers being denoted by N′s, and in followers by n’s, and the axes to which the wheels are fixed being denoted by numbers. Then the resulting velocity ratio is denoted by
| αm | = | α2 | · | α3 | · &c. ... | αm | = | N1 · N2 ... &c. ... Nm−1 | ; |
| α1 | α1 | α2 | αm−1 | n2 · n3 ... &c. ... nm |
that is to say, the velocity ratio of the last and first axes is the ratio of the product of the numbers of teeth in the drivers to the product of the numbers of teeth in the followers.
Supposing all the wheels to be in outside gearing, then, as each elementary combination reverses the direction of rotation, and as the number of elementary combinations m − 1 is one less than the number of axes m, it is evident that if m is odd the direction of rotation is preserved, and if even reversed.
It is often a question of importance to determine the number of teeth in a train of wheels best suited for giving a determinate velocity ratio to two axes. It was shown by Young that, to do this with the least total number of teeth, the velocity ratio of each elementary combination should approximate as nearly as possible to 3.59. This would in many cases give too many axes; and, as a useful practical rule, it may be laid down that from 3 to 6 ought to be the limit of the velocity ratio of an elementary combination in wheel-work. The smallest number of teeth in a pinion for epicycloidal teeth ought to be twelve (see § 49)—but it is better, for smoothness of motion, not to go below fifteen; and for involute teeth the smallest number is about twenty-four.
Let B/C be the velocity ratio required, reduced to its least terms, and let B be greater than C. If B/C is not greater than 6, and C lies between the prescribed minimum number of teeth (which may be called t) and its double 2t, then one pair of wheels will answer the purpose, and B and C will themselves be the numbers required. Should B and C be inconveniently large, they are, if possible, to be resolved into factors, and those factors (or if they are too small, multiples of them) used for the number of teeth. Should B or C, or both, be at once inconveniently large and prime, then, instead of the exact ratio B/C some ratio approximating to that ratio, and capable of resolution into convenient factors, is to be found by the method of continued fractions.
Should B/C be greater than 6, the best number of elementary combinations m − 1 will lie between
| log B − log C | and | log B − log C | . |
| log 6 | log 3 |
Then, if possible, B and C themselves are to be resolved each into m − 1 factors (counting 1 as a factor), which factors, or multiples of them, shall be not less than t nor greater than 6t; or if B and C contain inconveniently large prime factors, an approximate velocity ratio, found by the method of continued fractions, is to be substituted for B/C as before.
So far as the resultant velocity ratio is concerned, the order of the drivers N and of the followers n is immaterial: but to secure equable wear of the teeth, as explained in § 44, the wheels ought to be so arranged that, for each elementary combination, the greatest common divisor of N and n shall be either 1, or as small as possible.
§ 70. Double Hooke’s Coupling.—It has been shown in § 66 that the velocity ratio of a pair of shafts coupled by a universal joint fluctuates between the limits cos θ and 1/cos θ. Hence one or both of the shafts must have a vibratory and unsteady motion, injurious to the mechanism and framework. To obviate this evil a short intermediate shaft is introduced, making equal angles with the first and last shaft, coupled with each of them by a Hooke’s joint, and having its own two forks in the same plane. Let α1, α2, α3 be the angular velocities of the first, intermediate, and last shaft in this train of two Hooke’s couplings. Then, from the principles of § 60 it is evident that at each instant α2/α1 = α2/α3, and consequently that α3 = α1; so that the fluctuations of angular velocity ratio caused by the first coupling are exactly neutralized by the second, and the first and last shafts have equal angular velocities at each instant.
§ 71. Converging and Diverging Trains of Mechanism.—Two or more trains of mechanism may converge into one—as when the two pistons of a pair of steam-engines, each through its own connecting-rod, act upon one crank-shaft. One train of mechanism may diverge into two or more—as when a single shaft, driven by a prime mover, carries several pulleys, each of which drives a different machine. The principles of comparative motion in such converging and diverging trains are the same as in simple trains.
Division 6.—Aggregate Combinations.
§ 72. General Principles.—Willis designated as “aggregate combinations” those assemblages of pieces of mechanism in which the motion of one follower is the resultant of component motions impressed on it by more than one driver. Two classes of aggregate combinations may be distinguished which, though not different in their actual nature, differ in the data which they present to the designer, and in the method of solution to be followed in questions respecting them.
Class I. comprises those cases in which a piece A is not carried directly by the frame C, but by another piece B, relatively to which the motion of A is given—the motion of the piece B relatively to the frame C being also given. Then the motion of A relatively to the frame C is the resultant of the motion of A relatively to B and of B relatively to C; and that resultant is to be found by the principles already explained in Division 3 of this Chapter §§ 27-32.
Class II. comprises those cases in which the motions of three points in one follower are determined by their connexions with two or with three different drivers.
This classification is founded on the kinds of problems arising from the combinations. Willis adopts another classification founded on the objects of the combinations, which objects he divides into two classes, viz. (1) to produce aggregate velocity, or a velocity which is the resultant of two or more components in the same path, and (2) to produce an aggregate path—that is, to make a given point 1007 in a rigid body move in an assigned path by communicating certain motions to other points in that body.
It is seldom that one of these effects is produced without at the same time producing the other; but the classification of Willis depends upon which of those two effects, even supposing them to occur together, is the practical object of the mechanism.
 |
| Fig. 112. |
§ 73. Differential Windlass.—The axis C (fig. 112) carries a larger barrel AE and a smaller barrel DB, rotating as one piece with the angular velocity α1 in the direction AE. The pulley or sheave FG has a weight W hung to its centre. A cord has one end made fast to and wrapped round the barrel AE; it passes from A under the sheave FG, and has the other end wrapped round and made fast to the barrel BD. Required the relation between the velocity of translation v2 of W and the angular velocity α1 of the differential barrel.
In this case v2 is an aggregate velocity, produced by the joint action of the two drivers AE and BD, transmitted by wrapping connectors to FG, and combined by that sheave so as to act on the follower W, whose motion is the same with that of the centre of FG.
The velocity of the point F is α1·AC, upward motion being considered positive. The velocity of the point G is −α1·CB, downward motion being negative. Hence the instantaneous axis of the sheave FG is in the diameter FG, at the distance
| FG | · | AC − BC |
| 2 | AC + BC |
from the centre towards G; the angular velocity of the sheave is
| α2 = α1 · | AC + BC | ; |
| FG |
and, consequently, the velocity of its centre is
| v2 = α2 · | FG | · | AC − BC | = | α1 (AC − BC) | , |
| 2 | AC + BC | 2 |
or the mean between the velocities of the two vertical parts of the cord.
If the cord be fixed to the framework at the point B, instead of being wound on a barrel, the velocity of W is half that of AF.
A case containing several sheaves is called a block. A fall-block is attached to a fixed point; a running-block is movable to and from a fall-block, with which it is connected by two or more plies of a rope. The whole combination constitutes a tackle or purchase. (See Pulleys for practical applications of these principles.)
§ 74. Differential Screw.—On the same axis let there be two screws of the respective pitches p1 and p2, made in one piece, and rotating with the angular velocity α. Let this piece be called B. Let the first screw turn in a fixed nut C, and the second in a sliding nut A. The velocity of advance of B relatively to C is (according to § 32) αp1, and of A relatively to B (according to § 57) −αp2; hence the velocity of A relatively to C is
α (p1 − p2),
being the same with the velocity of advance of a screw of the pitch p1 − p2. This combination, called Hunter’s or the differential screw, combines the strength of a large thread with the slowness of motion due to a small one.
§ 75. Epicyclic Trains.—The term epicyclic train is used by Willis to denote a train of wheels carried by an arm, and having certain rotations relatively to that arm, which itself rotates. The arm may either be driven by the wheels or assist in driving them. The comparative motions of the wheels and of the arm, and the aggregate paths traced by points in the wheels, are determined by the principles of the composition of rotations, and of the description of rolling curves, explained in §§ 30, 31.
§ 76. Link Motion.—A slide valve operated by a link motion receives an aggregate motion from the mechanism driving it. (See Steam-engine for a description of this and other types of mechanism of this class.)
 |
| Fig. 113. |
§ 77. Parallel Motions.—A parallel motion is a combination of turning pieces in mechanism designed to guide the motion of a reciprocating piece either exactly or approximately in a straight line, so as to avoid the friction which arises from the use of straight guides for that purpose.
Fig. 113 represents an exact parallel motion, first proposed, it is believed, by Scott Russell. The arm CD turns on the axis C, and is jointed at D to the middle of the bar ADB, whose length is double of that of CD, and one of whose ends B is jointed to a slider, sliding in straight guides along the line CB. Draw BE perpendicular to CB, cutting CD produced in E, then E is the instantaneous axis of the bar ADB; and the direction of motion of A is at every instant perpendicular to EA—that is, along the straight line ACa. While the stroke of A is ACa, extending to equal distances on either side of C, and equal to twice the chord of the arc Dd, the stroke of B is only equal to twice the sagitta; and thus A is guided through a comparatively long stroke by the sliding of B through a comparatively short stroke, and by rotatory motions at the joints C, D, B.
 | |
| Fig. 114. | Fig. 115. |
§ 78.* An example of an approximate straight-line motion composed of three bars fixed to a frame is shown in fig. 114. It is due to P. L. Tchebichev of St Petersburg. The links AB and CD are equal in length and are centred respectively at A and C. The ends D and B are joined by a link DB. If the respective lengths are made in the proportions AC : CD : DB = 1 : 1.3 : 0.4 the middle point P of DB will describe an approximately straight line parallel to AC within limits of length about equal to AC. C. N. Peaucellier, a French engineer officer, was the first, in 1864, to invent a linkwork with which an exact straight line could be drawn. The linkwork is shown in fig. 115, from which it will be seen that it consists of a rhombus of four equal bars ABCD, jointed at opposite corners with two equal bars BE and DE. The seventh link AF is equal in length to halt the distance EA when the mechanism is in its central position. The points E and F are fixed. It can be proved that the point C always moves in a straight line at right angles to the line EF. The more general property of the mechanism corresponding to proportions between the lengths FA and EF other than that of equality is that the curve described by the point C is the inverse of the curve described by A. There are other arrangements of bars giving straight-line motions, and these arrangements together with the general properties of mechanisms of this kind are discussed in How to Draw a Straight Line by A. B. Kempe (London, 1877).
 |
| Fig. 116. |
 |
| Fig. 117. |
§ 79.* The Pantograph.—If a parallelogram of links (fig. 116), be fixed at any one point a in any one of the links produced in either direction, and if any straight line be drawn from this point to cut the links in the points b and c, then the points a, b, c will be in a straight line for all positions of the mechanism, and if the point b be guided in any curve whatever, the point c will trace a similar curve to a scale enlarged in the ratio ab : ac. This property of the parallelogram is utilized in the construction of the pantograph, an instrument used for obtaining a copy of a map or drawing on a different scale. Professor J. J. Sylvester discovered that this property of the parallelogram is not confined to points lying in one line with the fixed point. Thus if b (fig. 117) be any point on the link CD, and if a point c be taken on the link DE such that the triangles CbD and DcE are similar and similarly situated with regard to their respective links, then the ratio of the distances ab and ac is constant, and the angle bac is constant for all positions of the mechanism; so that, if b is guided in any curve, the point c will describe a similar curve turned through an angle bac, the scales of the curves being in the ratio ab to ac. Sylvester called an instrument based on this property a plagiograph or a skew pantograph.
The combination of the parallelogram with a straight-line motion, for guiding one of the points in a straight line, is illustrated in Watt’s parallel motion for steam-engines. (See Steam-engine.)
§ 80.* The Reuleaux System of Analysis.—If two pieces, A and B, (fig. 118) are jointed together by a pin, the pin being fixed, say, to A, the only relative motion possible between the pieces is one of turning about the axis of the pin. Whatever motion the pair of pieces may have as a whole each separate piece shares in common, and this common motion in no way affects the relative motion of A and B. The motion of one piece is said to be completely constrained relatively to the other piece. Again, the pieces A and B (fig. 119) are paired together as a slide, and the only relative motion possible between them now is that of sliding, and therefore the motion of one relatively to the other is completely constrained. The pieces may be paired 1008 together as a screw and nut, in which case the relative motion is compounded of turning with sliding.
 | |
| Fig. 118. | Fig. 119. |
These combinations of pieces are known individually as kinematic pairs of elements, or briefly kinematic pairs. The three pairs mentioned above have each the peculiarity that contact between the two pieces forming the pair is distributed over a surface. Kinematic pairs which have surface contact are classified as lower pairs. Kinematic pairs in which contact takes place along a line only are classified as higher pairs. A pair of spur wheels in gear is an example of a higher pair, because the wheels have contact between their teeth along lines only.
A kinematic link of the simplest form is made by joining up the halves of two kinematic pairs by means of a rigid link. Thus if A1B1 represent a turning pair, and A2B2 a second turning pair, the rigid link formed by joining B1 to B2 is a kinematic link. Four links of this kind are shown in fig. 120 joined up to form a closed kinematic chain.
 |
| Fig. 120. |
In order that a kinematic chain may be made the basis of a mechanism, every point in any link of it must be completely constrained with regard to every other link. Thus in fig. 120 the motion of a point a in the link A1A2 is completely constrained with regard to the link B1B4 by the turning pair A1B1, and it can be proved that the motion of a relatively to the non-adjacent link A3A4 is completely constrained, and therefore the four-bar chain, as it is called, can be and is used as the basis of many mechanisms. Another way of considering the question of constraint is to imagine any one link of the chain fixed; then, however the chain be moved, the path of a point, as a, will always remain the same. In a five-bar chain, if a is a point in a link non-adjacent to a fixed link, its path is indeterminate. Still another way of stating the matter is to say that, if any one link in the chain be fixed, any point in the chain must have only one degree of freedom. In a five-bar chain a point, as a, in a link non-adjacent to the fixed link has two degrees of freedom and the chain cannot therefore be used for a mechanism. These principles may be applied to examine any possible combination of links forming a kinematic chain in order to test its suitability for use as a mechanism. Compound chains are formed by the superposition of two or more simple chains, and in these more complex chains links will be found carrying three, or even more, halves of kinematic pairs. The Joy valve gear mechanism is a good example of a compound kinematic chain.
 |
| Fig. 121. |
A chain built up of three turning pairs and one sliding pair, and known as the slider crank chain, is shown in fig. 121. It will be seen that the piece A1 can only slide relatively to the piece B1, and these two pieces therefore form the sliding pair. The piece A1 carries the pin B4, which is one half of the turning pair A4 B4. The piece A1 together with the pin B4 therefore form a kinematic link A1B4. The other links of the chain are, B1A2, B2B3, A3A4. In order to convert a chain into a mechanism it is necessary to fix one link in it. Any one of the links may be fixed. It follows therefore that there are as many possible mechanisms as there are links in the chain. For example, there is a well-known mechanism corresponding to the fixing of three of the four links of the slider crank chain (fig. 121). If the link d is fixed the chain at once becomes the mechanism of the ordinary steam engine; if the link e is fixed the mechanism obtained is that of the oscillating cylinder steam engine; if the link c is fixed the mechanism becomes either the Whitworth quick-return motion or the slot-bar motion, depending upon the proportion between the lengths of the links c and e. These different mechanisms are called inversions of the slider crank chain. What was the fixed framework of the mechanism in one case becomes a moving link in an inversion.
The Reuleaux system, therefore, consists essentially of the analysis of every mechanism into a kinematic chain, and since each link of the chain may be the fixed frame of a mechanism quite diverse mechanisms are found to be merely inversions of the same kinematic chain. Franz Reuleaux’s Kinematics of Machinery, translated by Sir A. B. W. Kennedy (London, 1876), is the book in which the system is set forth in all its completeness. In Mechanics of Machinery, by Sir A. B. W. Kennedy (London, 1886), the system was used for the first time in an English textbook, and now it has found its way into most modern textbooks relating to the subject of mechanism.
§ 81.* Centrodes, Instantaneous Centres, Velocity Image, Velocity Diagram.—Problems concerning the relative motion of the several parts of a kinematic chain may be considered in two ways, in addition to the way hitherto used in this article and based on the principle of § 34. The first is by the method of instantaneous centres, already exemplified in § 63, and rolling centroids, developed by Reuleaux in connexion with his method of analysis. The second is by means of Professor R. H. Smith’s method already referred to in § 23.
Method 1.—By reference to § 30 it will be seen that the motion of a cylinder rolling on a fixed cylinder is one of rotation about an instantaneous axis T, and that the velocity both as regards direction and magnitude is the same as if the rolling piece B were for the instant turning about a fixed axis coincident with the instantaneous axis. If the rolling cylinder B and its path A now be assumed to receive a common plane motion, what was before the velocity of the point P becomes the velocity of P relatively to the cylinder A, since the motion of B relatively to A still takes place about the instantaneous axis T. If B stops rolling, then the two cylinders continue to move as though they were parts of a rigid body. Notice that the shape of either rolling curve (fig. 91 or 92) may be found by considering each fixed in turn and then tracing out the locus of the instantaneous axis. These rolling cylinders are sometimes called axodes, and a section of an axode in a plane parallel to the plane of motion is called a centrode. The axode is hence the locus of the instantaneous axis, whilst the centrode is the locus of the instantaneous centre in any plane parallel to the plane of motion. There is no restriction on the shape of these rolling axodes; they may have any shape consistent with rolling (that is, no slipping is permitted), and the relative velocity of a point P is still found by considering it with regard to the instantaneous centre.
Reuleaux has shown that the relative motion of any pair of non-adjacent links of a kinematic chain is determined by the rolling together of two ideal cylindrical surfaces (cylindrical being used here in the general sense), each of which may be assumed to be formed by the extension of the material of the link to which it corresponds. These surfaces have contact at the instantaneous axis, which is now called the instantaneous axis of the two links concerned. To find the form of these surfaces corresponding to a particular pair of non-adjacent links, consider each link of the pair fixed in turn, then the locus of the instantaneous axis is the axode corresponding to the fixed link, or, considering a plane of motion only, the locus of the instantaneous centre is the centrode corresponding to the fixed link.
To find the instantaneous centre for a particular link corresponding to any given configuration of the kinematic chain, it is only necessary to know the direction of motion of any two points in the link, since lines through these points respectively at right angles to their directions of motion intersect in the instantaneous centre.
 |
| Fig. 122. |
To illustrate this principle, consider the four-bar chain shown in fig. 122 made up of the four links, a, b, c, d. Let a be the fixed link, and consider the link c. Its extremities are moving respectively in directions at right angles to the links b and d; hence produce the links b and d to meet in the point Oac. This point is the instantaneous centre of the motion of the link c relatively to the fixed link a, a fact indicated by the suffix ac placed after the letter O. The process being repeated for different values of the angle θ the curve through the several points Oac is the centroid which may be imagined as formed by an extension of the material of the link a. To find the corresponding centroid for the link c, fix c and repeat the process. Again, imagine d fixed, then the instantaneous centre Obd of b with regard to d is found by producing the links c and a to intersect in Obd, and the shapes of the centroids belonging respectively to the links b and d can be found as before. The axis about which a pair of adjacent links turn is a permanent axis, and is of course the axis 1009 of the pin which forms the point. Adding the centres corresponding to these several axes to the figure, it will be seen that there are six centres in connexion with the four-bar chain of which four are permanent and two are instantaneous or virtual centres; and, further, that whatever be the configuration of the chain these centres group themselves into three sets of three, each set lying on a straight line. This peculiarity is not an accident or a special property of the four-bar chain, but is an illustration of a general law regarding the subject discovered by Aronhold and Sir A. B. W. Kennedy independently, which may be thus stated: If any three bodies, a, b, c, have plane motion their three virtual centres, Oab, Obc, Oac, are three points on one straight line. A proof of this will be found in The Mechanics of Machinery quoted above. Having obtained the set of instantaneous centres for a chain, suppose a is the fixed link of the chain and c any other link; then Oac is the instantaneous centre of the two links and may be considered for the instant as the trace of an axis fixed to an extension of the link a about which c is turning, and thus problems of instantaneous velocity concerning the link c are solved as though the link c were merely rotating for the instant about a fixed axis coincident with the instantaneous axis.
 | |
| Fig. 123. | Fig. 124. |
Method 2.—The second method is based upon the vector representation of velocity, and may be illustrated by applying it to the four-bar chain. Let AD (fig. 123) be the fixed link. Consider the link BC, and let it be required to find the velocity of the point B having given the velocity of the point C. The principle upon which the solution is based is that the only motion which B can have relatively to an axis through C fixed to the link CD is one of turning about C. Choose any pole O (fig. 124). From this pole set out Oc to represent the velocity of the point C. The direction of this must be at right angles to the line CD, because this is the only direction possible to the point C. If the link BC moves without turning, Oc will also represent the velocity of the point B; but, if the link is turning, B can only move about the axis C, and its direction of motion is therefore at right angles to the line CB. Hence set out the possible direction of B′s motion in the velocity diagram, namely cb1, at right angles to CB. But the point B must also move at right angles to AB in the case under consideration. Hence draw a line through O in the velocity diagram at right angles to AB to cut cb1 in b. Then Ob is the velocity of the point b in magnitude and direction, and cb is the tangential velocity of B relatively to C. Moreover, whatever be the actual magnitudes of the velocities, the instantaneous velocity ratio of the points C and B is given by the ratio Oc/Ob.
A most important property of the diagram (figs. 123 and 124) is the following: If points X and x are taken dividing the link BC and the tangential velocity cb, so that cx:xb = CX:XB, then Ox represents the velocity of the point X in magnitude and direction. The line cb has been called the velocity image of the rod, since it may be looked upon as a scale drawing of the rod turned through 90° from the actual rod. Or, put in another way, if the link CB is drawn to scale on the new length cb in the velocity diagram (fig. 124), then a vector drawn from O to any point on the new drawing of the rod will represent the velocity of that point of the actual rod in magnitude and direction. It will be understood that there is a new velocity diagram for every new configuration of the mechanism, and that in each new diagram the image of the rod will be different in scale. Following the method indicated above for a kinematic chain in general, there will be obtained a velocity diagram similar to that of fig. 124 for each configuration of the mechanism, a diagram in which the velocity of the several points in the chain utilized for drawing the diagram will appear to the same scale, all radiating from the pole O. The lines joining the ends of these several velocities are the several tangential velocities, each being the velocity image of a link in the chain. These several images are not to the same scale, so that although the images may be considered to form collectively an image of the chain itself, the several members of this chain-image are to different scales in any one velocity diagram, and thus the chain-image is distorted from the actual proportions of the mechanism which it represents.
 |
| Fig. 125. |
§ 82.* Acceleration Diagram. Acceleration Image.—Although it is possible to obtain the acceleration of points in a kinematic chain with one link fixed by methods which utilize the instantaneous centres of the chain, the vector method more readily lends itself to this purpose. It should be understood that the instantaneous centre considered in the preceding paragraphs is available only for estimating relative velocities; it cannot be used in a similar manner for questions regarding acceleration. That is to say, although the instantaneous centre is a centre of no velocity for the instant, it is not a centre of no acceleration, and in fact the centre of no acceleration is in general a quite different point. The general principle on which the method of drawing an acceleration diagram depends is that if a link CB (fig. 125) have plane motion and the acceleration of any point C be given in magnitude and direction, the acceleration of any other point B is the vector sum of the acceleration of C, the radial acceleration of B about C and the tangential acceleration of B about C. Let A be any origin, and let Ac represent the acceleration of the point C, ct the radial acceleration of B about C which must be in a direction parallel to BC, and tb the tangential acceleration of B about C, which must of course be at right angles to ct; then the vector sum of these three magnitudes is Ab, and this vector represents the acceleration of the point B. The directions of the radial and tangential accelerations of the point B are always known when the position of the link is assigned, since these are to be drawn respectively parallel to and at right angles to the link itself. The magnitude of the radial acceleration is given by the expression v2/BC, v being the velocity of the point B about the point C. This velocity can always be found from the velocity diagram of the chain of which the link forms a part. If dw/dt is the angular acceleration of the link, dw/dt × CB is the tangential acceleration of the point B about the point C. Generally this tangential acceleration is unknown in magnitude, and it becomes part of the problem to find it. An important property of the diagram is that if points X and x are taken dividing the link CB and the whole acceleration of B about C, namely, cb in the same ratio, then Ax represents the acceleration of the point X in magnitude and direction; cb is called the acceleration image of the rod. In applying this principle to the drawing of an acceleration diagram for a mechanism, the velocity diagram of the mechanism must be first drawn in order to afford the means of calculating the several radial accelerations of the links. Then assuming that the acceleration of one point of a particular link of the mechanism is known together with the corresponding configuration of the mechanism, the two vectors Ac and ct can be drawn. The direction of tb, the third vector in the diagram, is also known, so that the problem is reduced to the condition that b is somewhere on the line tb. Then other conditions consequent upon the fact that the link forms part of a kinematic chain operate to enable b to be fixed. These methods are set forth and exemplified in Graphics, by R. H. Smith (London, 1889). Examples, completely worked out, of velocity and acceleration diagrams for the slider crank chain, the four-bar chain, and the mechanism of the Joy valve gear will be found in ch. ix. of Valves and Valve Gear Mechanism, by W. E. Dalby (London, 1906).
Chapter II. On Applied Dynamics.
§ 83. Laws of Motion.—The action of a machine in transmitting force and motion simultaneously, or performing work, is governed, in common with the phenomena of moving bodies in general, by two “laws of motion.”
Division 1. Balanced Forces in Machines of Uniform Velocity.
§ 84. Application of Force to Mechanism.—Forces are applied in units of weight; and the unit most commonly employed in Britain is the pound avoirdupois. The action of a force applied to a body is always in reality distributed over some definite space, either a volume of three dimensions or a surface of two. An example of a force distributed throughout a volume is the weight of the body itself, which acts on every particle, however small. The pressure exerted between two bodies at their surface of contact, or between the two parts of one body on either side of an ideal surface of separation, is an example of a force distributed over a surface. The mode of distribution of a force applied to a solid body requires to be considered when its stiffness and strength are treated of; but, in questions respecting the action of a force upon a rigid body considered as a whole, the resultant of the distributed force, determined according to the principles of statics, and considered as acting in a single line and applied at a single point, may, for the occasion, be substituted for the force as really distributed. Thus, the weight of each separate piece in a machine is treated as acting wholly at its centre of gravity, and each pressure applied to it as acting at a point called the centre of pressure of the surface to which the pressure is really applied.
§ 85. Forces applied to Mechanism Classed.—If θ be the obliquity of a force F applied to a piece of a machine—that is, the angle made by the direction of the force with the direction of motion of its point of application—then by the principles of statics, F may be resolved into two rectangular components, viz.:—
Along the direction of motion, P = F cos θ
Across the direction of motion, Q = F sin θ
If the component along the direction of motion acts with the motion, it is called an effort; if against the motion, a resistance. The component across the direction of motion is a lateral pressure; the unbalanced lateral pressure on any piece, or part of a piece, is deflecting force. A lateral pressure may increase resistance by causing friction; the friction so caused acts against the motion, and is a resistance, but the lateral pressure causing it is not a resistance. Resistances are distinguished into useful and prejudicial, according as they arise from the useful effect produced by the machine or from other causes.
§ 86. Work.—Work consists in moving against resistance. The work is said to be performed, and the resistance overcome. Work is measured by the product of the resistance into the distance through which its point of application is moved. The unit of work commonly used in Britain is a resistance of one pound overcome through a distance of one foot, and is called a foot-pound.
Work is distinguished into useful work and prejudicial or lost work, according as it is performed in producing the useful effect of the machine, or in overcoming prejudicial resistance.
§ 87. Energy: Potential Energy.—Energy means capacity for performing work. The energy of an effort, or potential energy, is measured by the product of the effort into the distance through which its point of application is capable of being moved. The unit of energy is the same with the unit of work.
When the point of application of an effort has been moved through a given distance, energy is said to have been exerted to an amount expressed by the product of the effort into the distance through which its point of application has been moved.
§ 88. Variable Effort and Resistance.—If an effort has different magnitudes during different portions of the motion of its point of application through a given distance, let each different magnitude of the effort P be multiplied by the length Δs of the corresponding portion of the path of the point of application; the sum
Σ · PΔs
is the whole energy exerted. If the effort varies by insensible gradations, the energy exerted is the integral or limit towards which that sum approaches continually as the divisions of the path are made smaller and more numerous, and is expressed by
∫ P ds.
Similar processes are applicable to the finding of the work performed in overcoming a varying resistance.
The work done by a machine can be actually measured by means of a dynamometer (q.v.).
§ 89. Principle of the Equality of Energy and Work.—From the first law of motion it follows that in a machine whose pieces move with uniform velocities the efforts and resistances must balance each other. Now from the laws of statics it is known that, in order that a system of forces applied to a system of connected points may be in equilibrium, it is necessary that the sum formed by putting together the products of the forces by the respective distances through which their points of application are capable of moving simultaneously, each along the direction of the force applied to it, shall be zero,—products being considered positive or negative according as the direction of the forces and the possible motions of their points of application are the same or opposite.
In other words, the sum of the negative products is equal to the sum of the positive products. This principle, applied to a machine whose parts move with uniform velocities, is equivalent to saying that in any given interval of time the energy exerted is equal to the work performed.
The symbolical expression of this law is as follows: let efforts be applied to one or any number of points of a machine; let any one of these efforts be represented by P, and the distance traversed by its point of application in a given interval of time by ds; let resistances be overcome at one or any number of points of the same machine; let any one of these resistances be denoted by R, and the distance traversed by its point of application in the given interval of time by ds′; then
Σ · P ds = Σ · R ds′.
The lengths ds, ds′ are proportional to the velocities of the points to whose paths they belong, and the proportions of those velocities to each other are deducible from the construction of the machine by the principles of pure mechanism explained in Chapter I.
§ 90. Static Equilibrium of Mechanisms.—The principle stated in the preceding section, namely, that the energy exerted is equal to the work performed, enables the ratio of the components of the forces acting in the respective directions of motion at two points of a mechanism, one being the point of application of the effort, and the other the point of application of the resistance, to be readily found. Removing the summation signs in equation (52) in order to restrict its application to two points and dividing by the common time interval during which the respective small displacements ds and ds′ were made, it becomes P ds/dt = R ds′/dt, that is, Pv = Rv′, which shows that the force ratio is the inverse of the velocity ratio. It follows at once that any method which may be available for the determination of the velocity ratio is equally available for the determination of the force ratio, it being clearly understood that the forces involved are the components of the actual forces resolved in the direction of motion of the points. The relation between the effort and the resistance may be found by means of this principle for all kinds of mechanisms, when the friction produced by the components of the forces across the direction of motion of the two points is neglected. Consider the following example:—
 |
| Fig. 126. |
A four-bar chain having the configuration shown in fig. 126 supports a load P at the point x. What load is required at the point y to maintain the configuration shown, both loads being supposed to act vertically? Find the instantaneous centre Obd, and resolve each load in the respective directions of motion of the points x and y; thus there are obtained the components P cos θ and R cos φ. Let the mechanism have a small motion; then, for the instant, the link b is turning about its instantaneous centre Obd, and, if ω is its instantaneous angular velocity, the velocity of the point x is ωr, and the velocity of the point y is ωs. Hence, by the principle just stated, P cos θ × ωr = R cos φ × ωs. But, p and q being respectively the perpendiculars to the lines of action of the forces, this equation reduces to Pp = Rq, which shows that the ratio of the two forces may be found by taking moments about the instantaneous centre of the link on which they act.
The forces P and R may, however, act on different links. The general problem may then be thus stated: Given a mechanism of which r is the fixed link, and s and t any other two links, given also a force ƒs, acting on the link s, to find the force ƒt acting in a given direction on the link t, which will keep the mechanism in static equilibrium. The graphic solution of this problem may be effected thus:—
(1) Find the three virtual centres Ors, Ort, Ost, which must be three points in a line.
(2) Resolve ƒs into two components, one of which, namely, ƒq, passes through Ors and may be neglected, and the other ƒp passes through Ost.
(3) Find the point M, where ƒp joins the given direction of ƒt, and resolve ƒp into two components, of which one is in the direction MOrt, and may be neglected because it passes through Ort, and the other is in the given direction of ƒt and is therefore the force required.
 |
| Fig. 127. |
This statement of the problem and the solution is due to Sir A. B. W. Kennedy, and is given in ch. 8 of his Mechanics of Machinery. Another general solution of the problem is given in the Proc. Lond. Math. Soc. (1878-1879), by the same author. An example of the method of solution stated above, and taken from the Mechanics of Machinery, is illustrated by the mechanism fig. 127, which is an epicyclic train of three wheels with the first wheel r fixed. Let it be required to find the vertical force which must act at the pitch radius of the last wheel t to balance exactly a force ƒs acting vertically downwards on the arm at the point indicated in the figure. The two links concerned are the last wheel t and the arm s, the wheel r being the fixed link of the mechanism. The virtual centres Ors, Ost are at the respective axes of the wheels r and t, and the centre Ort divides the line through these two points externally in the ratio of the train of wheels. The figure sufficiently indicates the various steps of the solution.
The relation between the effort and the resistance in a machine to include the effect of friction at the joints has been investigated in a paper by Professor Fleeming Jenkin, “On the application of graphic methods to the determination of the efficiency of machinery” 1011 (Trans. Roy. Soc. Ed., vol. 28). It is shown that a machine may at any instant be represented by a frame of links the stresses in which are identical with the pressures at the joints of the mechanism. This self-strained frame is called the dynamic frame of the machine. The driving and resisting efforts are represented by elastic links in the dynamic frame, and when the frame with its elastic links is drawn the stresses in the several members of it may be determined by means of reciprocal figures. Incidentally the method gives the pressures at every joint of the mechanism.
§ 91. Efficiency.—The efficiency of a machine is the ratio of the useful work to the total work—that is, to the energy exerted—and is represented by
| Σ · Ruds′ | = | Σ · Ru ds′ | = | Σ · Ru ds′ | = | U | . |
| Σ · R ds′ | Σ · Ru ds′ + Σ · Rp ds′ | Σ · P ds | E |
Ru being taken to represent useful and Rp prejudicial resistances. The more nearly the efficiency of a machine approaches to unity the better is the machine.
§ 92. Power and Effect.—The power of a machine is the energy exerted, and the effect the useful work performed, in some interval of time of definite length, such as a second, an hour, or a day.
The unit of power, called conventionally a horse-power, is 550 foot-pounds per second, or 33,000 foot-pounds per minute, or 1,980,000 foot-pounds per hour.
§ 93. Modulus of a Machine.—In the investigation of the properties of a machine, the useful resistances to be overcome and the useful work to be performed are usually given. The prejudicial resistances arc generally functions of the useful resistances of the weights of the pieces of the mechanism, and of their form and arrangement; and, having been determined, they serve for the computation of the lost work, which, being added to the useful work, gives the expenditure of energy required. The result of this investigation, expressed in the form of an equation between this energy and the useful work, is called by Moseley the modulus of the machine. The general form of the modulus may be expressed thus—
E = U + φ (U, A) + ψ (A),
where A denotes some quantity or set of quantities depending on the form, arrangement, weight and other properties of the mechanism. Moseley, however, has pointed out that in most cases this equation takes the much more simple form of
E = (1 + A) U + B,
where A and B are constants, depending on the form, arrangement and weight of the mechanism. The efficiency corresponding to the last equation is
| U | = | 1 | . |
| E | 1 + A + B/U |
§ 94. Trains of Mechanism.—In applying the preceding principles to a train of mechanism, it may either be treated as a whole, or it may be considered in sections consisting of single pieces, or of any convenient portion of the train—each section being treated as a machine, driven by the effort applied to it and energy exerted upon it through its line of connexion with the preceding section, performing useful work by driving the following section, and losing work by overcoming its own prejudicial resistances. It is evident that the efficiency of the whole train is the product of the efficiencies of its sections.
§ 95. Rotating Pieces: Couples of Forces.—It is often convenient to express the energy exerted upon and the work performed by a turning piece in a machine in terms of the moment of the couples of forces acting on it, and of the angular velocity. The ordinary British unit of moment is a foot-pound; but it is to be remembered that this is a foot-pound of a different sort from the unit of energy and work.
If a force be applied to a turning piece in a line not passing through its axis, the axis will press against its bearings with an equal and parallel force, and the equal and opposite reaction of the bearings will constitute, together with the first-mentioned force, a couple whose arm is the perpendicular distance from the axis to the line of action of the first force.
A couple is said to be right or left handed with reference to the observer, according to the direction in which it tends to turn the body, and is a driving couple or a resisting couple according as its tendency is with or against that of the actual rotation.
Let dt be an interval of time, α the angular velocity of the piece; then αdt is the angle through which it turns in the interval dt, and ds = v dt = rα dt is the distance through which the point of application of the force moves. Let P represent an effort, so that Pr is a driving couple, then
P ds = Pv dt = Prα dt = Mα dt
is the energy exerted by the couple M in the interval dt; and a similar equation gives the work performed in overcoming a resisting couple. When several couples act on one piece, the resultant of their moments is to be multiplied by the common angular velocity of the whole piece.
§ 96. Reduction of Forces to a given Point, and of Couples to the Axis of a given Piece.—In computations respecting machines it is often convenient to substitute for a force applied to a given point, or a couple applied to a given piece, the equivalent force or couple applied to some other point or piece; that is to say, the force or couple, which, if applied to the other point or piece, would exert equal energy or employ equal work. The principles of this reduction are that the ratio of the given to the equivalent force is the reciprocal of the ratio of the velocities of their points of application, and the ratio of the given to the equivalent couple is the reciprocal of the ratio of the angular velocities of the pieces to which they are applied.
These velocity ratios are known by the construction of the mechanism, and are independent of the absolute speed.
§ 97. Balanced Lateral Pressure of Guides and Bearings.—The most important part of the lateral pressure on a piece of mechanism is the reaction of its guides, if it is a sliding piece, or of the bearings of its axis, if it is a turning piece; and the balanced portion of this reaction is equal and opposite to the resultant of all the other forces applied to the piece, its own weight included. There may be or may not be an unbalanced component in this pressure, due to the deviated motion. Its laws will be considered in the sequel.
§ 98. Friction. Unguents.—The most important kind of resistance in machines is the friction or rubbing resistance of surfaces which slide over each other. The direction of the resistance of friction is opposite to that in which the sliding takes place. Its magnitude is the product of the normal pressure or force which presses the rubbing surfaces together in a direction perpendicular to themselves into a specific constant already mentioned in § 14, as the coefficient of friction, which depends on the nature and condition of the surfaces of the unguent, if any, with which they are covered. The total pressure exerted between the rubbing surfaces is the resultant of the normal pressure and of the friction, and its obliquity, or inclination to the common perpendicular of the surfaces, is the angle of repose formerly mentioned in § 14, whose tangent is the coefficient of friction. Thus, let N be the normal pressure, R the friction, T the total pressure, ƒ the coefficient of friction, and φ the angle of repose; then
ƒ = tan φ
R = ƒN = N tan φ = T sin φ
Experiments on friction have been made by Coulomb, Samuel Vince, John Rennie, James Wood, D. Rankine and others. The most complete and elaborate experiments are those of Morin, published in his Notions fondamentales de mécanique, and republished in Britain in the works of Moseley and Gordon.
The experiments of Beauchamp Tower (“Report of Friction Experiments,” Proc. Inst. Mech. Eng., 1883) showed that when oil is supplied to a journal by means of an oil bath the coefficient of friction varies nearly inversely as the load on the bearing, thus making the product of the load on the bearing and the coefficient of friction a constant. Mr Tower’s experiments were carried out at nearly constant temperature. The more recent experiments of Lasche (Zeitsch, Verein Deutsche Ingen., 1902, 46, 1881) show that the product of the coefficient of friction, the load on the bearing, and the temperature is approximately constant. For further information on this point and on Osborne Reynolds’s theory of lubrication see Bearings and Lubrication.
§ 99. Work of Friction. Moment of Friction.—The work performed in a unit of time in overcoming the friction of a pair of surfaces is the product of the friction by the velocity of sliding of the surfaces over each other, if that is the same throughout the whole extent of the rubbing surfaces. If that velocity is different for different portions of the rubbing surfaces, the velocity of each portion is to be multiplied by the friction of that portion, and the results summed or integrated.
When the relative motion of the rubbing surfaces is one of rotation, the work of friction in a unit of time, for a portion of the rubbing surfaces at a given distance from the axis of rotation, may be found by multiplying together the friction of that portion, its distance from the axis, and the angular velocity. The product of the force of friction by the distance at which it acts from the axis of rotation is called the moment of friction. The total moment of friction of a pair of rotating rubbing surfaces is the sum or integral of the moments of friction of their several portions.
To express this symbolically, let du represent the area of a portion of a pair of rubbing surfaces at a distance r from the axis of their relative rotation; p the intensity of the normal pressure at du per unit of area; and ƒ the coefficient of friction. Then the moment of friction of du is ƒpr du;
the total moment of friction is ƒ ∫ pr·du;
and the work performed in a unit cf time in overcoming friction, when the angular velocity is α, is αƒ ∫ pr·du.
It is evident that the moment of friction, and the work lost by being performed in overcoming friction, are less in a rotating piece as the bearings are of smaller radius. But a limit is put to the diminution of the radii of journals and pivots by the conditions of durability and of proper lubrication, and also by conditions of strength and stiffness.
§ 100. Total Pressure between Journal and Bearing.—A single piece rotating with a uniform velocity has four mutually balanced forces applied to it: (l) the effort exerted on it by the piece which drives it; (2) the resistance of the piece which follows it—which may be considered for the purposes of the present question as useful resistance; (3) its weight; and (4) the reaction of its own cylindrical bearings. There are given the following data:—
The direction of the effort.
The direction of the useful resistance.
The weight of the piece and the direction in which it acts.
The magnitude of the useful resistance.
The radius of the bearing r.
The angle of repose φ, corresponding to the friction of the journal on the bearing.
And there are required the following:—
The direction of the reaction of the bearing.
The magnitude of that reaction.
The magnitude of the effort.
Let the useful resistance and the weight of the piece be compounded by the principles of statics into one force, and let this be called the given force.
 |
| Fig. 128. |
The directions of the effort and of the given force are either parallel or meet in a point. If they are parallel, the direction of the reaction of the bearing is also parallel to them; if they meet in a point, the direction of the reaction traverses the same point.
Also, let AAA, fig. 128, be a section of the bearing, and C its axis; then the direction of the reaction, at the point where it intersects the circle AAA, must make the angle φ with the radius of that circle; that is to say, it must be a line such as PT touching the smaller circle BB, whose radius is r · sin φ. The side on which it touches that circle is determined by the fact that the obliquity of the reaction is such as to oppose the rotation.
Thus is determined the direction of the reaction of the bearing; and the magnitude of that reaction and of the effort are then found by the principles of the equilibrium of three forces already stated in § 7.
The work lost in overcoming the friction of the bearing is the same as that which would be performed in overcoming at the circumference of the small circle BB a resistance equal to the whole pressure between the journal and bearing.
In order to diminish that pressure to the smallest possible amount, the effort, and the resultant of the useful resistance, and the weight of the piece (called above the “given force”) ought to be opposed to each other as directly as is practicable consistently with the purposes of the machine.
An investigation of the forces acting on a bearing and journal lubricated by an oil bath will be found in a paper by Osborne Reynolds in the Phil. Trans. pt. i. (1886). (See also Bearings.)
§ 101. Friction of Pivots and Collars.—When a shaft is acted upon by a force tending to shift it lengthways, that force must be balanced by the reaction of a bearing against a pivot at the end of the shaft; or, if that be impossible, against one or more collars, or rings projecting from the body of the shaft. The bearing of the pivot is called a step or footstep. Pivots require great hardness, and are usually made of steel. The flat pivot is a cylinder of steel having a plane circular end as a rubbing surface. Let N be the total pressure sustained by a flat pivot of the radius r; if that pressure be uniformly distributed, which is the case when the rubbing surfaces of the pivot and its step are both true planes, the intensity of the pressure is
p = N / πr2;
and, introducing this value into equation 59, the moment of friction of the flat pivot is found to be
2⁄3ƒNr
or two-thirds of that of a cylindrical journal of the same radius under the same normal pressure.
The friction of a conical pivot exceeds that of a flat pivot of the same radius, and under the same pressure, in the proportion of the side of the cone to the radius of its base.
The moment of friction of a collar is given by the formula—
| 2⁄3 ƒN | r3 − r′3 | , |
| r2 − r′2 |
where r is the external and r′ the internal radius.
 |
| Fig. 129. |
In the cup and ball pivot the end of the shaft and the step present two recesses facing each other, into which art fitted two shallow cups of steel or hard bronze. Between the concave spherical surfaces of those cups is placed a steel ball, being either a complete sphere or a lens having convex surfaces of a somewhat less radius than the concave surfaces of the cups. The moment of friction of this pivot is at first almost inappreciable from the extreme smallness of the radius of the circles of contact of the ball and cups, but, as they wear, that radius and the moment of friction increase.
It appears that the rapidity with which a rubbing surface wears away is proportional to the friction and to the velocity jointly, or nearly so. Hence the pivots already mentioned wear unequally at different points, and tend to alter their figures. Schiele has invented a pivot which preserves its original figure by wearing equally at all points in a direction parallel to its axis. The following are the principles on which this equality of wear depends:—
The rapidity of wear of a surface measured in an oblique direction is to the rapidity of wear measured normally as the secant of the obliquity is to unity. Let OX (fig. 129) be the axis of a pivot, and let RPC be a portion of a curve such that at any point P the secant of the obliquity to the normal of the curve of a line parallel to the axis is inversely proportional to the ordinate PY, to which the velocity of P is proportional. The rotation of that curve round OX will generate the form of pivot required. Now let PT be a tangent to the curve at P, cutting OX in T; PT = PY × secant obliquity, and this is to be a constant quantity; hence the curve is that known as the tractory of the straight line OX, in which PT = OR = constant. This curve is described by having a fixed straight edge parallel to OX, along which slides a slider carrying a pin whose centre is T. On that pin turns an arm, carrying at a point P a tracing-point, pencil or pen. Should the pen have a nib of two jaws, like those of an ordinary drawing-pen, the plane of the jaws must pass through PT. Then, while T is slid along the axis from O towards X, P will be drawn after it from R towards C along the tractory. This curve, being an asymptote to its axis, is capable of being indefinitely prolonged towards X; but in designing pivots it should stop before the angle PTY becomes less than the angle of repose of the rubbing surfaces, otherwise the pivot will be liable to stick in its bearing. The moment of friction of “Schiele’s anti-friction pivot,” as it is called, is equal to that of a cylindrical journal of the radius OR = PT the constant tangent, under the same pressure.
Records of experiments on the friction of a pivot bearing will be found in the Proc. Inst. Mech. Eng. (1891), and on the friction of a collar bearing ib. May 1888.
§ 102. Friction of Teeth.—Let N be the normal pressure exerted between a pair of teeth of a pair of wheels; s the total distance through which they slide upon each other; n the number of pairs of teeth which pass the plane of axis in a unit of time; then
nƒNs
is the work lost in unity of time by the friction of the teeth. The sliding s is composed of two parts, which take place during the approach and recess respectively. Let those be denoted by s1 and s2, so that s = s1 + s2. In § 45 the velocity of sliding at any instant has been given, viz. u = c (α1 + α2), where u is that velocity, c the distance T1 at any instant from the point of contact of the teeth to the pitch-point, and α1, α2 the respective angular velocities of the wheels.
Let v be the common velocity of the two pitch-circles, r1, r2, their radii; then the above equation becomes
| u = cv ( | 1 | + | 1 | ). |
| r1 | r2 |
To apply this to involute teeth, let c1 be the length of the approach, c2 that of the recess, u1, the mean volocity of sliding during the approach, u2 that during the recess; then
| u1 = | c1v | ( | 1 | + | 1 | ); u2 = | c2v | ( | 1 | + | 1 | ) |
| 2 | r1 | r2 | 2 | r1 | r2 |
also, let θ be the obliquity of the action; then the times occupied by the approach and recess are respectively
| c1 | , | c2 | ; |
| v cos θ | v cos θ |
giving, finally, for the length of sliding between each pair of teeth,
| s = s1 + s2 = | c12 + c22 | ( | 1 | + | 1 | ) |
| 2 cos θ | r1 | r2 |
which, substituted in equation (63), gives the work lost in a unit of time by the friction of involute teeth. This result, which is exact for involute teeth, is approximately true for teeth of any figure.
For inside gearing, if r1 be the less radius and r2 the greater, 1/r1 − 1/r2 is to be substituted for 1/r1 + 1/r2.
§ 103. Friction of Cords and Belts.—A flexible band, such as a cord, rope, belt or strap, may be used either to exert an effort or a resistance upon a pulley round which it wraps. In either case the tangential force, whether effort or resistance, exerted between the band and the pulley is their mutual friction, caused by and proportional to the normal pressure between them.
Let T1 be the tension of the free part of the band at that side towards which it tends to draw the pulley, or from which the pulley tends to draw it; T2 the tension of the free part at the other side; T the tension of the band at any intermediate point of its arc of contact with the pulley; θ the ratio of the length of that arc to the radius of the pulley; dθ the ratio of an indefinitely small element of that arc to the radius; F = T1 − T2 the total friction between the band and the pulley; dF the elementary portion of that friction due to the elementary arc dθ; ƒ the coefficient of friction between the materials of the band and pulley.
Then, according to a well-known principle in statics, the normal pressure at the elementary arc dθ is T dθ, T being the mean tension of the band at that elementary arc; consequently the friction on that arc is dF = ƒT dθ. Now that friction is also the difference 1013 between the tensions of the band at the two ends of the elementary arc, or dT = dF = ƒT dθ; which equation, being integrated throughout the entire arc of contact, gives the following formulae:—
| hyp log. | T1 | = ƒθ |
| T2 |
| T1 | = eƒθ |
| T2 |
F = T1 − T2 = T1 (1 − e − ƒθ) = T2 (eƒθ − 1)
When a belt connecting a pair of pulleys has the tensions of its two sides originally equal, the pulleys being at rest, and when the pulleys are next set in motion, so that one of them drives the other by means of the belt, it is found that the advancing side of the belt is exactly as much tightened as the returning side is slackened, so that the mean tension remains unchanged. Its value is given by this formula—
| T1 + T2 | = | eƒθ + 1 |
| 2 | 2 (eƒθ − 1) |
which is useful in determining the original tension required to enable a belt to transmit a given force between two pulleys.
The equations 65 and 66 are applicable to a kind of brake called a friction-strap, used to stop or moderate the velocity of machines by being tightened round a pulley. The strap is usually of iron, and the pulley of hard wood.
Let α denote the arc of contact expressed in turns and fractions of a turn; then
θ = 6.2832a
eƒθ = number whose common logarithm is 2.7288ƒa
See also Dynamometer for illustrations of the use of what are essentially friction-straps of different forms for the measurement of the brake horse-power of an engine or motor.
§ 104. Stiffness of Ropes.—Ropes offer a resistance to being bent, and, when bent, to being straightened again, which arises from the mutual friction of their fibres. It increases with the sectional area of the rope, and is inversely proportional to the radius of the curve into which it is bent.
The work lost in pulling a given length of rope over a pulley is found by multiplying the length of the rope in feet by its stiffness in pounds, that stiffness being the excess of the tension at the leading side of the rope above that at the following side, which is necessary to bend it into a curve fitting the pulley, and then to straighten it again.
The following empirical formulae for the stiffness of hempen ropes have been deduced by Morin from the experiments of Coulomb:—
Let F be the stiffness in pounds avoirdupois; d the diameter of the rope in inches, n = 48d2 for white ropes and 35d2 for tarred ropes; r the effective radius of the pulley in inches; T the tension in pounds. Then
| For white ropes, F = | n | (0.0012 + 0.001026n + 0.0012T). |
| r |
| For tarred ropes, F = | n | (0.006 + 0.001392n + 0.00168T). |
| r |
§ 105. Friction-Couplings.—Friction is useful as a means of communicating motion where sudden changes either of force or velocity take place, because, being limited in amount, it may be so adjusted as to limit the forces which strain the pieces of the mechanism within the bounds of safety. Amongst contrivances for effecting this object are friction-cones. A rotating shaft carries upon a cylindrical portion of its figure a wheel or pulley turning loosely on it, and consequently capable of remaining at rest when the shaft is in motion. This pulley has fixed to one side, and concentric with it, a short frustum of a hollow cone. At a small distance from the pulley the shaft carries a short frustum of a solid cone accurately turned to fit the hollow cone. This frustum is made always to turn along with the shaft by being fitted on a square portion of it, or by means of a rib and groove, or otherwise, but is capable of a slight longitudinal motion, so as to be pressed into, or withdrawn from, the hollow cone by means of a lever. When the cones are pressed together or engaged, their friction causes the pulley to rotate along with the shaft; when they are disengaged, the pulley is free to stand still. The angle made by the sides of the cones with the axis should not be less than the angle of repose. In the friction-clutch, a pulley loose on a shaft has a hoop or gland made to embrace it more or less tightly by means of a screw; this hoop has short projecting arms or ears. A fork or clutch rotates along with the shaft, and is capable of being moved longitudinally by a handle. When the clutch is moved towards the hoop, its arms catch those of the hoop, and cause the hoop to rotate and to communicate its rotation to the pulley by friction. There are many other contrivances of the same class, but the two just mentioned may serve for examples.
§ 106. Heat of Friction: Unguents.—The work lost in friction is employed in producing heat. This fact is very obvious, and has been known from a remote period; but the exact determination of the proportion of the work lost to the heat produced, and the experimental proof that that proportion is the same under all circumstances and with all materials, solid, liquid and gaseous, are comparatively recent achievements of J. P. Joule. The quantity of work which produces a British unit of heat (or so much heat as elevates the temperature of one pound of pure water, at or near ordinary atmospheric temperatures, by 1° F.) is 772 foot-pounds. This constant, now designated as “Joule’s equivalent,” is the principal experimental datum of the science of thermodynamics.
A more recent determination (Phil. Trans., 1897), by Osborne Reynolds and W. M. Moorby, gives 778 as the mean value of Joule’s equivalent through the range of 32° to 212° F. See also the papers of Rowland in the Proc. Amer. Acad. (1879), and Griffiths, Phil. Trans. (1893).
The heat produced by friction, when moderate in amount, is useful in softening and liquefying thick unguents; but when excessive it is prejudicial, by decomposing the unguents, and sometimes even by softening the metal of the bearings, and raising their temperature so high as to set fire to neighbouring combustible matters.
Excessive heating is prevented by a constant and copious supply of a good unguent. The elevation of temperature produced by the friction of a journal is sometimes used as an experimental test of the quality of unguents. For modern methods of forced lubrication see Bearings.
§ 107. Rolling Resistance.—By the rolling of two surfaces over each other without sliding a resistance is caused which is called sometimes “rolling friction,” but more correctly rolling resistance. It is of the nature of a couple, resisting rotation. Its moment is found by multiplying the normal pressure between the rolling surfaces by an arm, whose length depends on the nature of the rolling surfaces, and the work lost in a unit of time in overcoming it is the product of its moment by the angular velocity of the rolling surfaces relatively to each other. The following are approximate values of the arm in decimals of a foot:—
| Oak upon oak | 0.006 (Coulomb). |
| Lignum vitae on oak | 0.004 ” |
| Cast iron on cast iron | 0.002 (Tredgold). |
§ 108. Reciprocating Forces: Stored and Restored Energy.—When a force acts on a machine alternately as an effort and as a resistance, it may be called a reciprocating force. Of this kind is the weight of any piece in the mechanism whose centre of gravity alternately rises and falls; for during the rise of the centre of gravity that weight acts as a resistance, and energy is employed in lifting it to an amount expressed by the product of the weight into the vertical height of its rise; and during the fall of the centre of gravity the weight acts as an effort, and exerts in assisting to perform the work of the machine an amount of energy exactly equal to that which had previously been employed in lifting it. Thus that amount of energy is not lost, but has its operation deferred; and it is said to be stored when the weight is lifted, and restored when it falls.
In a machine of which each piece is to move with a uniform velocity, if the effort and the resistance be constant, the weight of each piece must be balanced on its axis, so that it may produce lateral pressure only, and not act as a reciprocating force. But if the effort and the resistance be alternately in excess, the uniformity of speed may still be preserved by so adjusting some moving weight in the mechanism that when the effort is in excess it may be lifted, and so balance and employ the excess of effort, and that when the resistance is in excess it may fall, and so balance and overcome the excess of resistance—thus storing the periodical excess of energy and restoring that energy to perform the periodical excess of work.
Other forces besides gravity may be used as reciprocating forces for storing and restoring energy—for example, the elasticity of a spring or of a mass of air.
In most of the delusive machines commonly called “perpetual motions,” of which so many are patented in each year, and which are expected by their inventors to perform work without receiving energy, the fundamental fallacy consists in an expectation that some reciprocating force shall restore more energy than it has been the means of storing.
Division 2. Deflecting Forces.
§ 109. Deflecting Force for Translation in a Curved Path.—In machinery, deflecting force is supplied by the tenacity of some piece, such as a crank, which guides the deflected body in its curved path, and is unbalanced, being employed in producing deflexion, and not in balancing another force.
§ 110. Centrifugal Force of a Rotating Body.—The centrifugal force exerted by a rotating body on its axis of rotation is the same in magnitude as if the mass of the body were concentrated at its centre of gravity, and acts in a plane passing through the axis of rotation and the centre of gravity of the body.
The particles of a rotating body exert centrifugal forces on each other, which strain the body, and tend to tear it asunder, but these forces balance each other, and do not affect the resultant centrifugal force exerted on the axis of rotation.3
If the axis of rotation traverses the centre of gravity of the body, the centrifugal force exerted on that axis is nothing.
Hence, unless there be some reason to the contrary, each piece of a machine should be balanced on its axis of rotation; otherwise the 1014 centrifugal force will cause strains, vibration and increased friction, and a tendency of the shafts to jump out of their bearings.
§ 111. Centrifugal Couples of a Rotating Body.—Besides the tendency (if any) of the combined centrifugal forces of the particles of a rotating body to shift the axis of rotation, they may also tend to turn it out of its original direction. The latter tendency is called a centrifugal couple, and vanishes for rotation about a principal axis.
It is essential to the steady motion of every rapidly rotating piece in a machine that its axis of rotation should not merely traverse its centre of gravity, but should be a permanent axis; for otherwise the centrifugal couples will increase friction, produce oscillation of the shaft and tend to make it leave its bearings.
The principles of this and the preceding section are those which regulate the adjustment of the weight and position of the counterpoises which are placed between the spokes of the driving-wheels of locomotive engines.
 |
| (From Balancing of Engines, by permission of Edward Arnold.) |
| Fig. 130. |
§ 112.* Method of computing the position and magnitudes of balance weights which must be added to a given system of arbitrarily chosen rotating masses in order to make the common axis of rotation a permanent axis.—The method here briefly explained is taken from a paper by W. E. Dalby, “The Balancing of Engines with special reference to Marine Work,” Trans. Inst. Nav. Arch. (1899). Let the weight (fig. 130), attached to a truly turned disk, be rotated by the shaft OX, and conceive that the shaft is held in a bearing at one point, O. The force required to constrain the weight to move in a circle, that is the deviating force, produces an equal and opposite reaction on the shaft, whose amount F is equal to the centrifugal force Wa2r/g ℔, where r is the radius of the mass centre of the weight, and a is its angular velocity in radians per second. Transferring this force to the point O, it is equivalent to, (1) a force at O equal and parallel to F, and, (2) a centrifugal couple of Fa foot-pounds. In order that OX may be a permanent axis it is necessary that there should be a sufficient number of weights attached to the shaft and so distributed that when each is referred to the point O
(1) ΣF = 0
(2) ΣFa = 0
The plane through O to which the shaft is perpendicular is called the reference plane, because all the transferred forces act in that plane at the point O. The plane through the radius of the weight containing the axis OX is called the axial plane because it contains the forces forming the couple due to the transference of F to the reference plane. Substituting the values of F in (a) the two conditions become
| (1) (W1r1 + W2r2 + W3r3 + ...) | α2 | = 0 |
| g |
| (2) (W1a1r1 + W2a2r2 + ... ) | α2 | = 0 |
| g |
In order that these conditions may obtain, the quantities in the brackets must be zero, since the factor α2/g is not zero. Hence finally the conditions which must be satisfied by the system of weights in order that the axis of rotation may be a permanent axis is
| (1) (W1r1 + W2r2 + W3r3) = 0 |
| (2) (W1a1r1 + W2a2r2 + W3a3r3) = 0 |
It must be remembered that these are all directed quantities, and that their respective sums are to be taken by drawing vector polygons. In drawing these polygons the magnitude of the vector of the type Wr is the product Wr, and the direction of the vector is from the shaft outwards towards the weight W, parallel to the radius r. For the vector representing a couple of the type War, if the masses are all on the same side of the reference plane, the direction of drawing is from the axis outwards; if the masses are some on one side of the reference plane and some on the other side, the direction of drawing is from the axis outwards towards the weight for all masses on the one side, and from the mass inwards towards the axis for all weights on the other side, drawing always parallel to the direction defined by the radius r. The magnitude of the vector is the product War. The conditions (c) may thus be expressed: first, that the sum of the vectors Wr must form a closed polygon, and, second, that the sum of the vectors War must form a closed polygon. The general problem in practice is, given a system of weights attached to a shaft, to find the respective weights and positions of two balance weights or counterpoises which must be added to the system in order to make the shaft a permanent axis, the planes in which the balance weights are to revolve also being given. To solve this the reference plane must be chosen so that it coincides with the plane of revolution of one of the as yet unknown balance weights. The balance weight in this plane has therefore no couple corresponding to it. Hence by drawing a couple polygon for the given weights the vector which is required to close the polygon is at once found and from it the magnitude and position of the balance weight which must be added to the system to balance the couples follow at once. Then, transferring the product Wr corresponding with this balance weight to the reference plane, proceed to draw the force polygon. The vector required to close it will determine the second balance weight, the work may be checked by taking the reference plane to coincide with the plane of revolution of the second balance weight and then re-determining them, or by taking a reference plane anywhere and including the two balance weights trying if condition (c) is satisfied.
When a weight is reciprocated, the equal and opposite force required for its acceleration at any instant appears as an unbalanced force on the frame of the machine to which the weight belongs. In the particular case, where the motion is of the kind known as “simple harmonic” the disturbing force on the frame due to the reciprocation of the weight is equal to the component of the centrifugal force in the line of stroke due to a weight equal to the reciprocated weight supposed concentrated at the crank pin. Using this principle the method of finding the balance weights to be added to a given system of reciprocating weights in order to produce a system of forces on the frame continuously in equilibrium is exactly the same as that just explained for a system of revolving weights, because for the purpose of finding the balance weights each reciprocating weight may be supposed attached to the crank pin which operates it, thus forming an equivalent revolving system. The balance weights found as part of the equivalent revolving system when reciprocated by their respective crank pins form the balance weights for the given reciprocating system. These conditions may be exactly realized by a system of weights reciprocated by slotted bars, the crank shaft driving the slotted bars rotating uniformly. In practice reciprocation is usually effected through a connecting rod, as in the case of steam engines. In balancing the mechanism of a steam engine it is often sufficiently accurate to consider the motion of the pistons as simple harmonic, and the effect on the framework of the acceleration of the connecting rod may be approximately allowed for by distributing the weight of the rod between the crank pin and the piston inversely as the centre of gravity of the rod divides the distance between the centre of the cross head pin and the centre of the crank pin. The moving parts of the engine are then divided into two complete and independent systems, namely, one system of revolving weights consisting of crank pins, crank arms, &c., attached to and revolving with the crank shaft, and a second system of reciprocating weights consisting of the pistons, cross-heads, &c., supposed to be moving each in its line of stroke with simple harmonic motion. The balance weights are to be separately calculated for each system, the one set being added to the crank shaft as revolving weights, and the second set being included with the reciprocating weights and operated by a properly placed crank on the crank shaft. Balance weights added in this way to a set of reciprocating weights are sometimes called bob-weights. In the case of locomotives the balance weights required to balance the pistons are added as revolving weights to the crank shaft system, and in fact are generally combined with the weights required to balance the revolving system so as to form one weight, the counterpoise referred to in the preceding section, which is seen between the spokes of the wheels of a locomotive. Although this method balances the pistons in the horizontal plane, and thus allows the pull of the engine on the train to be exerted without the variation due to the reciprocation of the pistons, yet the force balanced horizontally is introduced vertically and appears as a variation of pressure on the rail. In practice about two-thirds of the reciprocating weight is balanced in order to keep this variation of rail pressure within safe limits. The assumption that the pistons of an engine move with simple harmonic motion is increasingly erroneous as the ratio of the length of the crank r, to the length of the connecting rod l increases. A more accurate though still approximate expression for the force on the frame due to the acceleration of the piston whose weight is W is given by
| W | ω2r { cos θ + | r | cos 2θ } |
| g | l |
The conditions regulating the balancing of a system of weights reciprocating under the action of accelerating forces given by the above expression are investigated in a paper by Otto Schlick, “On Balancing of Steam Engines,” Trans, Inst. Nav. Arch. (1900), and in a paper by W. E. Dalby, “On the Balancing of the Reciprocating Parts of Engines, including the Effect of the Connecting Rod” (ibid., 1901). A still more accurate expression than the above is obtained by expansion in a Fourier series, regarding which and its bearing on balancing engines see a paper by J. H. Macalpine, “A Solution of the Vibration Problem” (ibid., 1901). The whole subject is dealt with in a treatise, The Balancing of Engines, by W. E. Dalby (London, 1906). Most of the original papers on this subject of engine balancing are to be found in the Transactions of the Institution of Naval Architects.
§ 113.* Centrifugal Whirling of Shafts.—When a system of revolving masses is balanced so that the conditions of the preceding section are fulfilled, the centre of gravity of the system lies on the axis of revolution. If there is the slightest displacement of the centre of gravity of the system from the axis of revolution a force acts on the shaft tending to deflect it, and varies as the deflexion and as the square of the speed. If the shaft is therefore to revolve stably, this force must be balanced at any instant by the elastic resistance of the shaft to deflexion. To take a simple case, suppose a shaft, 1015 supported on two bearings to carry a disk of weight W at its centre, and let the centre of gravity of the disk be at a distance e from the axis of rotation, this small distance being due to imperfections of material or faulty construction. Neglecting the mass of the shaft itself, when the shaft rotates with an angular velocity a, the centrifugal force Wa2e/g will act upon the shaft and cause its axis to deflect from the axis of rotation a distance, y say. The elastic resistance evoked by this deflexion is proportional to the deflexion, so that if c is a constant depending upon the form, material and method of support of the shaft, the following equality must hold if the shaft is to rotate stably at the stated speed—
| W | (y + e) a2 = cy, |
| g |
from which y = Wa2e / (gc − Wa2).
This expression shows that as a increases y increases until when Wa2 = gc, y becomes infinitely large. The corresponding value of a, namely √(gc/W), is called the critical velocity of the shaft, and is the speed at which the shaft ceases to rotate stably and at which centrifugal whirling begins. The general problem is to find the value of a corresponding to all kinds of loadings on shafts supported in any manner. The question was investigated by Rankine in an article in the Engineer (April 9, 1869). Professor A. G. Greenhill treated the problem of the centrifugal whirling of an unloaded shaft with different supporting conditions in a paper “On the Strength of Shafting exposed both to torsion and to end thrust,” Proc. Inst. Mech. Eng. (1883). Professor S. Dunkerley (“On the Whirling and Vibration of Shafts,” Phil. Trans., 1894) investigated the question for the cases of loaded and unloaded shafts, and, owing to the complication arising from the application of the general theory to the cases of loaded shafts, devised empirical formulae for the critical speeds of shafts loaded with heavy pulleys, based generally upon the following assumption, which is stated for the case of a shaft carrying one pulley: If N1, N2 be the separate speeds of whirl of the shaft and pulley on the assumption that the effect of one is neglected when that of the other is under consideration, then the resulting speed of whirl due to both causes combined may be taken to be of the form N1N2 √(N21 + N12) where N means revolutions per minute. This form is extended to include the cases of several pulleys on the same shaft. The interesting and important part of the investigation is that a number of experiments were made on small shafts arranged in different ways and loaded in different ways, and the speed at which whirling actually occurred was compared with the speed calculated from formulae of the general type indicated above. The agreement between the observed and calculated values of the critical speeds was in most cases quite remarkable. In a paper by Dr C. Chree, “The Whirling and Transverse Vibrations of Rotating Shafts,” Proc. Phys. Soc. Lon., vol. 19 (1904); also Phil. Mag., vol. 7 (1904), the question is investigated from a new mathematical point of view, and expressions for the whirling of loaded shafts are obtained without the necessity of any assumption of the kind stated above. An elementary presentation of the problem from a practical point of view will be found in Steam Turbines, by Dr A. Stodola (London, 1905).
 |
| Fig. 131. |
§ 114. Revolving Pendulum. Governors.—In fig. 131 AO represents an upright axis or spindle; B a weight called a bob, suspended by rod OB from a horizontal axis at O, carried by the vertical axis. When the spindle is at rest the bob hangs close to it; when the spindle rotates, the bob, being made to revolve round it, diverges until the resultant of the centrifugal force and the weight of the bob is a force acting at O in the direction OB, and then it revolves steadily in a circle. This combination is called a revolving, centrifugal, or conical pendulum. Revolving pendulums are usually constructed with pairs of rods and bobs, as OB, Ob, hung at opposite sides of the spindle, that the centrifugal forces exerted at the point O may balance each other.
In finding the position in which the bob will revolve with a given angular velocity, a, for most practical cases connected with machinery the mass of the rod may be considered as insensible compared with that of the bob. Let the bob be a sphere, and from the centre of that sphere draw BH = y perpendicular to OA. Let OH = z; let W be the weight of the bob, F its centrifugal force. Then the condition of its steady revolution is W : F :: z : y; that is to say, y/z = F/W = yα2/g; consequently
z = g/α2
Or, if n = α 2π = α/6.2832 be the number of turns or fractions of a turn in a second,
| z = | g | = | 0.8165 ft. | = | 9.79771 in. |
| 4π2n2 | n2 | n2 |
z is called the altitude of the pendulum.
 |
| Fig. 132. |
If the rod of a revolving pendulum be jointed, as in fig. 132, not to a point in the vertical axis, but to the end of a projecting arm C, the position in which the bob will revolve will be the same as if the rod were jointed to the point O, where its prolongation cuts the vertical axis.
A revolving pendulum is an essential part of most of the contrivances called governors, for regulating the speed of prime movers, for further particulars of which see Steam Engine.
Division 3. Working of Machines of Varying Velocity.
§ 115. General Principles.—In order that the velocity of every piece of a machine may be uniform, it is necessary that the forces acting on each piece should be always exactly balanced. Also, in order that the forces acting on each piece of a machine may be always exactly balanced, it is necessary that the velocity of that piece should be uniform.
An excess of the effort exerted on any piece, above that which is necessary to balance the resistance, is accompanied with acceleration; a deficiency of the effort, with retardation.
When a machine is being started from a state of rest, and brought by degrees up to its proper speed, the effort must be in excess; when it is being retarded for the purpose of stopping it, the resistance must be in excess.
An excess of effort above resistance involves an excess of energy exerted above work performed; that excess of energy is employed in producing acceleration.
An excess of resistance above effort involves an excess of work performed above energy expended; that excess of work is performed by means of the retardation of the machinery.
When a machine undergoes alternate acceleration and retardation, so that at certain instants of time, occurring at the end of intervals called periods or cycles, it returns to its original speed, then in each of those periods or cycles the alternate excesses of energy and of work neutralize each other; and at the end of each cycle the principle of the equality of energy and work stated in § 87, with all its consequences, is verified exactly as in the case of machines of uniform speed.
At intermediate instants, however, other principles have also to be taken into account, which are deduced from the second law of motion, as applied to direct deviation, or acceleration and retardation.
§ 116. Energy of Acceleration and Work of Retardation for a Shifting Body.—Let w be the weight of a body which has a motion of translation in any path, and in the course of the interval of time Δt let its velocity be increased at a uniform rate of acceleration from v1 to v2. The rate of acceleration will be
dv/dt = const. = (v2 − v1) Δt;
and to produce this acceleration a uniform effort will be required, expressed by
P = w (v2 − v1) gΔt
(The product wv/g of the mass of a body by its velocity is called its momentum; so that the effort required is found by dividing the increase of momentum by the time in which it is produced.)
To find the energy which has to be exerted to produce the acceleration from v1 to v2, it is to be observed that the distance through which the effort P acts during the acceleration is
Δs = (v2 + v1) Δt/2;
consequently, the energy of acceleration is
PΔs = w (v2 − v1) (v2 + v1) / 2g = w (v22 − v12) 2g,
being proportional to the increase in the square of the velocity, and independent of the time.
In order to produce a retardation from the greater velocity v2 to the less velocity v1, it is necessary to apply to the body a resistance connected with the retardation and the time by an equation identical in every respect with equation (71), except by the substitution of a resistance for an effort; and in overcoming that resistance the body performs work to an amount determined by equation (72), putting Rds for Pas.
§ 117. Energy Stored and Restored by Deviations of Velocity.—Thus a body alternately accelerated and retarded, so as to be brought back to its original speed, performs work during its retardation exactly equal in amount to the energy exerted upon it during its acceleration; so that that energy may be considered as stored during the acceleration, and restored during the retardation, in a manner analogous to the operation of a reciprocating force (§ 108).
Let there be given the mean velocity V = 1⁄2 (v2 + v1) of a body whose weight is w, and let it be required to determine the fluctuation of velocity v2 − v1, and the extreme velocities v1, v2, which that body must have, in order alternately to store and restore an amount of energy E. By equation (72) we have
E = w (v22 − v12) / 2g
which, being divided by V = 1⁄2(v2 + v1), gives
E/V = w (v2 − v1) / g;
and consequently
v2 − v1 = gE / Vw
The ratio of this fluctuation to the mean velocity, sometimes called the unsteadiness of the motion of the body, is
(v2 − v1) V = gE / V2w.
§ 118. Actual Energy of a Shifting Body.—The energy which must be exerted on a body of the weight w, to accelerate it from a state of rest up to a given velocity of translation v, and the equal amount of work which that body is capable of performing by overcoming resistance while being retarded from the same velocity of translation v to a state of rest, is
wv2 / 2g.
This is called the actual energy of the motion of the body, and is half the quantity which in some treatises is called vis viva.
The energy stored or restored, as the case may be, by the deviations of velocity of a body or a system of bodies, is the amount by which the actual energy is increased or diminished.
§ 119. Principle of the Conservation of Energy in Machines.—The following principle, expressing the general law of the action of machines with a velocity uniform or varying, includes the law of the equality of energy and work stated in § 89 for machines of uniform speed.
In any given interval during the working of a machine, the energy exerted added to the energy restored is equal to the energy stored added to the work performed.
§ 120. Actual Energy of Circular Translation—Moment of Inertia.—Let a small body of the weight w undergo translation in a circular path of the radius ρ, with the angular velocity of deflexion α, so that the common linear velocity of all its particles is v = αρ. Then the actual energy of that body is
wv2 / 2g = wa2ρ2 / 2g.
By comparing this with the expression for the centrifugal force (wa2ρ/g), it appears that the actual energy of a revolving body is equal to the potential energy Fρ/2 due to the action of the deflecting force along one-half of the radius of curvature of the path of the body.
The product wρ2/g, by which the half-square of the angular velocity is multiplied, is called the moment of inertia of the revolving body.
§ 121. Flywheels.—A flywheel is a rotating piece in a machine, generally shaped like a wheel (that is to say, consisting of a rim with spokes), and suited to store and restore energy by the periodical variations in its angular velocity.
The principles according to which variations of angular velocity store and restore energy are the same as those of § 117, only substituting moment of inertia for mass, and angular for linear velocity.
Let W be the weight of a flywheel, R its radius of gyration, a2 its maximum, a1 its minimum, and A = 1⁄2 (α2 + α1) its mean angular velocity. Let
I/S = (α2 − α2) / A
denote the unsteadiness of the motion of the flywheel; the denominator S of this fraction is called the steadiness. Let e denote the quantity by which the energy exerted in each cycle of the working of the machine alternately exceeds and falls short of the work performed, and which has consequently to be alternately stored by acceleration and restored by retardation of the flywheel. The value of this periodical excess is—
e = R2W (α22 − α12), 2g,
from which, dividing both sides by A2, we obtain the following equations:—
e / A2 = R2W / gS
R2WA2 / 2g = Se / 2.
The latter of these equations may be thus expressed in words: The actual energy due to the rotation of the fly, with its mean angular velocity, is equal to one-half of the periodical excess of energy multiplied by the steadiness.
In ordinary machinery S = about 32; in machinery for fine purposes S = from 50 to 60; and when great steadiness is required S = from 100 to 150.
The periodical excess e may arise either from variations in the effort exerted by the prime mover, or from variations in the resistance of the work, or from both these causes combined. When but one flywheel is used, it should be placed in as direct connexion as possible with that part of the mechanism where the greatest amount of the periodical excess originates; but when it originates at two or more points, it is best to have a flywheel in connexion with each of these points. For example, in a machine-work, the steam-engine, which is the prime mover of the various tools, has a flywheel on the crank-shaft to store and restore the periodical excess of energy arising from the variations in the effort exerted by the connecting-rod upon the crank; and each of the slotting machines, punching machines, riveting machines, and other tools has a flywheel of its own to store and restore energy, so as to enable the very different resistances opposed to those tools at different times to be overcome without too great unsteadiness of motion. For tools performing useful work at intervals, and having only their own friction to overcome during the intermediate intervals, e should be assumed equal to the whole work performed at each separate operation.
§ 122. Brakes.—A brake is an apparatus for stopping and diminishing the velocity of a machine by friction, such as the friction-strap already referred to in § 103. To find the distance s through which a brake, exerting the friction F, must rub in order to stop a machine having the total actual energy E at the moment when the brake begins to act, reduce, by the principles of § 96, the various efforts and other resistances of the machine which act at the same time with the friction of the brake to the rubbing surface of the brake, and let R be their resultant—positive if resistance, negative if effort preponderates. Then
s = E / (F + R).
§ 123. Energy distributed between two Bodies: Projection and Propulsion.—Hitherto the effort by which a machine is moved has been treated as a force exerted between a movable body and a fixed body, so that the whole energy exerted by it is employed upon the movable body, and none upon the fixed body. This conception is sensibly realized in practice when one of the two bodies between which the effort acts is either so heavy as compared with the other, or has so great a resistance opposed to its motion, that it may, without sensible error, be treated as fixed. But there are cases in which the motions of both bodies are appreciable, and must be taken into account—such as the projection of projectiles, where the velocity of the recoil or backward motion of the gun bears an appreciable proportion to the forward motion of the projectile; and such as the propulsion of vessels, where the velocity of the water thrown backward by the paddle, screw or other propeller bears a very considerable proportion to the velocity of the water moved forwards and sideways by the ship. In cases of this kind the energy exerted by the effort is distributed between the two bodies between which the effort is exerted in shares proportional to the velocities of the two bodies during the action of the effort; and those velocities are to each other directly as the portions of the effort unbalanced by resistance on the respective bodies, and inversely as the weights of the bodies.
To express this symbolically, let W1, W2 be the weights of the bodies; P the effort exerted between them; S the distance through which it acts; R1, R2 the resistances opposed to the effort overcome by W1, W2 respectively; E1, E2 the shares of the whole energy E exerted upon W1, W2 respectively. Then
| E | : | E1 | : | E2 | ||
| :: | W2 (P − R1) + W1 (P − R2) | : | P − R1 | : | P − R2 | . |
| W1W2 | W1 | W2 |
If R1 = R2, which is the case when the resistance, as well as the effort, arises from the mutual actions of the two bodies, the above becomes,
E : E1 : E2
:: W1 + W2 : W2 : W1,
that is to say, the energy is exerted on the bodies in shares inversely proportional to their weights; and they receive accelerations inversely proportional to their weights, according to the principle of dynamics, already quoted in a note to § 110, that the mutual actions of a system of bodies do not affect the motion of their common centre of gravity.
For example, if the weight of a gun be 160 times that of its ball 160⁄161 of the energy exerted by the powder in exploding will be employed in propelling the ball, and 1⁄161 in producing the recoil of the gun, provided the gun up to the instant of the ball’s quitting the muzzle meets with no resistance to its recoil except the friction of the ball.
§ 124. Centre of Percussion.—It is obviously desirable that the deviations or changes of motion of oscillating pieces in machinery should, as far as possible, be effected by forces applied at their centres of percussion.
If the deviation be a translation—that is, an equal change of motion of all the particles of the body—the centre of percussion is obviously the centre of gravity itself; and, according to the second law of motion, if dv be the deviation of velocity to be produced in the interval dt, and W the weight of the body, then
| P = | W | · | dv |
| g | dt |
is the unbalanced effort required.
If the deviation be a rotation about an axis traversing the centre of gravity, there is no centre of percussion; for such a deviation can only be produced by a couple of forces, and not by any single force. Let dα be the deviation of angular velocity to be produced in the interval dt, and I the moment of the inertia of the body about an axis through its centre of gravity; then 1⁄2Id(α2) = Iα dα is the variation of the body’s actual energy. Let M be the moment of the unbalanced couple required to produce the deviation; then by equation 57, § 104, the energy exerted by this couple in the interval dt is Mα dt, which, being equated to the variation of energy, gives
| M = I | dα | = | R2W | · | dα | . |
| dt | g | dt |
R is called the radius of gyration of the body with regard to an axis through its centre of gravity.
 |
| Fig. 133. |
Now (fig. 133) let the required deviation be a rotation of the body BB about an axis O, not traversing the centre of gravity G, dα 1017 being, as before, the deviation of angular velocity to be produced in the interval dt. A rotation with the angular velocity α about an axis O may be considered as compounded of a rotation with the same angular velocity about an axis drawn through G parallel to O and a translation with the velocity α. OG, OG being the perpendicular distance between the two axes. Hence the required deviation may be regarded as compounded of a deviation of translation dv = OG · dα, to produce which there would be required, according to equation (82), a force applied at G perpendicular to the plane OG—
| P = | W | · OG · | dα |
| g | dt |
and a deviation dα of rotation about an axis drawn through G parallel to O, to produce which there would be required a couple of the moment M given by equation (83). According to the principles of statics, the resultant of the force P, applied at G perpendicular to the plane OG, and the couple M is a force equal and parallel to P, but applied at a distance GC from G, in the prolongation of the perpendicular OG, whose value is
GC = M / P = R2 / OG.
Thus is determined the position of the centre of percussion C, corresponding to the axis of rotation O. It is obvious from this equation that, for an axis of rotation parallel to O traversing C, the centre of percussion is at the point where the perpendicular OG meets O.
§ 125.* To find the moment of inertia of a body about an axis through its centre of gravity experimentally.—Suspend the body from any conveniently selected axis O (fig. 48) and hang near it a small plumb bob. Adjust the length of the plumb-line until it and the body oscillate together in unison. The length of the plumb-line, measured from its point of suspension to the centre of the bob, is for all practical purposes equal to the length OC, C being therefore the centre of percussion corresponding to the selected axis O. From equation (85)
R2 = CG × OG = (OC − OG) OG.
The position of G can be found experimentally; hence OG is known, and the quantity R2 can be calculated, from which and the ascertained weight W of the body the moment of inertia about an axis through G, namely, W/g × R2, can be computed.
 |
| Fig. 134. |
§ 126.* To find the force competent to produce the instantaneous acceleration of any link of a mechanism.—In many practical problems it is necessary to know the magnitude and position of the forces acting to produce the accelerations of the several links of a mechanism. For a given link, this force is the resultant of all the accelerating forces distributed through the substance of the material of the link required to produce the requisite acceleration of each particle, and the determination of this force depends upon the principles of the two preceding sections. The investigation of the distribution of the forces through the material and the stress consequently produced belongs to the subject of the Strength of Materials (q.v.). Let BK (fig. 134) be any link moving in any manner in a plane, and let G be its centre of gravity. Then its motion may be analysed into (1) a translation of its centre of gravity; and (2) a rotation about an axis through its centre of gravity perpendicular to its plane of motion. Let α be the acceleration of the centre of gravity and let A be the angular acceleration about the axis through the centre of gravity; then the force required to produce the translation of the centre of gravity is F = Wα/g, and the couple required to produce the angular acceleration about the centre of gravity is M = IA/g, W and I being respectively the weight and the moment of inertia of the link about the axis through the centre of gravity. The couple M may be produced by shifting the force F parallel to itself through a distance x. such that Fx = M. When the link forms part of a mechanism the respective accelerations of two points in the link can be determined by means of the velocity and acceleration diagrams described in § 82, it being understood that the motion of one link in the mechanism is prescribed, for instance, in the steam-engine’s mechanism that the crank shall revolve uniformly. Let the acceleration of the two points B and K therefore be supposed known. The problem is now to find the acceleration α and A. Take any pole O (fig. 49), and set out Ob equal to the acceleration of B and Ok equal to the acceleration of K. Join bk and take the point g so that KG: GB = kg : gb. Og is then the acceleration of the centre of gravity and the force F can therefore be immediately calculated. To find the angular acceleration A, draw kt, bt respectively parallel to and at right angles to the link KB. Then tb represents the angular acceleration of the point B relatively to the point K and hence tb/KB is the value of A, the angular acceleration of the link. Its moment of inertia about G can be found experimentally by the method explained in § 125, and then the value of the couple M can be computed. The value of x is found immediately from the quotient M/F. Hence the magnitude F and the position of F relatively to the centre of gravity of the link, necessary to give rise to the couple M, are known, and this force is therefore the resultant force required.
 |
| Fig. 135. |
§ 127.* Alternative construction for finding the position of F relatively to the centre of gravity of the link.—Let B and K be any two points in the link which for greater generality are taken in fig. 135, so that the centre of gravity G is not in the line joining them. First find the value of R experimentally. Then produce the given directions of acceleration of B and K to meet in O; draw a circle through the three points B, K and O; produce the line joining O and G to cut the circle in Y; and take a point Z on the line OY so that YG × GZ = R2. Then Z is a point in the line of action of the force F. This useful theorem is due to G. T. Bennett, of Emmanuel College, Cambridge. A proof of it and three corollaries are given in appendix 4 of the second edition of Dalby’s Balancing of Engines (London, 1906). It is to be noticed that only the directions of the accelerations of two points are required to find the point Z.
For an example of the application of the principles of the two preceding sections to a practical problem see Valve and Valve Gear Mechanisms, by W. E. Dalby (London, 1906), where the inertia stresses brought upon the several links of a Joy valve gear, belonging to an express passenger engine of the Lancashire & Yorkshire railway, are investigated for an engine-speed of 68 m. an hour.
 |
| Fig. 136. |
§ 128.* The Connecting Rod Problem.—A particular problem of practical importance is the determination of the force producing the motion of the connecting rod of a steam-engine mechanism of the usual type. The methods of the two preceding sections may be used when the acceleration of two points in the rod are known. In this problem it is usually assumed that the crank pin K (fig. 136) moves with uniform velocity, so that if α is its angular velocity and r its radius, the acceleration is α2r in a direction along the crank arm from the crank pin to the centre of the shaft. Thus the acceleration of one point K is known completely. The acceleration of a second point, usually taken at the centre of the crosshead pin, can be found by the principles of § 82, but several special geometrical constructions have been devised for this purpose, notably the construction of Klein,4 discovered also independently by Kirsch.5 But probably the most convenient is the construction due to G. T. Bennett6 which is as follows: Let OK be the crank and KB the connecting rod. On the connecting rod take a point L such that KL × KB = KO2. Then, the crank standing at any angle with the line of stroke, draw LP at right angles to the connecting rod, PN at right angles to the line of stroke OB and NA at right angles to the connecting rod; then AO is the acceleration of the point B to the scale on which KO represents the acceleration of the point K. The proof of this construction is given in The Balancing of Engines.
The finding of F may be continued thus: join AK, then AK is the acceleration image of the rod, OKA being the acceleration diagram. Through G, the centre of gravity of the rod, draw Gg parallel to the line of stroke, thus dividing the image at g in the proportion that the connecting rod is divided by G. Hence Og represents the acceleration of the centre of gravity and, the weight of the connecting 1018 rod being ascertained, F can be immediately calculated. To find a point in its line of action, take a point Q on the rod such that KG × GQ = R2, R having been determined experimentally by the method of § 125; join G with O and through Q draw a line parallel to BO to cut GO in Z. Z is a point in the line of action of the resultant force F; hence through Z draw a line parallel to Og. The force F acts in this line, and thus the problem is completely solved. The above construction for Z is a corollary of the general theorem given in § 127.
§ 129. Impact. Impact or collision is a pressure of short duration exerted between two bodies.
The effects of impact are sometimes an alteration of the distribution of actual energy between the two bodies, and always a loss of a portion of that energy, depending on the imperfection of the elasticity of the bodies, in permanently altering their figures, and producing heat. The determination of the distribution of the actual energy after collision and of the loss of energy is effected by means of the following principles:—
I. The motion of the common centre of gravity of the two bodies is unchanged by the collision.
II. The loss of energy consists of a certain proportion of that part of the actual energy of the bodies which is due to their motion relatively to their common centre of gravity.
Unless there is some special reason for using impact in machines, it ought to be avoided, on account not only of the waste of energy which it causes, but from the damage which it occasions to the frame and mechanism.
1 In view of the great authority of the author, the late Professor Macquorn Rankine, it has been thought desirable to retain the greater part of this article as it appeared in the 9th edition of the Encyclopaedia Britannica. Considerable additions, however, have been introduced in order to indicate subsequent developments of the subject; the new sections are numbered continuously with the old, but are distinguished by an asterisk. Also, two short chapters which concluded the original article have been omitted—ch. iii., “On Purposes and Effects of Machines,” which was really a classification of machines, because the classification of Franz Reuleaux is now usually followed, and ch. iv., “Applied Energetics, or Theory of Prime Movers,” because its subject matter is now treated in various special articles, e.g. Hydraulics, Steam Engine, Gas Engine, Oil Engine, and fully developed in Rankine’s The Steam Engine and Other Prime Movers (London, 1902). (Ed. E.B.)
2 Since the relation discussed in § 7 was enunciated by Rankine, an enormous development has taken place in the subject of Graphic Statics, the first comprehensive textbook on the subject being Die Graphische Statik by K. Culmann, published at Zürich in 1866. Many of the graphical methods therein given have now passed into the textbooks usually studied by engineers. One of the most beautiful graphical constructions regularly used by engineers and known as “the method of reciprocal figures” is that for finding the loads supported by the several members of a braced structure, having given a system of external loads. The method was discovered by Clerk Maxwell, and the complete theory is discussed and exemplified in a paper “On Reciprocal Figures, Frames and Diagrams of Forces,” Trans. Roy. Soc. Ed., vol. xxvi. (1870). Professor M. W. Crofton read a paper on “Stress-Diagrams in Warren and Lattice Girders” at the meeting of the Mathematical Society (April 13, 1871), and Professor O. Henrici illustrated the subject by a simple and ingenious notation. The application of the method of reciprocal figures was facilitated by a system of notation published in Economics of Construction in relation to framed Structures, by Robert H. Bow (London, 1873). A notable work on the general subject is that of Luigi Cremona, translated from the Italian by Professor T. H. Beare (Oxford, 1890), and a discussion of the subject of reciprocal figures from the special point of view of the engineering student is given in Vectors and Rotors by Henrici and Turner (London, 1903). See also above under “Theoretical Mechanics,” Part 1. § 5.
3 This is a particular case of a more general principle, that the motion of the centre of gravity of a body is not affected by the mutual actions of its parts.
4 J. F. Klein, “New Constructions of the Force of Inertia of Connecting Rods and Couplers and Constructions of the Pressures on their Pins,” Journ. Franklin Inst., vol. 132 (Sept. and Oct., 1891).
5 Prof. Kirsch, “Über die graphische Bestimmung der Kolbenbeschleunigung,” Zeitsch. Verein deutsche Ingen. (1890), p. 1320.
6 Dalby, The Balancing of Engines (London, 1906), app. 1.
MECHANICVILLE, a village of Saratoga county, New York, U.S.A., on the west bank of the Hudson River, about 20 m. N. of Albany; on the Delaware & Hudson and Boston & Maine railways. Pop. (1900), 4695 (702 foreign-born); (1905, state census), 5877; (1910) 6,634. It lies partly within Stillwater and partly within Half-Moon townships, in the bottom-lands at the mouth of the Anthony Kill, about 1-1/2 m. S. of the mouth of the Hoosick River. On the north and south are hills reaching a maximum height of 200 ft. There is ample water power, and there are manufactures of paper, sash and blinds, fibre, &c. From a dam here power is derived for the General Electric Company at Schenectady. The first settlement in this vicinity was made in what is now Half-Moon township about 1680. Mechanicville (originally called Burrow) was chartered by the county court in 1859, and incorporated as a village in 1870. It was the birthplace of Colonel Ephraim Elmer Ellsworth (1837-1861), the first Federal officer to lose his life in the Civil War.
MECHITHARISTS, a congregation of Armenian monks in communion with the Church of Rome. The founder, Mechithar, was born at Sebaste in Armenia, 1676. He entered a monastery, but under the influence of Western missionaries he became possessed with the idea of propagating Western ideas and culture in Armenia, and of converting the Armenian Church from its monophysitism and uniting it to the Latin Church. Mechithar set out for Rome in 1695 to make his ecclesiastical studies there, but he was compelled by illness to abandon the journey and return to Armenia. In 1696 he was ordained priest and for four years worked among his people. In 1700 he went to Constantinople and began to gather disciples around him. Mechithar formally joined the Latin Church, and in 1701, with sixteen companions, he formed a definitely religious institute of which he became the superior. Their Uniat propaganda encountered the opposition of the Armenians and they were compelled to move to the Morea, at that time Venetian territory, and there built a monastery, 1706. On the outbreak of hostilities between the Turks and Venetians they migrated to Venice, and the island of St Lazzaro was bestowed on them, 1717. This has since been the headquarters of the congregation, and here Mechithar died in 1749, leaving his institute firmly established. The rule followed at first was that attributed to St Anthony; but when they settled in the West modifications from the Benedictine rule were introduced, and the Mechitharists are numbered among the lesser orders affiliated to the Benedictines. They have ever been faithful to their founder’s programme. Their work has been fourfold: (1) they have brought out editions of important patristic works, some Armenian, others translated into Armenian from Greek and Syriac originals no longer extant; (2) they print and circulate Armenian literature among the Armenians, and thereby exercise a powerful educational influence; (3) they carry on schools both in Europe and Asia, in which Uniat Armenian boys receive a good secondary education; (4) they work as Uniat missioners in Armenia. The congregation is divided into two branches, the head houses being at St Lazzaro and Vienna. They have fifteen establishments in various places in Asia Minor and Europe. There are some 150 monks, all Armenians; they use the Armenian language and rite in the liturgy.
See Vita del servo di Dio Mechitar (Venice, 1901); E. Boré, Saint-Lazare (1835); Max Heimbucher, Orden u. Kongregationen (1907) I. § 37; and the articles in Wetzer u. Welte, Kirchenlexicon (ed. 2) and Herzog, Realencyklopädie (ed. 3), also articles by Sargisean, a Mechitharist, in Rivista storica benedettina (1906), “La Congregazione Mechitarista.”
MECKLENBURG, a territory in northern Germany, on the Baltic Sea, extending from 53° 4′ to 54° 22′ N. and from 10° 35′ to 13° 57′ E., unequally divided into the two grand duchies of Mecklenburg-Schwerin and Mecklenburg-Strelitz.
Mecklenburg-schwerin is bounded N. by the Baltic Sea, W. by the principality of Ratzeburg and Schleswig-Holstein, S. by Brandenburg and Hanover, and E. by Pomerania and Mecklenburg-Strelitz. It embraces the duchies of Schwerin and Güstrow, the district of Rostock, the principality of Schwerin, and the barony of Wismar, besides several small enclaves (Ahrensberg, Rosson, Tretzeband, &c.) in the adjacent territories. Its area is 5080 sq. m. Pop. (1905), 625,045.
Mecklenburg-strelitz consists of two detached parts, the duchy of Strelitz on the E. of Mecklenburg-Schwerin, and the principality of Ratzeburg on the W. The first is bounded by Mecklenburg-Schwerin, Pomerania and Brandenburg, the second by Mecklenburg-Schwerin, Lauenburg, and the territory of the free town of Lübeck. Their joint area is 1130 sq. m. Pop. (1905), 103,451.
Mecklenburg lies wholly within the great North-European plain, and its flat surface is interrupted only by one range of low hills, intersecting the country from south-east to north-west, and forming the watershed between the Baltic Sea and the Elbe. Its highest point, the Helpter Berg, is 587 ft. above sea-level. The coast-line runs for 65 m. along the Baltic (without including indentations), for the most part in flat sandy stretches covered with dunes. The chief inlets are Wismar Bay, the Salzhaff, and the roads of Warnemünde. The rivers are numerous though small; most of them are affluents of the Elbe, which traverses a small portion of Mecklenburg. Several are navigable, and the facilities for inland water traffic are increased by canals. Lakes are numerous; about four hundred, covering an area of 500 sq. m., are reckoned in the two duchies. The largest is Lake Müritz, 52 sq. m. in extent. The climate resembles that of Great Britain, but the winters are generally more severe; the mean annual temperature is 48° F., and the annual rainfall is about 28 in. Although there are long stretches of marshy moorland along the coast, the soil is on the whole productive. About 57% of the total area of Mecklenburg-Schwerin consists of cultivated land, 18% of forest, and 13% of heath and pasture. In Mecklenburg-Strelitz the corresponding figures are 47, 21 and 10%. Agriculture is by far the most important industry in both duchies. The chief crops are rye, oats, wheat, potatoes and hay. Smaller areas are devoted to maize, buckwheat, pease, rape, hemp, flax, hops and tobacco. The extensive pastures support large herds of sheep and cattle, including a noteworthy breed of merino sheep. The horses of Mecklenburg are of a fine sturdy quality and highly esteemed. Red deer, wild swine and various other game are found in the forests. The industrial establishments include a few iron-foundries, wool-spinning mills, carriage and machine factories, dyeworks, tanneries, brick-fields, soap-works, breweries, distilleries, numerous limekilns and tar-boiling works, tobacco and cigar factories, and numerous mills of various kinds. Mining is insignificant, though a fair variety of minerals is represented in the district. Amber is found on and near the Baltic coast. Rostock, Warnemünde and Wismar are the principal commercial centres. The chief exports are grain and other agricultural produce, live stock, spirits, wood and wool; the chief imports are colonial produce, iron, coal, salt, wine, beer and tobacco. The horse and wool markets of Mecklenburg are largely attended by buyers from various parts of Germany. Fishing is carried on extensively in the numerous inland lakes.
In 1907 the grand dukes of both duchies promised a constitution to their subjects. The duchies had always been under a government of feudal character, the grand dukes having the executive entirely in their hands (though acting through ministers), while the duchies shared a diet (Landtag), meeting for a short session each year, and at other times represented by a committee, and consisting of the proprietors of knights’ estates (Rittergüter), known as the Ritterschaft, and the Landschaft or burgomasters of certain towns. 1019 Mecklenburg-Schwerin returns six members to the Reichstag and Mecklenburg-Strelitz one member.
In Mecklenburg-Schwerin the chief towns are Rostock (with a university), Schwerin, and Wismar the capital. The capital of Mecklenburg-Strelitz is Neu-Strelitz. The peasantry of Mecklenburg retain traces of their Slavonic origin, especially in speech, but their peculiarities have been much modified by amalgamation with German colonists. The townspeople and nobility are almost wholly of Saxon strain. The slowness of the increase in population is chiefly accounted for by emigration.
History.—The Teutonic peoples, who in the time of Tacitus occupied the region now known as Mecklenburg, were succeeded in the 6th century by some Slavonic tribes, one of these being the Obotrites, whose chief fortress was Michilenburg, the modern Mecklenburg, near Wismar; hence the name of the country. Though partly subdued by Charlemagne towards the close of the 8th century, they soon regained their independence, and until the 10th century no serious effort was made by their Christian neighbours to subject them. Then the German king, Henry the Fowler, reduced the Slavs of Mecklenburg to obedience and introduced Christianity among them. During the period of weakness through which the German kingdom passed under the later Ottos, however, they wrenched themselves free from this bondage; the 11th and the early part of the 12th century saw the ebb and flow of the tide of conquest, and then came the effective subjugation of Mecklenburg by Henry the Lion, duke of Saxony. The Obotrite prince Niklot was killed in battle in 1160 whilst resisting the Saxons, but his son Pribislaus (d. 1178) submitted to Henry the Lion, married his daughter to the son of the duke, embraced Christianity, and was permitted to retain his office. His descendants and successors, the present grand dukes of Mecklenburg, are the only ruling princes of Slavonic origin in Germany. Henry the Lion introduced German settlers and restored the bishoprics of Ratzeburg and Schwerin; in 1170 the emperor Frederick I. made Pribislaus a prince of the empire. From 1214 to 1227 Mecklenburg was under the supremacy of Denmark; then, in 1229, after it had been regained by the Germans, there took place the first of the many divisions of territory which with subsequent reunions constitute much of its complicated history. At this time the country was divided between four princes, grandsons of duke Henry Borwin, who had died two years previously. But in less than a century the families of two of these princes became extinct, and after dividing into three branches a third family suffered the same fate in 1436. There then remained only the line ruling in Mecklenburg proper, and the princes of this family, in addition to inheriting the lands of their dead kinsmen, made many additions to their territory, including the counties of Schwerin and of Strelitz. In 1352 the two princes of this family made a division of their lands, Stargard being separated from the rest of the country to form a principality for John (d. 1393), but on the extinction of his line in 1471 the whole of Mecklenburg was again united under a single ruler. One member of this family, Albert (c. 1338-1412), was king of Sweden from 1364 to 1389. In 1348 the emperor Charles IV. had raised Mecklenburg to the rank of a duchy, and in 1418 the university of Rostock was founded.
The troubles which arose from the rivalry and jealousy of two or more joint rulers incited the prelates, the nobles and the burghers to form a union among themselves, and the results of this are still visible in the existence of the Landesunion for the whole country which was established in 1523. About the same time the teaching of Luther and the reformers was welcomed in Mecklenburg, although Duke Albert (d. 1547) soon reverted to the Catholic faith; in 1549 Lutheranism was recognized as the state religion; a little later the churches and schools were reformed and most of the monasteries were suppressed. A division of the land which took place in 1555 was of short duration, but a more important one was effected in 1611, although Duke John Albert I. (d. 1576) had introduced the principle of primogeniture and had forbidden all further divisions of territory. By this partition John Albert’s grandson Adolphus Frederick I. (d. 1658) received Schwerin, and another grandson John Albert II. (d. 1636) received Güstrow. The town of Rostock “with its university and high court of justice” was declared to be common property, while the Diet or Landtag also retained its joint character, its meetings being held alternately at Sternberg and at Malchin.
During the early part of the Thirty Years’ War the dukes of Mecklenburg-Schwerin and Mecklenburg-Güstrow were on the Protestant side, but about 1627 they submitted to the emperor Ferdinand II. This did not prevent Ferdinand from promising their land to Wallenstein, who, having driven out the dukes, was invested with the duchies in 1629 and ruled them until 1631. In this year the former rulers were restored by Gustavus Adolphus of Sweden, and in 1635 they came to terms with the emperor and signed the peace of Prague, but their land continued to be ravaged by both sides until the conclusion of the war. In 1648 by the Treaty of Westphalia, Wismar and some other parts of Mecklenburg were surrendered to Sweden, the recompense assigned to the duchies including the secularized bishoprics of Schwerin and of Ratzeburg. The sufferings of the peasants in Mecklenburg during the Thirty Years’ War were not exceeded by those of their class in any other part of Germany; most of them were reduced to a state of serfdom and in some cases whole villages vanished. Christian Louis who ruled Mecklenburg-Schwerin from 1658 until his death in 1692 was, like his father Adolphus Frederick, frequently at variance with the estates of the land and with members of his family. He was a Roman Catholic and a supporter of Louis XIV., and his country suffered severely during the wars waged by France and her allies in Germany.
In June 1692 when Christian Louis died in exile and without sons, a dispute arose about the succession to his duchy between his brother Adolphus Frederick and his nephew Frederick William. The emperor and the rulers of Sweden and of Brandenburg took part in this struggle which was intensified when, three years later, on the death of Duke Gustavus Adolphus, the family ruling over Mecklenburg-Güstrow became extinct. At length the partition Treaty of Hamburg was signed on the 8th of March 1701, and a new division of the country was made. Mecklenburg was divided between the two claimants, the shares given to each being represented by the existing duchies of Mecklenburg-Schwerin, the part which fell to Frederick William, and Mecklenburg-Strelitz, the share of Adolphus Frederick. At the same time the principle of primogeniture was again asserted, and the right of summoning the joint Landtag was reserved to the ruler of Mecklenburg-Schwerin.
Mecklenburg-Schwerin began its existence by a series of constitutional struggles between the duke and the nobles. The heavy debt incurred by Duke Charles Leopold (d. 1747), who had joined Russia in a war against Sweden, brought matters to a crisis; the emperor Charles VI. interfered and in 1728 the imperial court of justice declared the duke incapable of governing and his brother Christian Louis was appointed administrator of the duchy. Under this prince, who became ruler de jure in 1747, there was signed in April 1755 the convention of Rostock by which a new constitution was framed for the duchy. By this instrument all power was in the hands of the duke, the nobles and the upper classes generally, the lower classes being entirely unrepresented. During the Seven Years’ War Duke Frederick (d. 1785) took up a hostile attitude towards Frederick the Great, and in consequence Mecklenburg was occupied by Prussian troops, but in other ways his rule was beneficial to the country. In the early years of the French revolutionary wars Duke Frederick Francis I. (1756-1837) remained neutral, and in 1803 he regained Wismar from Sweden, but in 1806 his land was overrun by the French and in 1808 he joined the Confederation of the Rhine. He was the first member of the confederation to abandon Napoleon, to whose armies he had sent a contingent, and in 1813-1814 he fought against France. In 1815 he joined the Germanic Confederation (Bund) and took the title of grand duke. In 1819 serfdom was abolished in his dominions. During the movement of 1848 the duchy witnessed a considerable agitation in favour of a more liberal constitution, but in the subsequent reaction all the concessions which had been 1020 made to the democracy were withdrawn and further restrictive measures were introduced in 1851 and 1852.
Mecklenburg-Strelitz adopted the constitution of the sister duchy by an act of September 1755. In 1806 it was spared the infliction of a French occupation through the good offices of the king of Bavaria; in 1808 its duke, Charles (d. 1816), joined the confederation of the Rhine, but in 1813 he withdrew therefrom. Having been a member of the alliance against Napoleon he joined the Germanic confederation in 1815 and assumed the title of grand duke.
In 1866 both the grand dukes of Mecklenburg joined the North German confederation and the Zollverein, and began to pass more and more under the influence of Prussia, who in the war with Austria had been aided by the soldiers of Mecklenburg-Schwerin. In the Franco-German War also Prussia received valuable assistance from Mecklenburg, Duke Frederick Francis II. (1823-1883), an ardent advocate of German unity, holding a high command in her armies. In 1871 the two grand duchies became states of the German Empire. There was now a renewal of the agitation for a more democratic constitution, and the German Reichstag gave some countenance to this movement. In 1897 Frederick Francis IV. (b. 1882) succeeded his father Frederick Francis III. (1851-1897) as grand duke of Mecklenburg-Schwerin, and in 1904 Adolphus Frederick (b. 1848) a son of the grand duke Frederick William (1819-1904) and his wife Augusta Carolina, daughter of Adolphus Frederick, duke of Cambridge, became grand duke of Mecklenburg-Strelitz. The grand dukes still style themselves princes of the Wends.
See F. A. Rudloff, Pragmatisches Handbuch der mecklenburgischen Geschichte (Schwerin, 1780-1822); C. C. F. von Lützow, Versuch einer pragmatischen Geschichte von Mecklenburg (Berlin, 1827-1835); Mecklenburgische Geschichte in Einzeldarstellungen, edited by R. Beltz, C. Beyer, W. P. Graff and others; C. Hegel, Geschichte der mecklenburgischen Landstände bis 1555 (Rostock, 1856); A. Mayer, Geschichte des Grossherzogtums Mecklenburg-Strelitz 1816-1890 (New Strelitz, 1890); Tolzien, Die Grossherzöge von Mecklenburg-Schwerin (Wismar, 1904); Lehsten, Der Adel Mecklenburgs seit dem landesgrundgesetslichen Erbvergleich (Rostock, 1864); the Mecklenburgisches Urkundenbuch in 21 vols. (Schwerin, 1873-1903); the Jahrbücher des Vereins für mecklenburgische Geschichte und Altertumskunde (Schwerin, 1836 fol.); and W. Raabe, Mecklenburgische Vaterlandskunde (Wismar, 1894-1896); von Hirschfeld, Friedrich Franz II., Grossherzog von Mecklenburg-Schwerin und seine Vorgänger (Leipzig, 1891); Volz, Friedrich Franz II. (Wismar, 1893); C. Schröder, Friedrich Franz III. (Schwerin, 1898); Bartold, Friedrich Wilhelm, Grossherzog von Mecklenburg-Strelitz und Augusta Carolina (New Strelitz, 1893); and H. Sachsse, Mecklenburgische Urkunden und Daten (Rostock, 1900).